😏★,°:.☆( ̄▽ ̄)/$:.°★ 😏
这篇文章主要介绍navigation导航模块学习与算法示例。
学其所用,用其所学。——梁启超
欢迎来到我的博客,一起学习,共同进步。
喜欢的朋友可以关注一下,下次更新不迷路🥞
😏1. 导航模块介绍
导航模块是机器人系统中的一个重要组件,用于实现机器人在环境中的自主导航和路径规划。
导航模块通常包括以下几个主要部分:
1.环境感知:导航模块需要获取环境信息以进行导航决策。常用的环境感知传感器包括激光雷达、摄像头、惯性测量单元(IMU)等。激光雷达用于获取环境的几何结构和障碍物信息,摄像头可以用于视觉感知和物体检测,IMU则用于测量机器人的姿态和加速度等。
2.机器人定位:机器人定位是导航模块的关键任务之一,它用于估计机器人在环境中的位置和姿态。常用的定位方法包括里程计(Odometry)和激光雷达SLAM(Simultaneous Localization and Mapping)。里程计通过测量机器人轮子的旋转来估计机器人的位移,而激光雷达SLAM利用激光雷达数据同时进行建图和定位。
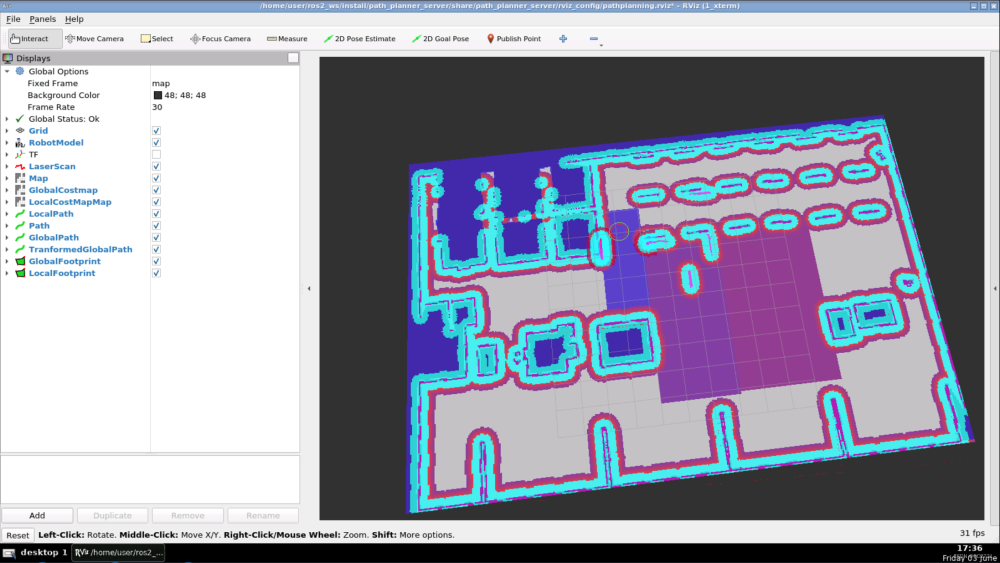
3.地图构建:地图构建用于创建环境的表示,通常使用栅格地图(Grid Map)或点云地图(Point Cloud Map)。栅格地图将环境划分为网格,每个网格表示环境的状态(例如占据、自由或未知)。点云地图使用激光雷达或摄像头获取的点云数据来表示环境。
4.路径规划:路径规划是导航模块的核心功能,它确定从机器人当前位置到目标位置的最优路径。常用的路径规划算法包括A*算法、Dijkstra算法、RRT(Rapidly-exploring Random Tree)算法等。这些算法会考虑地图信息、机器人约束和障碍物来生成可行的路径。
5.避障规划:避障规划用于规避环境中的障碍物,确保机器人在导航过程中不会与障碍物发生碰撞。常用的避障规划算法包括局部避障算法(如VFH+、EBand等)和全局避障算法(如弹性带算法)等。这些算法会根据环境和传感器数据生成安全的路径。
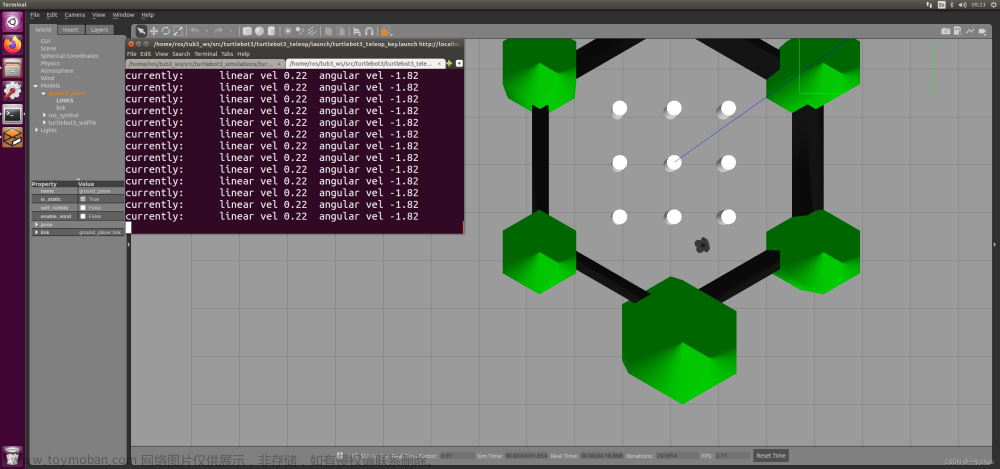
6.控制指令生成:导航模块根据路径规划和避障规划的结果生成机器人的控制指令,控制机器人执行导航任务。控制指令可以包括线速度、角速度等,用于驱动机器人的底层执行器,如电机或舵机。
导航模块的实现常常涉及多个软件包和算法的配合工作,例如在ROS中使用导航栈(Navigation Stack)来实现机器人导航。导航模块的性能和效果受到环境感知、定位精度、地图质量、路径规划算法等多方面因素的影响。
😊2. 2D/3D环境导航常用算法
1.Dijkstra算法:基于图论的寻路算法,用于寻找两点之间的最短路径。它从起点开始,一步一步地向外扩张,直到扩张到目标点为止。
2.A*算法:是一种基于评估函数的启发式寻路算法,能够更加高效地搜索到最短路径。它通过估算从当前节点到目标节点的路径长度,来决定下一步走哪条路径。
3.DWA算法:是一种基于反馈控制的运动规划算法,能够实时计算出机器人在当前环境中的最优轨迹。它通过不断调整机器人的速度和方向,以适应环境的变化和机器人的约束条件。
4.EBF算法:是一种基于经验贝叶斯优化的路径规划算法,能够较好地处理环境的动态变化和非凸障碍物。它通过不断优化半高程地图,以减少轨迹的运动成本。
5.AMCL算法:AMCL算法是一种自适应蒙特卡洛定位算法,可用于3D导航中的机器人位置估计。与2D导航不同的是,AMCL需要融合多种传感器数据,如激光雷达、IMU、RGB-D相机等,实现机器人位置的高精度估计。
6.MoveIt算法:MoveIt是一种运动规划框架和库,为机器人提供路径规划、运动控制、碰撞检测等功能。
7.Move_base算法:是ROS中常用的机器人导航库,它提供了一套完整的导航系统包括路径规划、本地路径跟踪、机器人状态估计等功能。Move_base由多种算法组成。
😆3. ROS中的导航stack
https://github.com/ros-planning/navigation
https://github.com/ros-planning/3d_navigation
 文章来源:https://www.toymoban.com/news/detail-640870.html
文章来源:https://www.toymoban.com/news/detail-640870.html
以上。文章来源地址https://www.toymoban.com/news/detail-640870.html
到了这里,关于【ROS】ros导航navigation模块学习的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!