目录
1.实验目的
2.实验效果
3.理论部分
3.1时钟源
3.2时基单元
3.3输入捕获
4.程序流程
4.1GPIO初始化结构体
4.2时基初始化结构体
4.3输出比较结构体
4.4刹车和死区结构体的初始化
5.程序源码
1.实验目的
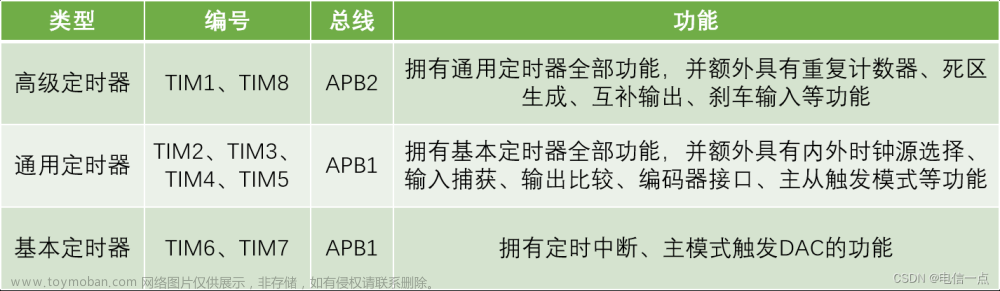
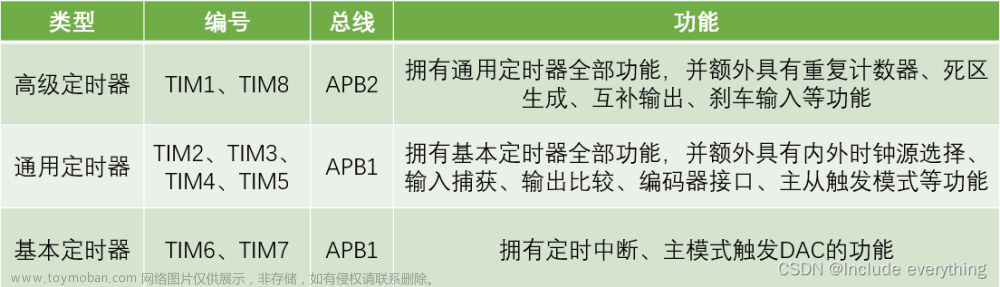
使用高级定时器,输出两路互补的PWM输出,需要有带死区和不带死区两种情况
2.实验效果

图1:不带死区的两路互补的PWM输出

图2 :带死区的两路互补的PWM输出
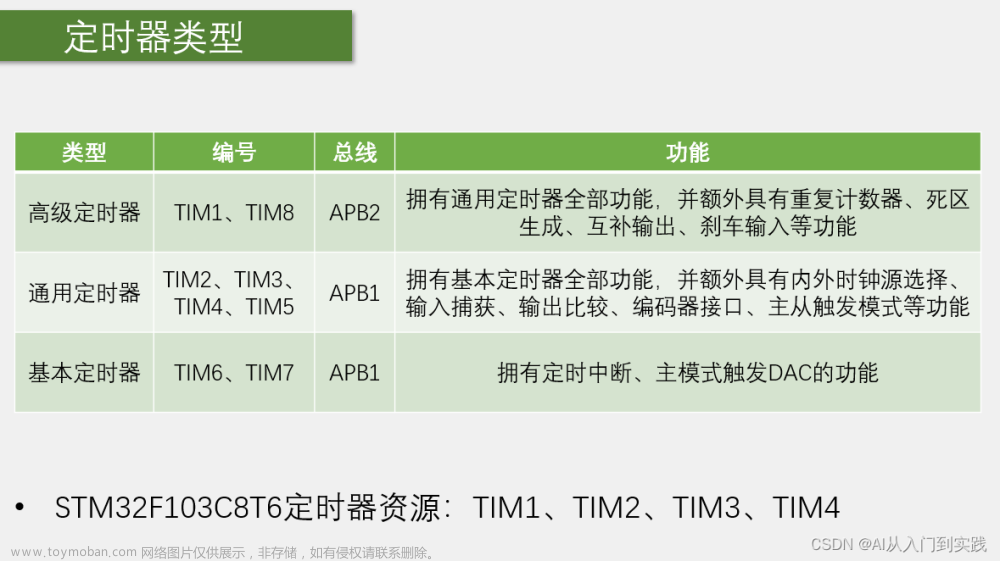
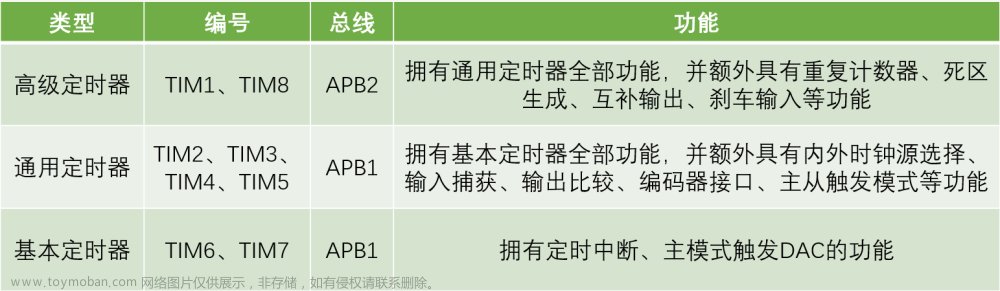
3.理论部分
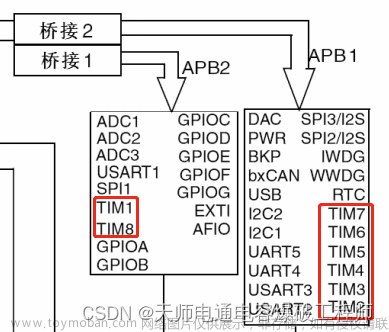
3.1时钟源
内部时钟(基本定时器,通用定时器时钟源来自PCLK1,但高级定时器的时钟源来自PCLK2(72M))

实践中几乎无需使用:外部时钟模式1、外部时钟模式2
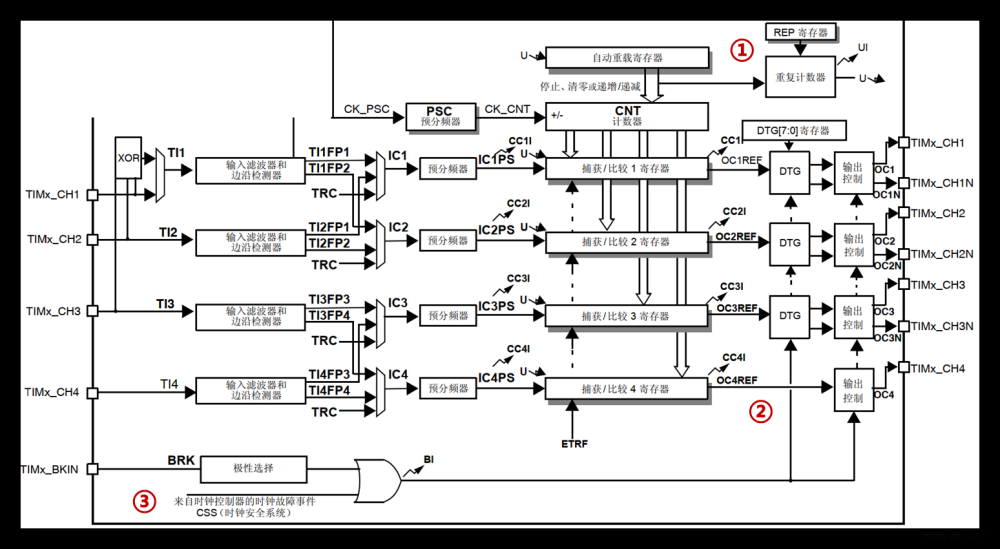
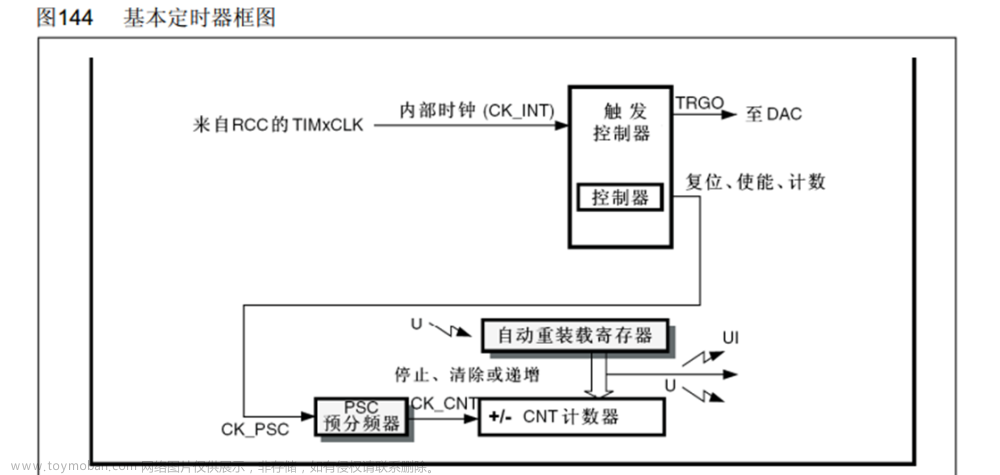
3.2时基单元
组成:
- 16bit预分频PSC
16bit计数器CNT
8bit重复计数器RCR(高级定时器独有)
16bit自动重装载寄存器ARR
3.3输入捕获
作用:对输入信号的上升沿/下降沿/双边沿进行捕获,测量输入信号的脉宽,和测量PWM的频率,占空比
原理:当捕捉到信号的跳变沿时,将CNT的值所存到捕获寄存器CCR中,然后把两次的值相减,就可以得到脉宽或者频率。
若脉宽时长超过你定时的时长,那么就溢出,此时我们就需要作额外的处理
PWM输入的情况下,只有CH1,CH2可以同时测量周期和占空比,因为只有TI1FP1,TI2FP2可以触发从模式控制器。选谁作从模式控制器的触发测量的就是周期,剩下的一个寄存器就测量占空比。但是单纯测量PWM的一个周期或占空比,可用四路

4.程序流程
4.1GPIO初始化结构体

输出PWM需用复用推挽输出(GPIO_AF_PP)
1、浮空输入GPIO_IN_FLOATING ——浮空输入,可以做KEY识别,RX1
2、带上拉输入GPIO_IPU——IO内部上拉电阻输入
3、带下拉输入GPIO_IPD—— IO内部下拉电阻输入
4、模拟输入GPIO_AIN ——应用ADC模拟输入,或者低功耗下省电
5、开漏输出GPIO_OUT_OD ——IO输出0接GND,IO输出1,悬空,需要外接上拉电阻,才能实现输出高电平。
当输出为1时,IO口的状态由上拉电阻拉高电平,但由于是开漏输出模式,这样IO口也就可以由外部电路改变为
低电平或不变。可以读IO输入电平变化,实现C51的IO双向功能
6、推挽输出GPIO_OUT_PP ——IO输出0-接GND, IO输出1 -接VCC,读输入值是未知的
7、复用功能的推挽输出GPIO_AF_PP ——片内外设功能(I2C的SCL,SDA)
8、复用功能的开漏输出GPIO_AF_OD——片内外设功能(TX1,MOSI,MISO.SCK.SS)
4.2时基初始化结构体

typedef struct
{
uint16_t TIM_Prescaler; //预分频器
uint16_t TIM_CounterMode; //定时器的计数方式
uint16_t TIM_Period; //定时器的周期
uint16_t TIM_ClockDivision; //时钟分频因子
uint8_t TIM_RepetitionCounter; //配置重复计数器,仅高级定时器需要
} TIM_TimeBaseInitTypeDef;
定时器的计数方式
向上计数(基本定时器仅有这一种)、向下计数、中心对齐计数
DIR=0,向上计数
DIR=1,向下计数
配置中心对齐需CMS和DIR寄存器配合使用
4.3输出比较结构体
typedef struct
{
uint16_t TIM_OCMode; //比较输出模式选择
uint16_t TIM_OutputState; //比较输出使能
uint16_t TIM_OutputNState; //比较互补输出使能
uint16_t TIM_Pulse; //脉冲宽度
uint16_t TIM_OCPolarity; //输出极性
uint16_t TIM_OCNPolarity; //互补输出极性
uint16_t TIM_OCIdleState; //空闲状态下比较输出状态
uint16_t TIM_OCNIdleState; //空闲状态下比较互补输出状态
} TIM_OCInitTypeDef;
1.比较输出模式选择,总共有八种,常用的为 PWM1/PWM2。它设定CCMRx 寄存器 OCxM[2:0]位的值。
2.比较输出使能,决定最终的输出比较信号 OCx 是否通过外部引脚输出。它设定 TIMx_CCER 寄存器 CCxE/CCxNE 位的值。
3.TIM_OutputNState:比较互补输出使能,决定 OCx 的互补信号 OCxN 是否通过外部引脚输出。它设定 CCER 寄存器 CCxNE 位的值。
4.比较输出脉冲宽度,实际设定比较寄存器 CCR 的值,决定脉冲宽度。可设置范围为 0 至 65535。设置脉冲即可设置占空比
5.比较输出极性,可选 OCx 为高电平有效或低电平有效。它决定着定时器通道有效电平。它设定 CCER 寄存器的 CCxP 位的值。可设置占空比由高电平决定
6.比较互补输出极性,可选 OCxN 为高电平有效或低电平有效。它设定 TIMx_CCER 寄存器的 CCxNP 位的值。
7.空闲状态时通道输出电平设置,可选输出 1 或输出 0,即在空闲状态(BDTR_MOE 位为 0)时,经过死区时间后定时器通道输出高电平或低电平。它设定CR2 寄存器的 OISx 位的值。
8.空闲状态时互补通道输出电平设置,可选输出 1 或输出 0,即在空闲状态(BDTR_MOE 位为 0)时,经过死区时间后定时器互补通道输出高电平或低电平,设定值必须与 TIM_OCIdleState 相反。它设定是 CR2 寄存器的 OISxN 位的值。
4.4刹车和死区结构体的初始化
static void AdvancedTIM_BDTR_Init()
{
TIM_BDTRInitTypeDef TIM_BDTRInitStructure;
TIM_BDTRInitStructure.TIM_OSSIState=TIM_OSSIState_Enable;//空闲模式下的关闭状态选择
TIM_BDTRInitStructure.TIM_OSSRState=TIM_OSSRState_Enable;//运行模式下的关闭状态选择
TIM_BDTRInitStructure.TIM_LOCKLevel=TIM_LOCKLevel_1;//锁存配置
TIM_BDTRInitStructure.TIM_DeadTime=11;//死区时间
TIM_BDTRInitStructure.TIM_Break=TIM_Break_Enable;//断路输入使能控制
TIM_BDTRInitStructure.TIM_BreakPolarity=TIM_BreakPolarity_High;//断路输入极性
TIM_BDTRInitStructure.TIM_AutomaticOutput=TIM_AutomaticOutput_Enable;//自动输出极性
TIM_BDTRConfig(Advanced_TIM,&TIM_BDTRInitStructure);
}死区时间的计算可以看看博客,讲解的也是非常详细的,对此不再赘述
这个结构体,你只需关心 TIM_BDTRInitStructure.TIM_DeadTime=11 即可文章来源:https://www.toymoban.com/news/detail-649602.html
5.程序源码
高级定时器-两路互补的PWM输出(带死区和刹车控制)文章来源地址https://www.toymoban.com/news/detail-649602.html
到了这里,关于STM32学习笔记(4) 高级定时器-两路互补的PWM输出(带死区和刹车控制)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!