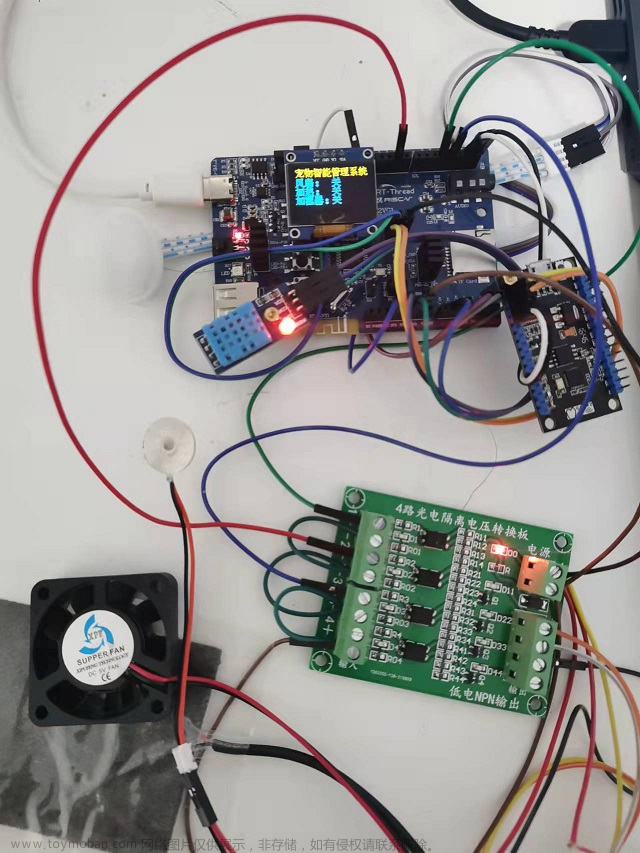
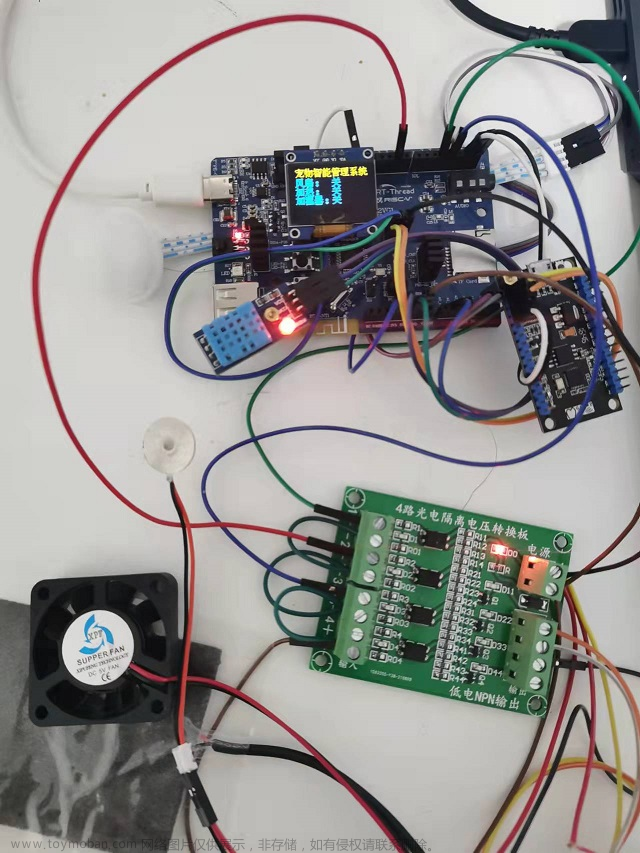
STM32通过串口与esp8266通讯收发DTH11的温湿度数据
文章目录
- 系列文章目录
- 前言
- 一、pandas是什么?
-
二、使用步骤
- 1.引入库
- 2.读入数据
- 总结
前言
这个项目学习了这几块内容:stm32的串口中断,定时器中断,时间片轮询机制,esp8266,DTH11温湿度传感器的使用。对串口通信收发数据的处理。
设计知识点:串口的格式化打印。DWT内核精确延时。sysTick延时。
一、DTH11介绍
- DTH11是串行接口,单线双向。一次一次完整的数据传输为40bit,高位先出。
- 数据格式:8bit湿度整数数据+8bit湿度小数数据 +8bi温度整数数据+8bit温度小数数据 +8bit校验。数据传送正确时校验和数据等于“8bit湿度整数数据+8bit湿度小数数据 +8bi温度整数数据+8bit温度小数数据”所得结果的末8位。
- 通讯过程:总线空闲状态一直处于高电平。dth11处于低功耗状态。当主机开始发信号时,要先拉低总线18~30ms,再将总线拉高20~40us,再将总线切换为输入模式,此时总线如果为低电平,说明DHT11发送响应信号,DHT11发送响应信号后,再把总线拉 高80us,准备发送数据,每一bit数据都以50us低电平时隙开始,高电平的长短定了数据位是0还是1。如果读取响应信号为高电平,则DHT11没有 响应,请检查线路是否连接正常.当最后一bit数据传送完毕后,DHT11拉低总线 50us,随后总线由上拉电阻拉高进入空闲状态。

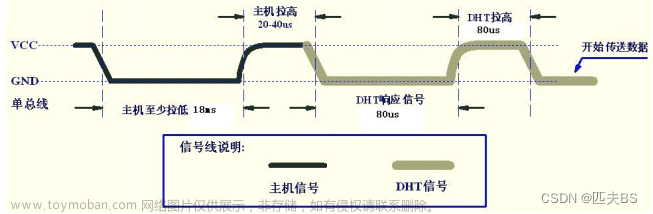
- 数字0信号
- 数字1信号
二、DTH11代码
引脚配置
static void DHT11_GPIO_Config ( void )
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启macDHT11_Dout_GPIO_PORT的外设时钟*/
macDHT11_Dout_SCK_APBxClock_FUN ( macDHT11_Dout_GPIO_CLK, ENABLE );
/*选择要控制的macDHT11_Dout_GPIO_PORT引脚*/
GPIO_InitStructure.GPIO_Pin = macDHT11_Dout_GPIO_PIN;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化macDHT11_Dout_GPIO_PORT*/
GPIO_Init ( macDHT11_Dout_GPIO_PORT, &GPIO_InitStructure );
}温湿度读取函数
通过 读取温度度,通过在头文件中定义了一个存储温湿度数据的结构体,这个结构体是局部变量保存在栈中,函数结束会被自动回收。
读取温度度,通过在头文件中定义了一个存储温湿度数据的结构体,这个结构体是局部变量保存在栈中,函数结束会被自动回收。
typedef struct
{
uint8_t humi_int; //湿度的整数部分
uint8_t humi_deci; //湿度的小数部分
uint8_t temp_int; //温度的整数部分
uint8_t temp_deci; //温度的小数部分
uint8_t check_sum; //校验和
} DHT11_Data_TypeDef;
驱动代码中用到的延时是比较时间戳来进行记时。
#define DHT11_DELAY_US(us) CPU_TS_Tmr_Delay_US(us)
#define DHT11_DELAY_MS(ms) CPU_TS_Tmr_Delay_MS(ms)
void CPU_TS_TmrInit(void)
{
/* 使能DWT外设 */
DEM_CR |= (uint32_t)DEM_CR_TRCENA;
/* DWT CYCCNT寄存器计数清0 */
DWT_CYCCNT = (uint32_t)0u;
/* 使能Cortex-M DWT CYCCNT寄存器 */
DWT_CR |= (uint32_t)DWT_CR_CYCCNTENA;
}
uint32_t CPU_TS_TmrRd(void)
{
return ((uint32_t)DWT_CYCCNT);
}
void CPU_TS_Tmr_Delay_US(__IO uint32_t us)
{
uint32_t ticks;
uint32_t told,tnow,tcnt=0;
/* 在函数内部初始化时间戳寄存器, */
#if (CPU_TS_INIT_IN_DELAY_FUNCTION)
/* 初始化时间戳并清零 */
CPU_TS_TmrInit();
#endif
ticks = us * (GET_CPU_ClkFreq() / 1000000); /* 需要的节拍数 */
tcnt = 0;
told = (uint32_t)CPU_TS_TmrRd(); /* 刚进入时的计数器值 */
while(1)
{
tnow = (uint32_t)CPU_TS_TmrRd();
if(tnow != told)
{
/* 32位计数器是递增计数器 */
if(tnow > told)
{
tcnt += tnow - told;
}
/* 重新装载 */
else
{
tcnt += UINT32_MAX - told + tnow;
}
told = tnow;
/*时间超过/等于要延迟的时间,则退出 */
if(tcnt >= ticks)break;
}
}
}static void DHT11_Mode_IPU(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/*选择要控制的macDHT11_Dout_GPIO_PORT引脚*/
GPIO_InitStructure.GPIO_Pin = macDHT11_Dout_GPIO_PIN;
/*设置引脚模式为浮空输入模式*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU ;
/*调用库函数,初始化macDHT11_Dout_GPIO_PORT*/
GPIO_Init(macDHT11_Dout_GPIO_PORT, &GPIO_InitStructure);
}
static void DHT11_Mode_Out_PP(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/*选择要控制的macDHT11_Dout_GPIO_PORT引脚*/
GPIO_InitStructure.GPIO_Pin = macDHT11_Dout_GPIO_PIN;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化macDHT11_Dout_GPIO_PORT*/
GPIO_Init(macDHT11_Dout_GPIO_PORT, &GPIO_InitStructure);
}
static uint8_t DHT11_ReadByte ( void )
{
uint8_t i, temp=0;
for(i=0;i<8;i++)
{
/*每bit以50us低电平标置开始,轮询直到从机发出 的50us 低电平 结束*/
while(macDHT11_Dout_IN()==Bit_RESET);
/*DHT11 以26~28us的高电平表示“0”,以70us高电平表示“1”,
*通过检测 x us后的电平即可区别这两个状 ,x 即下面的延时
*/
DHT11_DELAY_US(40); //延时x us 这个延时需要大于数据0持续的时间即可
if(macDHT11_Dout_IN()==Bit_SET)/* x us后仍为高电平表示数据“1” */
{
/* 等待数据1的高电平结束 */
while(macDHT11_Dout_IN()==Bit_SET);
temp|=(uint8_t)(0x01<<(7-i)); //把第7-i位置1,MSB先行
}
else // x us后为低电平表示数据“0”
{
temp&=(uint8_t)~(0x01<<(7-i)); //把第7-i位置0,MSB先行
}
}
return temp;
}
uint8_t DHT11_Read_TempAndHumidity(DHT11_Data_TypeDef *DHT11_Data)
{
/*输出模式*/
DHT11_Mode_Out_PP();
/*主机拉低*/
macDHT11_Dout_0;
/*延时18ms*/
DHT11_DELAY_MS(18);
/*总线拉高 主机延时30us*/
macDHT11_Dout_1;
DHT11_DELAY_US(30); //延时30us
/*主机设为输入 判断从机响应信号*/
DHT11_Mode_IPU();
/*判断从机是否有低电平响应信号 如不响应则跳出,响应则向下运行*/
if(macDHT11_Dout_IN()==Bit_RESET)
{
/*轮询直到从机发出 的80us 低电平 响应信号结束*/
while(macDHT11_Dout_IN()==Bit_RESET);
/*轮询直到从机发出的 80us 高电平 标置信号结束*/
while(macDHT11_Dout_IN()==Bit_SET);
/*开始接收数据*/
DHT11_Data->humi_int= DHT11_ReadByte();
DHT11_Data->humi_deci= DHT11_ReadByte();
DHT11_Data->temp_int= DHT11_ReadByte();
DHT11_Data->temp_deci= DHT11_ReadByte();
DHT11_Data->check_sum= DHT11_ReadByte();
/*读取结束,引脚改为输出模式*/
DHT11_Mode_Out_PP();
/*主机拉高*/
macDHT11_Dout_1;
/*检查读取的数据是否正确*/
if(DHT11_Data->check_sum == DHT11_Data->humi_int + DHT11_Data->humi_deci + DHT11_Data->temp_int+ DHT11_Data->temp_deci)
return SUCCESS;
else
return ERROR;
}
else
return ERROR;
}三、esp8266
1.GPIO初始化,USART初始化,NVIC中断
static void ESP8266_GPIO_Config ( void )
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/* 配置 CH_PD 引脚*/
macESP8266_CH_PD_APBxClock_FUN ( macESP8266_CH_PD_CLK, ENABLE );
GPIO_InitStructure.GPIO_Pin = macESP8266_CH_PD_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init ( macESP8266_CH_PD_PORT, & GPIO_InitStructure );
/* 配置 RST 引脚*/
macESP8266_RST_APBxClock_FUN ( macESP8266_RST_CLK, ENABLE );
GPIO_InitStructure.GPIO_Pin = macESP8266_RST_PIN;
GPIO_Init ( macESP8266_RST_PORT, & GPIO_InitStructure );
}
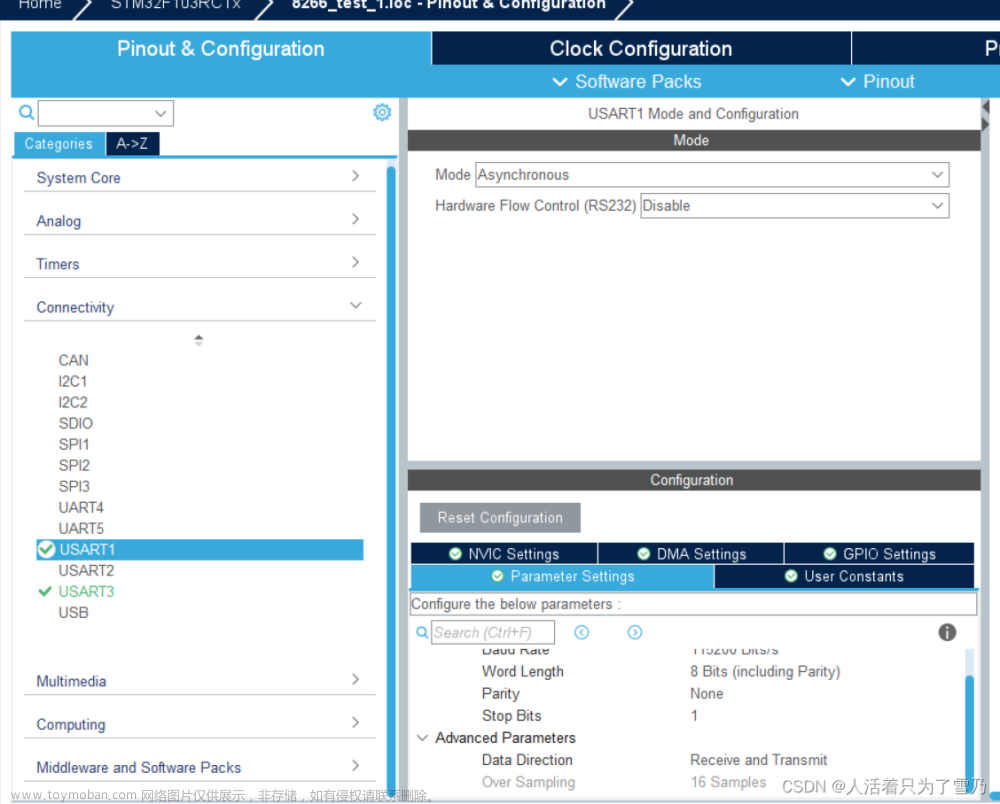
static void ESP8266_USART_Config ( void )
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* config USART clock */
macESP8266_USART_APBxClock_FUN ( macESP8266_USART_CLK, ENABLE );
macESP8266_USART_GPIO_APBxClock_FUN ( macESP8266_USART_GPIO_CLK, ENABLE );
/* USART GPIO config */
/* Configure USART Tx as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = macESP8266_USART_TX_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(macESP8266_USART_TX_PORT, &GPIO_InitStructure);
/* Configure USART Rx as input floating */
GPIO_InitStructure.GPIO_Pin = macESP8266_USART_RX_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(macESP8266_USART_RX_PORT, &GPIO_InitStructure);
/* USART1 mode config */
USART_InitStructure.USART_BaudRate = macESP8266_USART_BAUD_RATE;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(macESP8266_USARTx, &USART_InitStructure);
/* 中断配置 */
USART_ITConfig ( macESP8266_USARTx, USART_IT_RXNE, ENABLE ); //使能串口接收中断
USART_ITConfig ( macESP8266_USARTx, USART_IT_IDLE, ENABLE ); //使能串口总线空闲中断
ESP8266_USART_NVIC_Configuration ();
USART_Cmd(macESP8266_USARTx, ENABLE);
}
static void ESP8266_USART_NVIC_Configuration ( void )
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
NVIC_PriorityGroupConfig ( macNVIC_PriorityGroup_x );
/* Enable the USART2 Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = macESP8266_USART_IRQ;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}2.AT命令
串口收发结构体
#define RX_BUF_MAX_LEN 1024 //最大接收缓存字节数
extern struct STRUCT_USARTx_Fram //串口数据帧的处理结构体
{
char Data_RX_BUF [ RX_BUF_MAX_LEN ];
union {
__IO u16 InfAll;
struct {
__IO u16 FramLength :15; // 14:0
__IO u16 FramFinishFlag :1; // 15
} InfBit;
};
} strEsp8266_Fram_Record;
Data_RX_BUF: 字符数组,用于存储接收的数据帧内容,长度为 RX_BUF_MAX_LEN,即 1024 字节。
InfAll: 16 位无符号整数,用于访问结构体中所有位字段。
InfBit: 位字段联合,包含两个成员:
FramLength: 15 位,表示数据帧的长度,范围为 0-32767。
FramFinishFlag: 1 位,表示数据帧接收完毕的标志。
结构体定义后,通过 strEsp8266_Fram_Record 声明一个全局变量,该变量的类型是 STRUCT_USARTx_Fram 结构体,用于在程序中存储和处理串口数据帧。
可以使用该结构体和其成员变量来进行串口数据帧的接收、处理和访问。例如,可以通过 strEsp8266_Fram_Record.Data_RX_BUF 来访问接收到的数据帧内容,通过 strEsp8266_Fram_Record.InfBit.FramLength 来获取数据帧的长度,通过 strEsp8266_Fram_Record.InfBit.FramFinishFlag 来判断数据帧是否接收完毕。ESP8266_Cmd是PC端用串口给ESP8266发送数据。发送AT命令并且打印esp8266接收到的数据到PC串口。reply1,reply2为AT指令。
bool ESP8266_Cmd ( char * cmd, char * reply1, char * reply2, u32 waittime )
{
strEsp8266_Fram_Record .InfBit .FramLength = 0; //从新开始接收新的数据包
macESP8266_Usart ( "%s\r\n", cmd );
if ( ( reply1 == 0 ) && ( reply2 == 0 ) ) //不需要接收数据
return true;
Delay_ms ( waittime ); //延时
strEsp8266_Fram_Record .Data_RX_BUF [ strEsp8266_Fram_Record .InfBit .FramLength ] = '\0';
macPC_Usart ( "%s", strEsp8266_Fram_Record .Data_RX_BUF );
strEsp8266_Fram_Record .InfBit .FramLength = 0; //清除接收标志
strEsp8266_Fram_Record.InfBit.FramFinishFlag = 0;
if ( ( reply1 != 0 ) && ( reply2 != 0 ) )
return ( ( bool ) strstr ( strEsp8266_Fram_Record .Data_RX_BUF, reply1 ) ||
( bool ) strstr ( strEsp8266_Fram_Record .Data_RX_BUF, reply2 ) );
else if ( reply1 != 0 )
return ( ( bool ) strstr ( strEsp8266_Fram_Record .Data_RX_BUF, reply1 ) );
else
return ( ( bool ) strstr ( strEsp8266_Fram_Record .Data_RX_BUF, reply2 ) );
}USART_printf是通过调用USART_SendData。文章来源:https://www.toymoban.com/news/detail-649022.html
void USART_printf ( USART_TypeDef * USARTx, char * Data, ... )
{
const char *s;
int d;
char buf[16];
va_list ap;
va_start(ap, Data);
while ( * Data != 0 ) // 判断是否到达字符串结束符
{
if ( * Data == 0x5c ) //'\'
{
switch ( *++Data )
{
case 'r': //回车符
USART_SendData(USARTx, 0x0d);
Data ++;
break;
case 'n': //换行符
USART_SendData(USARTx, 0x0a);
Data ++;
break;
default:
Data ++;
break;
}
}
else if ( * Data == '%')
{ //
switch ( *++Data )
{
case 's': //字符串
s = va_arg(ap, const char *);
for ( ; *s; s++)
{
USART_SendData(USARTx,*s);
while( USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET );
}
Data++;
break;
case 'd':
//十进制
d = va_arg(ap, int);
itoa(d, buf, 10);
for (s = buf; *s; s++)
{
USART_SendData(USARTx,*s);
while( USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET );
}
Data++;
break;
default:
Data++;
break;
}
}
else USART_SendData(USARTx, *Data++);
while ( USART_GetFlagStatus ( USARTx, USART_FLAG_TXE ) == RESET );
}
}中断串口服务函数是从ESP8266接收响应。接收到的数据存放到strEsp8266_Fram_Record结构体中。文章来源地址https://www.toymoban.com/news/detail-649022.html
extern struct STRUCT_USARTx_Fram //串口数据帧的处理结构体
{
char Data_RX_BUF [ RX_BUF_MAX_LEN ];
union {
__IO u16 InfAll;
struct {
__IO u16 FramLength :15; // 14:0
__IO u16 FramFinishFlag :1; // 15
} InfBit;
};
} strEsp8266_Fram_Record;
void macESP8266_USART_INT_FUN ( void )
{
uint8_t ucCh;
if ( USART_GetITStatus ( macESP8266_USARTx, USART_IT_RXNE ) != RESET )
{
ucCh = USART_ReceiveData( macESP8266_USARTx );
if ( strEsp8266_Fram_Record .InfBit .FramLength < ( RX_BUF_MAX_LEN - 1 ) ) //预留1个字节写结束符
strEsp8266_Fram_Record .Data_RX_BUF [ strEsp8266_Fram_Record .InfBit .FramLength ++ ] = ucCh;
}
if ( USART_GetITStatus( macESP8266_USARTx, USART_IT_IDLE ) == SET ) //数据帧接收完毕
{
strEsp8266_Fram_Record .InfBit .FramFinishFlag = 1;
ucCh = USART_ReceiveData( macESP8266_USARTx ); //由软件序列清除中断标志位(先读USART_SR,然后读USART_DR)
ucTcpClosedFlag = strstr ( strEsp8266_Fram_Record .Data_RX_BUF, "CLOSED\r\n" ) ? 1 : 0; //获取连接状态
}
}总结
到了这里,关于【开源项目自学笔记】STM32与ESP8266通讯的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!