查看很多文章有三次多项式插值,五次多项式插值,找了很久没有发现有3-5-3混合多项式插值的代码,想想估计是太简单了, 没有人写这个东西。我当机立断,想把这个代码写出来。虽然简单,但是对于我这种matlab小白来说还是有些吃力。
本文代码借鉴:https://blog.csdn.net/jldemanman?type=blog
代码写出来,我也不知道对不对,希望各位大佬能给我提提建议,纯小白一枚。
clear;
clc;
q_array=[0,5,10,20];%指定起止位置
t_array=[0,1.5,2,5];%指定起止时间
v_array=[0,10,20,0];%指定起止速度
a_array=[0,2,5,0];%指定起止加速度
t=t_array(1);%初始状态
q=q_array(1);
v=v_array(1);
a=a_array(1);
for i=1:1:length(q_array)-1;%每一段规划的时间
if i==1
a10 = q_array(i);
a11 = v_array(i);
a12=(3/(t_array(i+1)-t_array(i))^2)*(q_array(i+1)-q_array(i))-(1/(t_array(i+1)-t_array(i)))*(2*v_array(i)+v_array(i+1));
a13=(2/(t_array(i+1)-t_array(i))^3)*(q_array(i)-q_array(i+1))+(1/(t_array(i+1)-t_array(i))^2)*(v_array(i)+v_array(i+1));%计算三次多项式系数
tz = t_array(i)+0.001:0.001:t_array(i+1);
qz = a10+a11*(tz-t_array(i))+a12*(tz-t_array(i)).^2+a13*(tz-t_array(i)).^3;
vz = a11+2*a12*(tz-t_array(i))+3*a13*(tz-t_array(i)).^2;
az = 2*a12+6*a13*(tz-t_array(i));
t=[t,tz];
q=[q,qz];
v=[v,vz];
a=[a,az];
elseif i==2
T=t_array(i+1)-t_array(i)
a20=q_array(i);
a21=v_array(i);
a22=a_array(i)/2;
a23=(20*q_array(i+1)-20*q_array(i)-(8*v_array(i+1)+12*v_array(i))*T-(3*a_array(i)-a_array(i+1))*T^2)/(2*T^3);
a24=(30*q_array(i)-30*q_array(i+1)+(14*v_array(i+1)+16*v_array(i))*T+(3*a_array(i)-2*a_array(i+1))*T^2)/(2*T^4);
a25=(12*q_array(i+1)-12*q_array(i)-(6*v_array(i+1)+6*v_array(i))*T-(a_array(i)-a_array(i+1))*T^2)/(2*T^5);%计算五次多项式系数
ti=t_array(i):0.001:t_array(i+1);
qi=a20+a21*(ti-t_array(i))+a22*(ti-t_array(i)).^2+a23*(ti-t_array(i)).^3+a24*(ti-t_array(i)).^4+a25*(ti-t_array(i)).^5;
vi=a21+2*a22*(ti-t_array(i))+3*a23*(ti-t_array(i)).^2+4*a24*(ti-t_array(i)).^3+5*a25*(ti-t_array(i)).^4;
ai=2*a22+6*a23*(ti-t_array(i))+12*a24*(ti-t_array(i)).^2+20*a25*(ti-t_array(i)).^3;
t=[t,ti(2:end)];
q=[q,qi(2:end)];
v=[v,vi(2:end)];
a=[a,ai(2:end)];
else
a30 = q_array(i);
a31 = v_array(i);
a32=(3/(t_array(i+1)-t_array(i))^2)*(q_array(i+1)-q_array(i))-(1/(t_array(i+1)-t_array(i)))*(2*v_array(i)+v_array(i+1));
a33=(2/(t_array(i+1)-t_array(i))^3)*(q_array(i)-q_array(i+1))+(1/(t_array(i+1)-t_array(i))^2)*(v_array(i)+v_array(i+1));%计算三次多项式系数
ts = t_array(i)+0.001:0.001:t_array(i+1);
qs = a30+a31*(ts-t_array(i))+a32*(ts-t_array(i)).^2+a33*(ts-t_array(i)).^3;
vs = a31+2*a32*(ts-t_array(i))+3*a33*(ts-t_array(i)).^2;
as = 2*a32+6*a33*(ts-t_array(i));
t=[t,ts];q=[q,qs];v=[v,vs];a=[a,as];
end
end
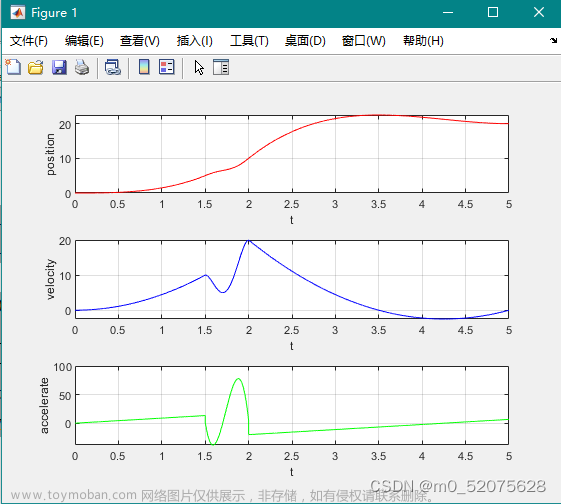
subplot(3,1,1),plot(t,q,'r'),xlabel('t'),ylabel('position');grid on;
subplot(3,1,2),plot(t,v,'b'),xlabel('t'),ylabel('velocity');grid on;
subplot(3,1,3),plot(t,a,'g'),xlabel('t'),ylabel('accelerate');grid on;位置,速度,加速度 图:
 文章来源地址https://www.toymoban.com/news/detail-645468.html
文章来源地址https://www.toymoban.com/news/detail-645468.html
还有一点不明白,为什么要使用3-5-3,用5-5-5不好吗?这样写完全是融合了两者的缺点。加速度很大,突变。难道是我理解的不对???
感谢各位纠错!!
文章来源:https://www.toymoban.com/news/detail-645468.html
到了这里,关于3-5-3机械臂轨迹规划matlab仿真的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!