LabVIEW使用图像处理进行交通控制性能分析
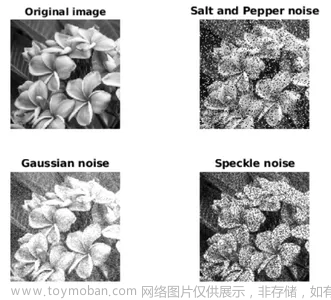
采用普雷维特、拉普拉斯、索贝尔和任意的空间域方法对存储的图像进行边缘检测,并获取实时图像。然而,对四种不同空间域边缘检测方法的核的性能分析。
以前,空路图像存储在数据库中,道路上没有任何车辆。将图像转换为阵列,其中应用四种不同的边缘检测方法与存储图像以及捕获的实时图像进行卷积,以生成存储图像和实时图像的边缘检测。均方根误差指标用于计算存储和捕获的边缘检测到的图像的结果分析。根据获得的误差,计算时间估计并将其应用于交通信号灯显示杆,然后允许车辆沿一个方向向其他方向移动。对于相对于特定方向上存在的交通密度的所有方向,都动态遵循该过程。
因此,应用四种不同的空间域边缘检测方法来区分原始图像的边缘。交通信号灯的主要问题是由交警手动完成的。因此,专注于无需人工干预的计时自动化,使用相机视觉是降低人力资源和计算成本的方法。Sobel算子边缘检测方法是一种离散差分算子,用于计算图像的近似梯度以更改强度级别。其余三种边缘检测方法使用拉普拉斯(正负)算子、Prewitt(垂直和水平)算子、任意算子和Sobel(垂直和水平)算子的不同类型的掩模或核对从指定位置捕获的实时图像进行测试。此外,计算所需图像上的误差估计,以分析和管理相对于通道的时序,以打开和关闭信号柱的信号。
实时图像通过相机捕获,其处于固定位置和要覆盖的固定区域,用于连续监视相对于存储在数据库中的图像所捕获的图像。在这里,从车道。
该方案是将数据库中预存储的图像与摄像机定期捕获的实时图像进行比较,以了解系统流量的动态变化。为了理解执行流程,设置时间控制。
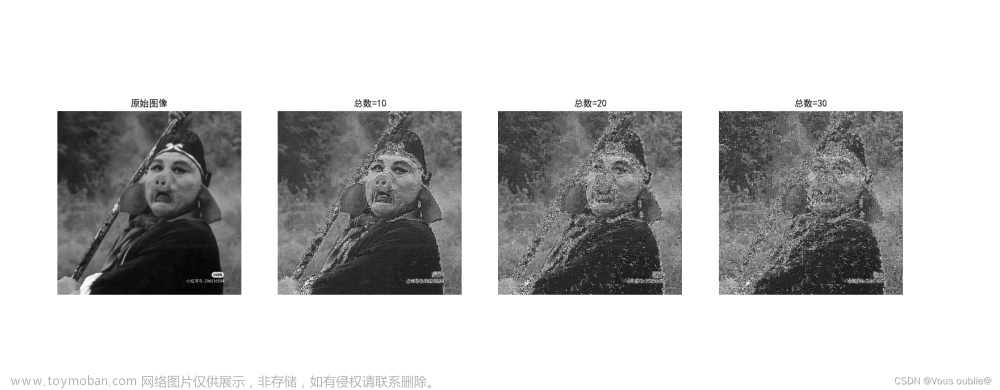
数据库中预先存储的道路图像被转换为二维数组。数据数组与由拉普拉斯、普雷维特、索贝尔和任意方法固定的内核或掩码进行卷积,以从原始图像生成边缘提取。在并行处理中,实时图像的连续捕获被转换为2D图像。转换后的数据与内核卷积以提取实时图像中的边缘。现在计算预存储图像和实时捕获图像的均方根值。然后将边缘检测出预存储的图像和实时图像进行比较,以计算RMSE。将检测到的边缘的RMSE结果除以2,以便将RMSE值减少并固定在百范围内。对有和没有边沿检测图像的RMSE求和进行平均,以生成处理交通控制的时序。
捕获图像的步骤是固定我们在交通中看到的相机位置。尽管摄像头用于放大和缩小以查看实时流量,但为了应用所提出的方案,我们需要固定要覆盖的区域以计算流量。固定区域被限制为默认区域,以实时捕获图像。动态定时计算设置摄像机视图的计时器始终固定为预存储的图像(存储在数据库中)或摄像机系统内以适当地处理流量。

实施拟议方案所涉及的步骤:
• 第1步:
获取存储在数据库中的图像(考虑道路上没有车辆)和相机实时捕获的另一个图像。
• 第2步:
从1生成数据库图像的RMSE和相机捕获的实时图像。
• 第3步:
从1将数据库和捕获的图像转换为2D数组数据。
• 第4步:
从3开始,来自数据库和捕获图像的2D数组数据通过应用四个不同内核(拉普拉斯、Prewitt、Sobel和任意)中的任何一个来从两个图像中提取边缘来转换。
• 第5步:
从4开始,比较生成的边缘图像以计算RMSE值,然后将结果除以10。
• 第6步:
将步骤2和步骤4中的RMSE值相加,然后将结果值除以4,以生成计时器值。
• 第7步:
定时器值应用于信号柱以启动定时器。
• 第8步:
对任何车道动态重复步骤2到步骤7的相同过程,以计算任何时刻的计时器值,以允许道路上特定方向的交通。
分析了所提方案在有无车辆的情况下,利用数据库对道路上有车辆和无车辆进行仿真,并使用拉普拉斯算子、普雷维特算子、任意算子和索贝尔算子四种不同时域方法利用相机采集的实时图像进行仿真。使用图像处理的动态交通控制系统是自动化的,它减少了人力。与许多其他技术不同,所提出的方案可以承受任何类型的大气条件,并且易于实现系统。
这是LabVIEW的一个应用,更多的开发案例,欢迎登录北京瀚文网星官网,了解更多信息。有需要LabVIEW项目合作开发,请与我们联系。文章来源:https://www.toymoban.com/news/detail-646335.html
文章来源地址https://www.toymoban.com/news/detail-646335.html
到了这里,关于LabVIEW使用图像处理进行交通控制性能分析的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!