文章来源地址https://www.toymoban.com/news/detail-645315.html
文章来源:https://www.toymoban.com/news/detail-645315.html
到了这里,关于用于评估调试CH101/CH201超声波传感器的上位机软件的使用方法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
这篇具有很好参考价值的文章主要介绍了用于评估调试CH101/CH201超声波传感器的上位机软件的使用方法。希望对大家有所帮助。如果存在错误或未考虑完全的地方,请大家不吝赐教,您也可以点击"举报违法"按钮提交疑问。
文章来源地址https://www.toymoban.com/news/detail-645315.html
文章来源:https://www.toymoban.com/news/detail-645315.html
到了这里,关于用于评估调试CH101/CH201超声波传感器的上位机软件的使用方法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处: 如若内容造成侵权/违法违规/事实不符,请点击违法举报进行投诉反馈,一经查实,立即删除!
在本应用中,我们将使用一个超声波传感器与两个直流电机和一个伺服电机相结合,Arduino作为主控板创建一个简单的避障机器人。 超声波传感器发送和接收信号以确定物体的距离。 如果距离小于 15 厘米有物体,机器人将停止。 然后它环顾四周,转向一个它什么都感觉不到

目录 1.器件介绍 1.1.参数 1.2.测量范围 1.3.计算公式 1.4.优点 2.1.原理 3.代码编写 3.1.接线图 3.2.代码 3.2.1.HC_SR04.h 3.2.2.HC_SR04.c 3.2.3.timer.h 3.2.4.timer.c 3.2.5.main.c 5根引脚 工作电压5v 工作电流15mA 工作频率40Hz 最近距离 2cm 最远距离 4m 测量角度 15度 测试距离=(高电平时间*声速(340
一、小车1.0——基本蓝牙小车(仅蓝牙遥控小车运动方向,本篇) 二、小车2.0——蓝牙小车PLUS(可以蓝牙控制方向+蓝牙直接调节车速) 三、小车3.0——避障小车(超声波+舵机云台) 四、小车4.0——无线手柄方向感知操控小车(mpu6050+双蓝牙透传) 五、双轮自平衡小车(HAL库版
具有测距、温度补充、实时时钟、记忆、阈值警报、串口数据发送等等功能,通过LCD1602显示,按键进行相关操作。 LCD1602显示共有五个界面,按键一用于切换显示界面。 此界面测距为连续测距模式,LCD1602不间断刷新测量距离和温度,一旦测量距离小于设置的阈
萌新第一次写博客,有格式不正确的地方还请大家见谅。 用HCSR04超声波传感器测量距离,测量范围0~170cm,精确到小数点后一位。 用LCD1602或者数码管显示测量到的距离。 当距离大于120cm时,绿色LED灯亮; (1)当距离在50-120cm之间,蜂鸣器间断发声“滴 滴 滴 ”提示,黄色LED灯亮
教学视频: https://www.bilibili.com/video/BV1Ve411x75W?p=33spm_id_from=pageDrivervd_source=19ae31dff4056e52d2729a4ca212602b 参考资料:STM32的超声波测距程序_超声波测距stm32程序_VaderZhang的博客-CSDN博客 推荐一波自己的文章:STM32蓝牙控制循迹避障小车源代码——3.舵机、超声波测距模块_stem32超声波舵
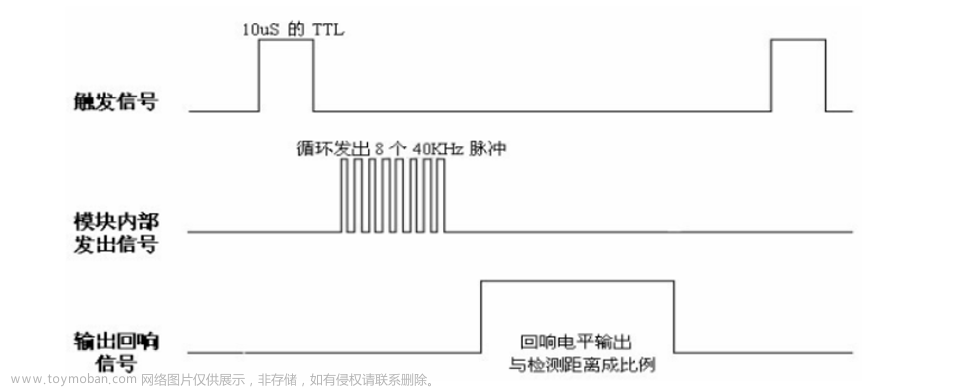
超声波测距模块是用来测量距离的一种产品,通过发送和收超声波,利用时间差和声音传播速度, 计算出模块到前方障碍物的距离 1.测距原理: 给Trig端口至少10us的高电平发送声波,Echo信号,由低电平跳转到高电平,开始发送波;Echo,由高电平跳转回低电平,表示波回来了
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 本项目实现超声波舵机自动避障,手机连接蓝牙控制小车运动、调速两个功能并实现两个功能的切换。 整体思路: 1.T1作为串口的波特率发生器,串口连接HC06蓝牙模块(从机)与手机连接,手机发送数

distance超声波测距模块负责数据的采集,vga、uart、beep、数码管根据采集到的数据分别进行vga的屏幕打点、串口输出到上位机、蜂鸣器根据数据大小进行鸣叫以及数码管显示采集到的数据。 RTL视图 代码 串口控制模块把接受到的24位BCD码转换成ASSIC码,并且清除高位零位和添加

超声波雷达,是通过发射并接收40kHz的超声波,根据时间差算出障碍物距离。其测距精度是1~3cm.常见的超声波雷达有两种:第一种是安装在汽车前后保险杠上的,用于测量汽车前后障碍物的驻车雷达或倒车雷达,称为超声波驻车辅助传感器(Ultrasonic Parking Assistant, UPA);第二种



