前言
前面我们用W5100S-EVB-PICO 开发板在TCP Client和TCP Server模式下,分别进行数据回环测试,本章我们将用开发板在UDP Server模式下进行数据回环测试。
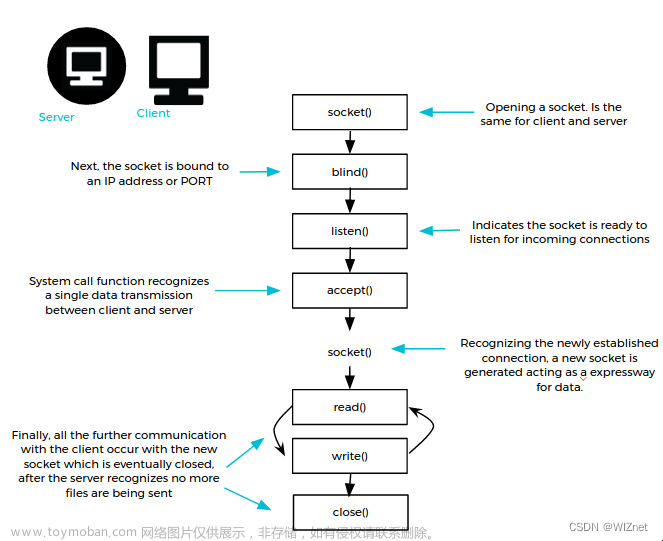
UDP是什么?什么是UDP Server?能干什么?
UDP (User Dataqram Protocol) 是一种无连接的、不可靠的传输协议,用于在计算机网络上传输数据UDP Server是指UDP网络服务的服务器端连接,用于接收客户端的数据报文并返回响应,实现网络数据的交互。
UDP Server的主要作用是接收客户端发送的数据报文,并进行处理和响应。通过UDP Server,客户端可以将数据报文发送到服务器,并从服务器接收响应。由于UDP是无连接的,因此每个数据报文都是独立处理的,服务器对于未收到的数据报文不会重传。
在UDP Server中,服务器程序需要指定监听的端口号,并使用UDP协议接收客户端发送的数据报文。一旦接收到数据报文,服务器程序会对报文进行处理,并返回相应的响应报文。
因此,UDP Server可以帮助设备实现数据报文的快速传输和响应,适用于一些对于数据传输速度和实时性要求较高的应用,如视频直播、语音通话等。在UDP Server中,由于数据报文的传输是不可靠的,因此需要客户端程序进行重传和超时处理,以保证数据的可靠传输。
UDP Server 和 UDP Client有何不同?
UDP服务器:
- 首先初始化
- 打开特定端口监听
- 可以接受多个客户端连接
UDP客户端:
- 指定目标IP和端口
- 发送数据
从套接字编程角度来看,两者完全相同。因此我们仅用UDP Server来做数据回环测试。
连接方式
使开发板和我们的电脑处于同一网段:
- 开发板通过交叉线直连主机
- 开发板和主机都接在路由器LAN口
测试工具
- 网路调试工具(任意)
- wireshark抓包工具
回环测试
1.相关代码
我们打开例程中库文件的loopback.c文件,可以看到udp server回环测试函数,它有三个参数:socket(套接字)端口号(0~3个端口,可开4路socket)、数据收发缓存buf、监听端口;原理上依旧是通过Switch状态机轮询socket端口(所开端口的套接字)状态,根据不同状态做出相应处理,与tcp不同的是,udp只有做了两个状态处理,如果为关闭状态就初始化socket状态为udp协议模式,并开始监听设置的端口;如果状态已经处于udp模式,即socket初始化后,就进行判断是否收到数据,收到就进行回传。如下所示:
int32_t loopback_udps(uint8_t sn, uint8_t* buf, uint16_t port)
{
int32_t ret;
uint16_t size, sentsize;
uint8_t destip[4];
uint16_t destport;
switch(getSn_SR(sn))
{
case SOCK_UDP :
if((size = getSn_RX_RSR(sn)) > 0)
{
if(size > DATA_BUF_SIZE) size = DATA_BUF_SIZE;
ret = recvfrom(sn, buf, size, destip, (uint16_t*)&destport);
buf[ret]=0x00;
printf("recv form[%d.%d.%d.%d][%d]: %s\n", destip[0],destip[1],destip[2],destip[3],destport,buf);
if(ret <= 0)
{
#ifdef _LOOPBACK_DEBUG_
printf("%d: recvfrom error. %ld\r\n",sn,ret);
#endif
return ret;
}
size = (uint16_t) ret;
sentsize = 0;
while(sentsize != size)
{
ret = sendto(sn, buf+sentsize, size-sentsize, destip, destport);
if(ret < 0)
{
#ifdef _LOOPBACK_DEBUG_
printf("%d: sendto error. %ld\r\n",sn,ret);
#endif
return ret;
}
sentsize += ret; // Don't care SOCKERR_BUSY, because it is zero.
}
}
break;
case SOCK_CLOSED:
#ifdef _LOOPBACK_DEBUG_
//printf("%d:UDP loopback start\r\n",sn);
#endif
if((ret = socket(sn, Sn_MR_UDP, port, 0x00)) != sn)
return ret;
#ifdef _LOOPBACK_DEBUG_
printf("%d:Opened, UDP loopback, port [%d]\r\n", sn, port);
#endif
break;
default :
break;
}
return 1;
}
然后我们在主函数里循环调用测试函数即可。可以看到里面还注释了一个udp client回环测试函数,这个基本跟udp server相同,独立出来是为了方便用户自己进行测试,这里不在演示。如下所示:
#define SOCKET_ID 0
#define ETHERNET_BUF_MAX_SIZE (1024 * 2)
void network_init(void);
wiz_NetInfo net_info = {
.mac = {0x00, 0x08, 0xdc, 0x16, 0xed, 0x2e},
.ip = {192, 168, 1, 10},
.sn = {255, 255, 255, 0},
.gw = {192, 168, 1, 1},
.dns = {8, 8, 8, 8},
.dhcp = NETINFO_STATIC};
wiz_NetInfo get_info;
static uint8_t ethernet_buf[ETHERNET_BUF_MAX_SIZE] = {0,};
static uint8_t destip[4]={192, 168, 1, 2};
static uint16_t destport = 8080;
static uint16_t local_port =8000;
int main()
{
stdio_init_all();
sleep_ms(2000);
network_init();
while(true)
{
// loopback_udpc(SOCKET_ID, ethernet_buf, destip, destport);
loopback_udps(SOCKET_ID, ethernet_buf, local_port);
sleep_ms(500);
}
}
void network_init(void)
{
uint8_t temp;
wizchip_initialize();
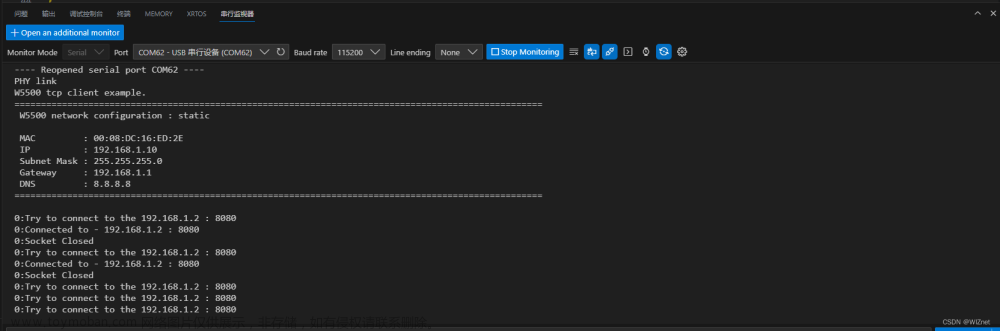
printf("W5500 udp test example.\r\n");
sleep_ms(2000);
wizchip_setnetinfo(&net_info);
print_network_information(get_info);
sleep_ms(2000);
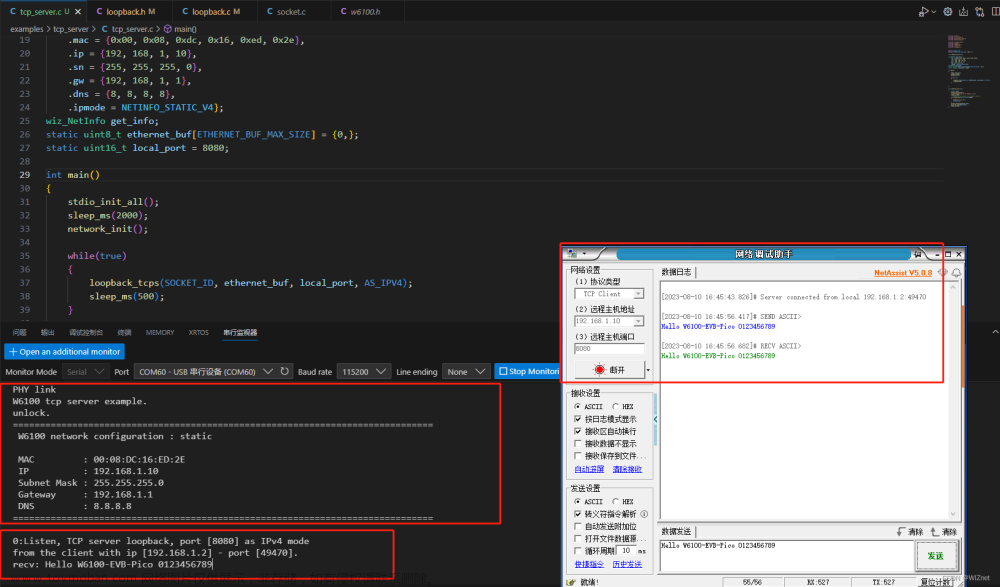
}2.测试现象
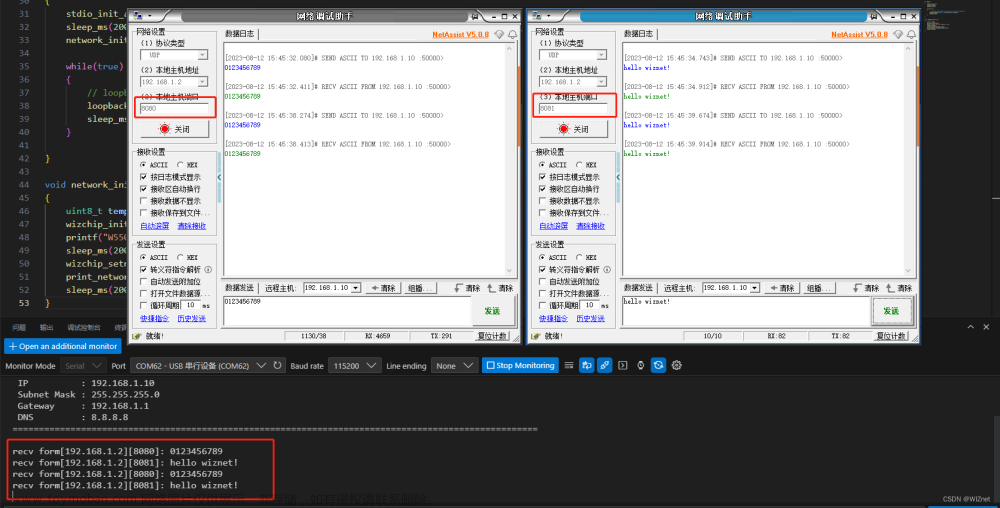
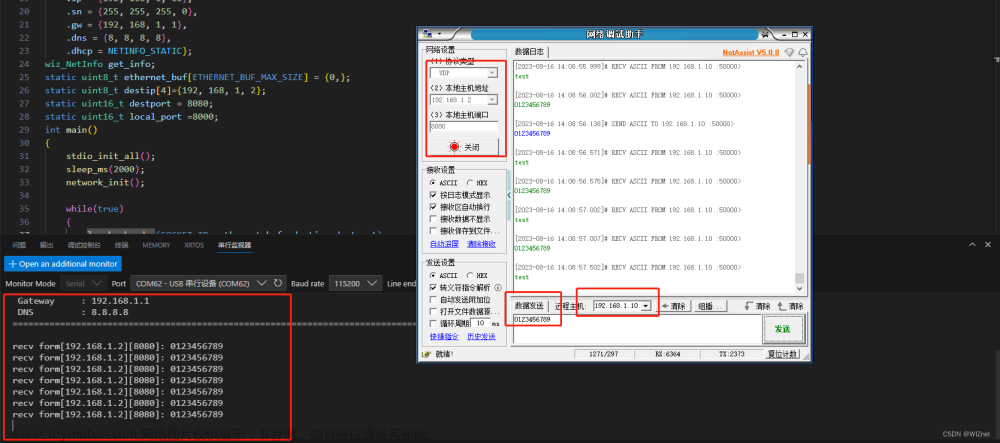
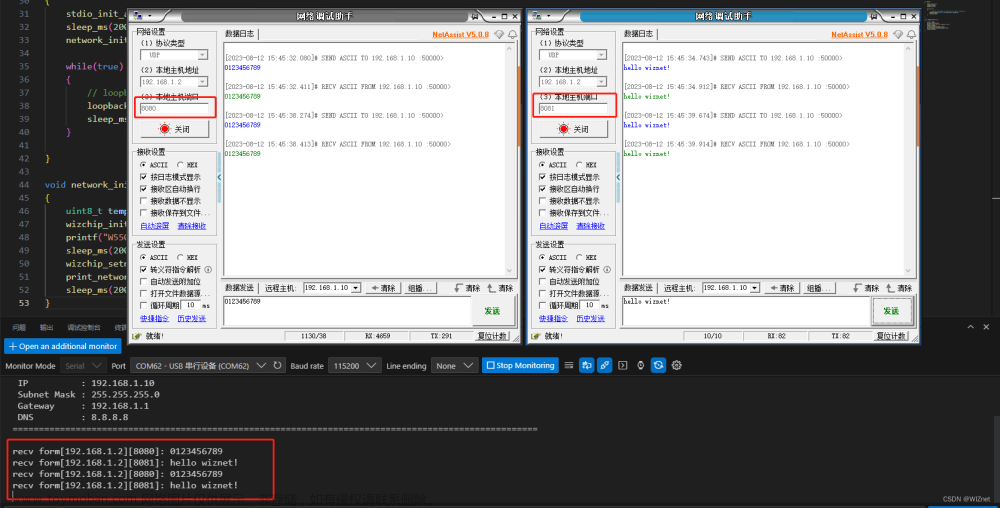
编译烧录后,打开串行监视器,看到网络信息配置成功后,打开两个网络调试助手,参数依次设置为UDP、本机的IP、8080,注意另一个调试助手的端口参数设置跟第一个不可以相同,避免冲突;这里将其设置为8081,完成后打开;然后远程IP和端口选择我们开发板设置的IP和端口,我这里是192.168.1.10 : 8000,然后我们让第一个调试助手发送0~9十个阿拉伯数字,第二个发送字符串:hello wiznet,可以看到串口打印收到不同客户端的数据,而且调试助手也分别收到了相对应的数据回传。如下图所示:
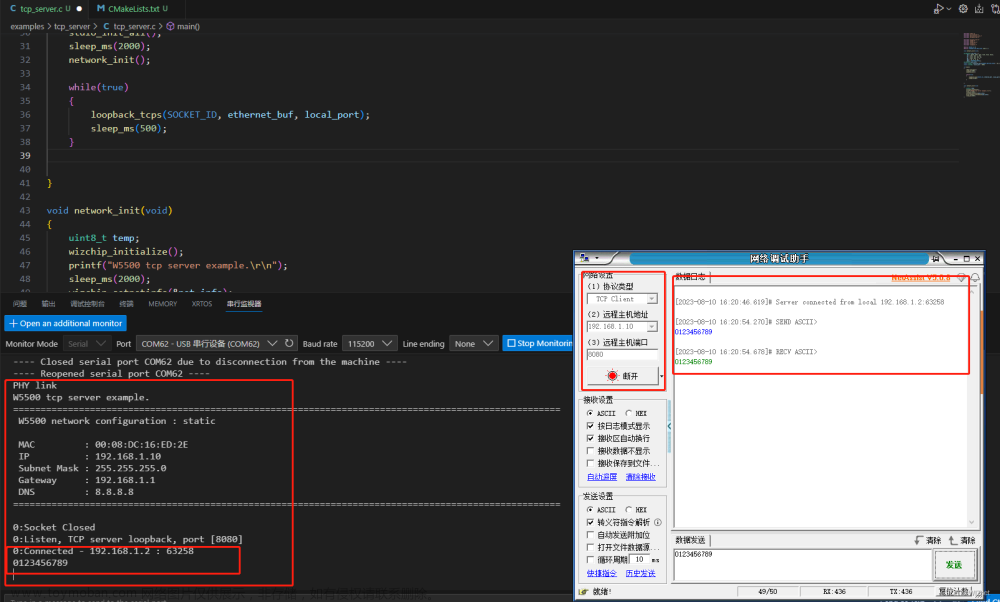
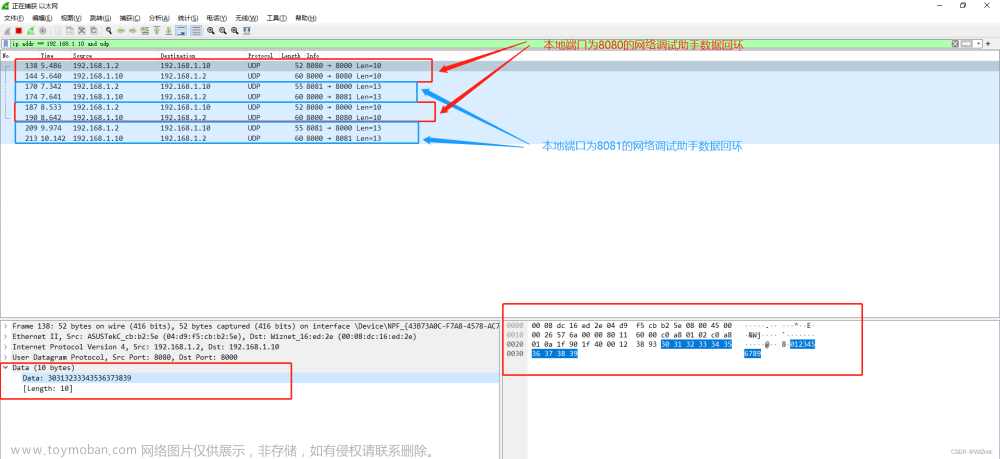
我们可以打开wireshark抓包工具,输入命令<ip.addr == 192.168.1.10 and udp>过滤数据包(IP地址改成自己电脑的IP或者开发板的IP地址即可);然后两个调试助手依次发送,可以到抓到的数据包。如下图所示:
 文章来源:https://www.toymoban.com/news/detail-647463.html
文章来源:https://www.toymoban.com/news/detail-647463.html
相关链接
本章相关例程https://gitee.com/wiznet-hk/w5100s-evb-pico-routine.git文章来源地址https://www.toymoban.com/news/detail-647463.html
到了这里,关于W5100S-EVB-PICO 做UDP Server进行数据回环测试(七)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!