标题串口、TTL、UART、RS232、RS422、RS485、CAN、CAN FD的定义、工作原理和它们之间的区别
串口是计算机与外部设备之间通过串行通信接口进行数据传输和控制的方式。常见的串口协议包括TTL、UART、RS232、RS422、RS485、CAN、CAN FD等。这些协议之间的定义、工作原理和区别如下:
-
TTL(Transistor-Transistor Logic)串口协议是一种数字电平标准,工作电平为0V和5V,适用于短距离数据传输和控制,例如在单片机和传感器之间进行通信。
-
UART(Universal Asynchronous Receiver/Transmitter)串口协议是一种通用异步收发器,通过设置波特率和数据位等参数来控制数据传输。UART串口协议常见于计算机和外设之间的通信。
-
RS232(Recommended Standard 232)串口协议是一种广泛使用的异步串口标准,常见于计算机和设备之间的通信,工作电平为正负12V。RS232串口协议具有高可靠性和抗干扰能力。
-
RS422(Recommended Standard 422)串口协议是一种双向平衡线驱动器,适用于长距离数据传输和控制,最高传输速率可达10Mbps。RS422串口协议具有抗干扰性能强、传输距离长等优点。
-
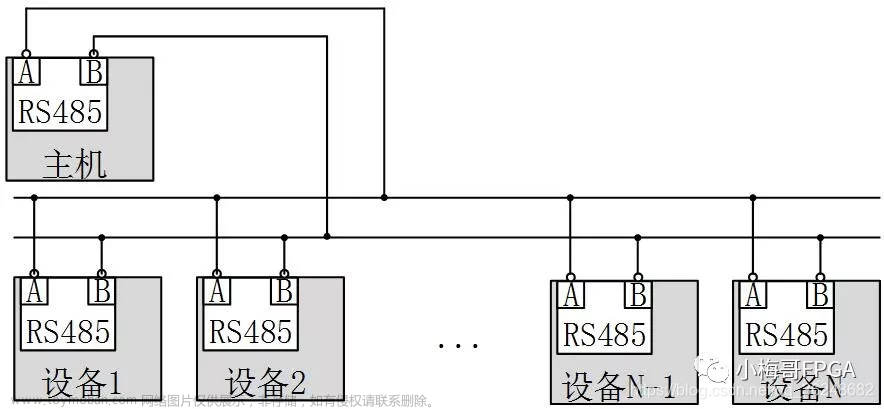
RS485(Recommended Standard 485)串口协议是一种半双工平衡线驱动器,适用于多节点通信系统,最高传输速率可达10Mbps。RS485串口协议具有抗干扰性能强、传输距离长、节点数量多等优点。
-
CAN(Controller Area Network)协议是一种广泛应用于汽车和工业控制领域的串口协议,具有高速传输、抗干扰性能强等优点。CAN协议通过数据帧的形式进行数据传输和控制。
-
CAN FD(Flexible Data-Rate)协议是CAN协议的升级版,可以实现更高的传输速率和更大的数据传输量,适用于对传输速率和数据量要求更高的应用场景。文章来源:https://www.toymoban.com/news/detail-649181.html
这些串口协议之间的区别主要在于工作电平、传输距离、传输速率、节点数量、抗干扰性能等方面。不同的应用场景需要选择不同的串口协议。例如,对于短距离、低速率、单节点的应用,可以选择TTL或UART协议;对于长距离、高速率、多节点的应用,可以选择RS422或RS485协议;对于汽车和工业控制领域,则需要选择CAN协议。而CAN FD协议则更适用于对传输速率和数据量要求更高的应用场景。文章来源地址https://www.toymoban.com/news/detail-649181.html
到了这里,关于串口、TTL、UART、RS232、RS422、RS485、CAN、CAN FD的定义、工作原理和它们之间的区别的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!