基于FPGA的PID算法理论详解(1)
1 概述
比例-积分-微分(PID)控制是业内最常见的控制算法,在工业控制领域有很高的接受度。PID控制器的广泛应用得益于其在多种操作条件下稳定的性能,以及易操作的特性。工程师可以用简单直观的方式实现PID控制。PID控制有三个基本要件:比例(proportional)、积分(integral)、微分(derivative)。 通过这三种不同的计算方法可获取最优化结果。
控制系统
PID控制器的基本理念是读取传感器,根据计算比例、积分、微分响应得出期望的激励器输出,将三个值相加计算输出。开始定义PID控制器的参数之前,要先了解闭环系统及其相关术语。
1.1 闭环系统
在一个典型的控制系统里,过程变量是需要被控制的系统变量。 例如,温度(ºC)、压强(psi)、流速(升/分钟)。传感器用来测量过程变量,并对控制系统做出反馈。设定值是过程变量的期望值或必须达到的值。例如,在一个温控系统中,设定温度值为100摄氏度。在任意时间点上,控制系统算法(补偿器)使用过程变量和设定值之间的差值,得到期望的激励器输出,驱动系统(设备)。
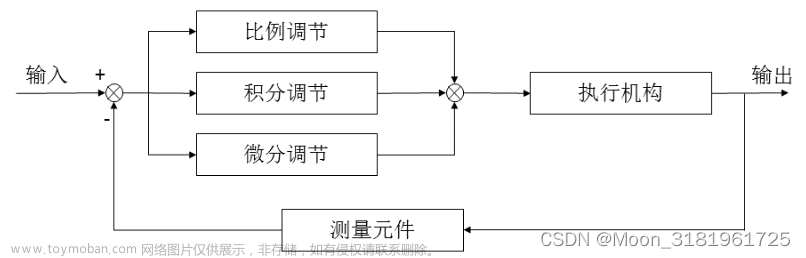
例如,如测量得到的温度过程变量为100 ºC,期望的温度设定值为120 ºC,控制器算法的激励器输出将指示打开加热器。驱动激励器打开加热器,整个系统就逐渐变热,温度过程变量测得的结果也会增加。这就是一个闭环控制系统,读取传感器提供即时反馈,并计算期望的激励器输出,这三项操作以固定速率循环往复,如图1所示。文章来源:https://www.toymoban.com/news/detail-645599.html
在很多情况下,激励器文章来源地址https://www.toymoban.com/news/detail-645599.html
到了这里,关于基于FPGA的PID算法理论详解(1)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!




![[FPGA 学习记录] 数码管动态显示](https://imgs.yssmx.com/Uploads/2024/02/766282-1.png)
![[FPGA 学习记录] 数码管静态显示](https://imgs.yssmx.com/Uploads/2024/02/774668-1.gif)



