分布式异步任务组件网络通信线程模型设计--
大概说一下功能场景:
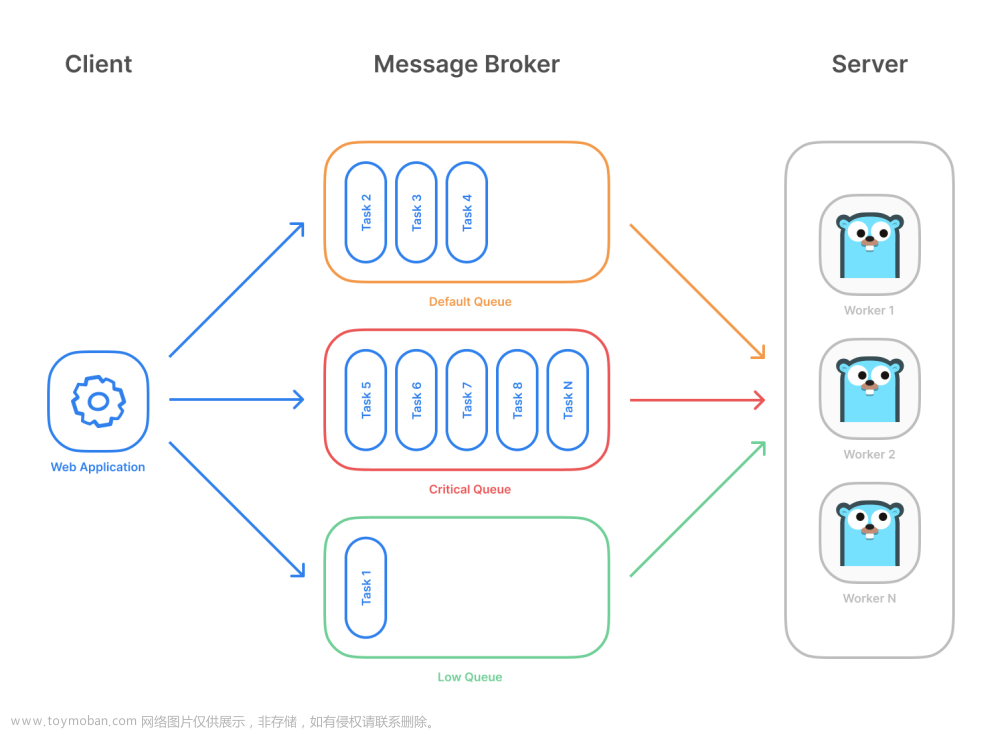
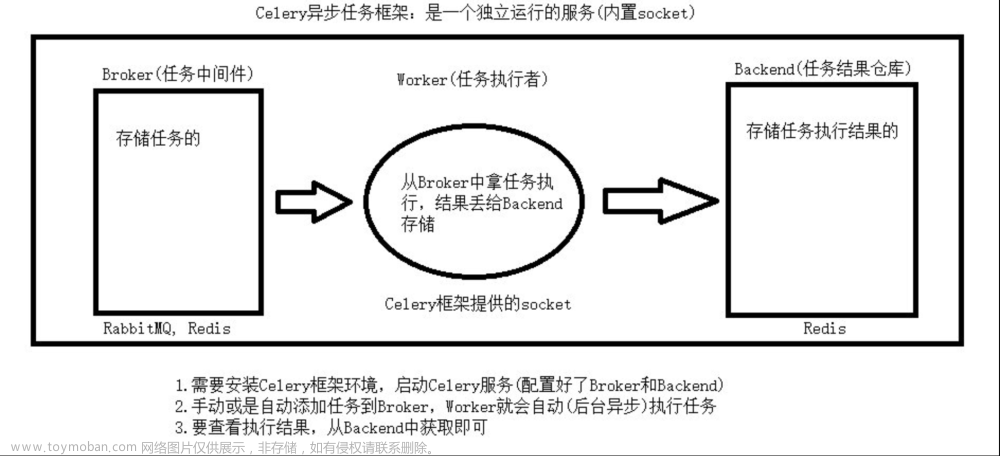
- 从节点和主节点建立连接,负责和主节点的网络IO通信,通信动作包括投票,心跳,举证等,步骤为读取主节点的信息,写入IO队列中,然后从IO队列中读取解码,翻译成具体的协议命令,发送给上层线程处理;或者从上层线程接受命令,编码成字节流,写入IO队列,通信线程从IO队列中读取需要发送的字节buffer,通过网络发送给主节点;
- 主节点和多个从节点建立连接,负责每个从节点的网络IO通信,包括投票,心跳,举证操作,具体操作和从节点的操作相同,多了一个建立连接的步骤--如图

初期线程模型设计--
每条网络数据传输通道一条线程,即一条线程负责网络IO处理,另外一条线程处理数据编解码,整体使用同一个IOQueue--其实这里是两个;读写队列分开;但在线程模型里我们认为面对的是一个IOQueue即可;如图
首先说一下线程拆分的原则--
基于事件反应器设计下的原子性保证--
NIO中的一个socketchannel面对的是一个连接,底层可以理解为一个线程在处理数据IO,IO事件通过selector发布;这里一个selector可以处理多个Socket连接的多个事件,但是selector本身的设计实现是同步模式的,多线程读取selector中的事件需要阻塞,也就是说同一时刻只能有一个线程读取selector中的事件并消费;如果有多个线程同时监听selector中的事件未获取到锁的线程只能阻塞,所以这里对一个selector对象只使用一个线程处理IO事件(读写可以分开为两个事件);
对于同一个通信连接中的数据可能出现拆包和粘包的现象,所以这里对一个连接只使用一个IO队列;相对应的,对同一个读写队列也只使用一个线程来处理--但是这里读写队列是分开的;
对于同一个命令的处理也应该是原子的,所以对同一个命令也需要一个线程来操作;文章来源:https://www.toymoban.com/news/detail-640573.html
主要关注一下可以线程拆分的几个点:文章来源地址https://www.toymoban.com/news/detail-640573.html
- JavaNIO实现的TCP是半双工通道,也就是同一个channel可以读也可写,但是同一时刻只能进行读或者写操作中的同一个,所以这点对于底层通信线程设计很重要;
- 同一个通信连接的读和写操作是否需要拆分:
- 一个线程负责读数据,一个线程负责写数据;
- 如果对一个Socketchannel的读写分开两个线程操作的话,有两种设计方案:一个socketchannel只注册到一个selector上,读写线程各自监听同一个selector的读写事件,分别处理读操作和写操作;
- 另一种是两个线程分别拥有自己的selector,每个线程从各自的selector上单独监听读事件或者写事件--这样其实已经违反了NIO设计的原则,--NIO核心是一个线程可以监听多个channel,如果一个channel使用多个线程监听的话反而不如使用BIO来处理,因为channel实际上是半双工实现,读和写操作都是同步进行的;
- --综上,读写同步进行的情况下,使用多线程读写并不能实际上增加并发度;因为如果读写分开的话,读线程必须等写线程写完数据才可以读取;反之一样;而读写数据本身的操作只不过是完成一个队列操作;
- 另外,如果多线程对同一IO队列并发读写要考虑顺序问题
- 这里实现为为每个IO连接维护命令队列,可以使用线程池进行编解码--具体那种效果最好要看后期压测结果;
到了这里,关于分布式异步任务处理组件(八)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!