北京航空航天大学是国家“双一流”建设高校,以建设扎根中国大地的世界一流大学为发展目标。北京航空航天大学在机器人领域一直处于行业前沿,以其亮眼的成果和优秀的师资力量,成为国内机器人领域的重要参与者和建设者。机器人操作系统是机器人的核心基础软件,支撑着机器人应用对系统实时性、安全性及智能化等方面的共性诉求。面向智能工业机器人领域,突破开放式体系架构,在实时系统内核、通信协议栈、运动控制库、集成开发工具等方面进行研究,打造“开箱即用”的机器人基础软件平台,推进机器人软件生态体系建设。
北京航空航天大学是国家“双一流”建设高校,以建设扎根中国大地的世界一流大学为发展目标。北京航空航天大学在机器人领域一直处于行业前沿,以其亮眼的成果和优秀的师资力量,成为国内机器人领域的重要参与者和建设者。机器人操作系统是机器人的核心基础软件,支撑着机器人应用对系统实时性、安全性及智能化等方面的共性诉求。面向智能工业机器人领域,突破开放式体系架构,在实时系统内核、通信协议栈、运动控制库、集成开发工具等方面进行研究,打造“开箱即用”的机器人基础软件平台,推进机器人软件生态体系建设。
解决方案
- 操作系统基于 openEuler 22.03 LTS 内核,支持 x86 系列平台,未来将支持 ARM 等平台。
- 面向智能工业机器人领域,提供优秀的操作系统内核实时性性,研发 EtherCAT 通信协议栈、运动控制核心组件、智能算法库以及集成开发环境,建立机器人基础软件平台。
- 面向具体典型应用场景提供复杂场景识别、智能化人机交互等功能拓展。



客户价值
- 操作系统内核实现良好的实时性,7*24 小时不间断运行最大中断时延 ≤10μs,满足 EtherCAT 的 ≤1ms 的通信周期需求;
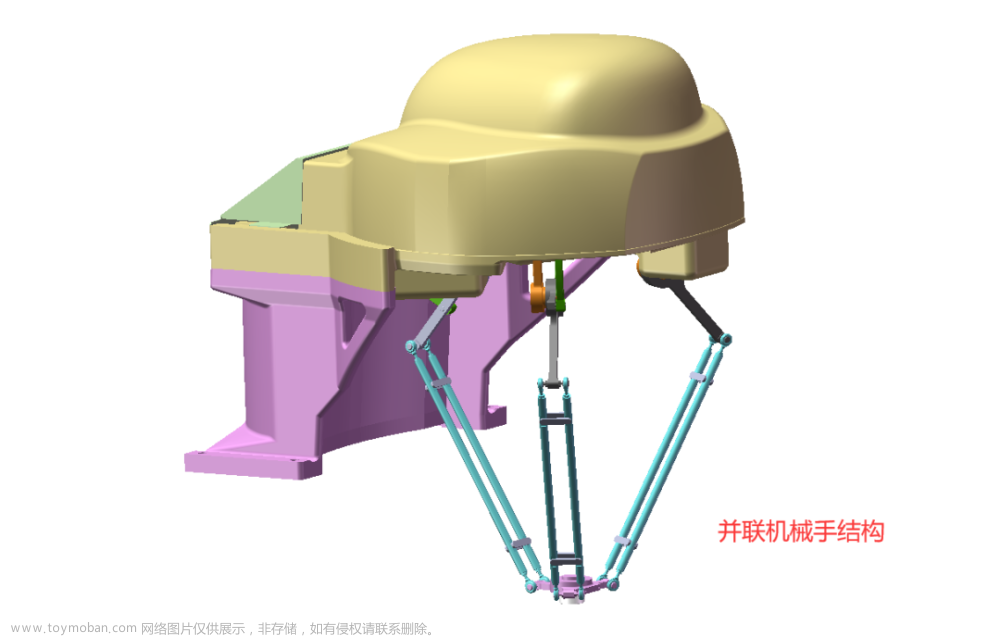
- 基于 openEuler 建立开放式嵌入式控制系统架构,驱动六轴工业机械臂正常运行,具有良好的兼容性和易用性;
- 面向典型行业应用已完成案例实施,系统可靠性在工业领域应用得到验证
用户案例征集文章来源:https://www.toymoban.com/news/detail-650736.html
openEuler用户案例持续征集中,如果您的项目有在应用openEuler操作系统或openEuler社区技术项目,欢迎联系user@openeuler.sh发布案例。文章来源地址https://www.toymoban.com/news/detail-650736.html
到了这里,关于北航基于openEuler构建工业机器人操作系统,打造“开箱即用”的机器人基础软件平台的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!