基于Python 和 OpenCV 画出多边形,以及判断某个点是不是在多边形内。
1、cv2.pointPolygonTest() 函数
函数定义:cv2.pointPolygonTest(contour, pt, measureDist)
函数功能:找到图像里的点和轮廓之间的最短距离. 它返回的距离当点在轮廓外的时候是负值,当点在轮廓内是正值,如果在轮廓上是0。
其中,contour 为轮廓多边形;pt 为坐标点;measureDist, 若为True,是找带符号的距离;若为False,会找点是否在内,外,或轮廓上(相应返回+1, -1, 0)。
测试用例:
import cv2
mask = cv2.imread(r"mask.jpg", 0)
mask[mask > 100] = 255
mask[mask != 255] = 0
cnts, _ = cv2.findContours(mask, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
print("mask info:", mask.shape, len(cnts))
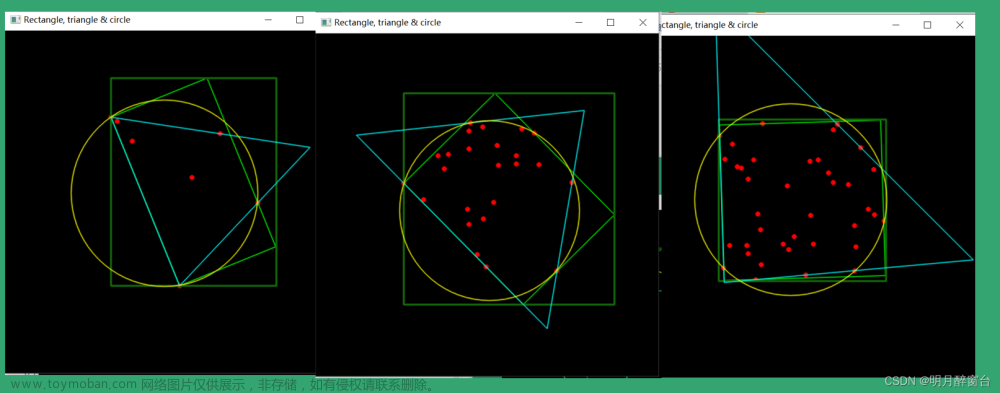
pt0 = (131, 104) # 外点, 红色
pt1 = (166, 157) # 轮廓上的点
pt2 = (260, 170) # 内点
img = cv2.cvtColor(mask, cv2.COLOR_GRAY2BGR)
img = cv2.circle(img, pt0, 2, (0, 0, 255), 2) # 红色
img = cv2.circle(img, pt1, 2, (0, 255, 0), 2) # 绿色
img = cv2.circle(img, pt2, 2, (255, 0, 0), 2) # 蓝色
dst0 = cv2.pointPolygonTest(cnts[0], pt0, 1)
dst1 = cv2.pointPolygonTest(cnts[0], pt1, 1)
dst2 = cv2.pointPolygonTest(cnts[0], pt2, 1)
print("dst:", dst0, dst1, dst2)
cv2.imwrite(r"ret.jpg", img)测试结果:
dst: -58.52 2.82 44.28图像:

2、cv2.polylines() 函数
函数定义:img = cv2.polylines(img, pts, isClosed, color, thickness, lineType, shift)
其中:
pts 是多边形定点构成的矩阵,将传入的点一次连接。
isClosed - 表示绘制的多边形是否闭合. 如闭合(True),则每个曲线的最后一个顶点到第一个顶点是连接的,若不闭合(False),则多边形就不闭合。
示例代码:
import cv2
import numpy as np
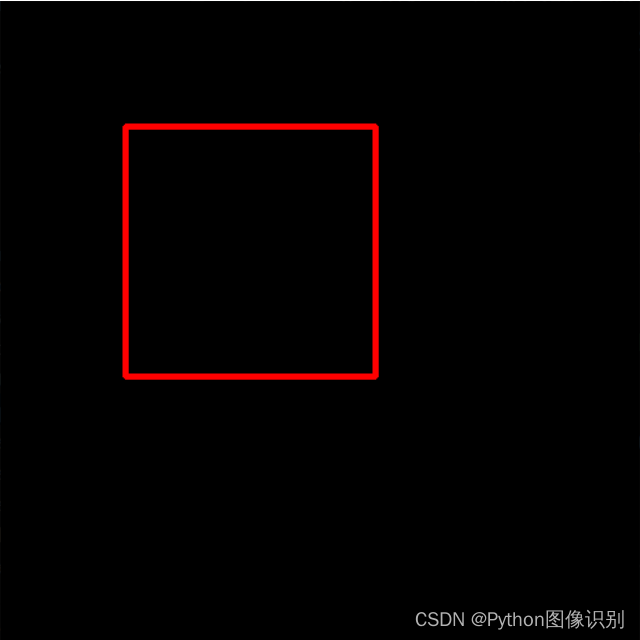
# 纯白图像
img = np.zeros((500, 500, 3), np.uint8)
img[:] = [255, 255, 255]
# 四个顶点坐标
pts = np.array([[100, 100], [200, 20], [370, 6], [450, 200]], np.int32)
# 顶点个数:4,矩阵变成4*1*2维
pts = pts.reshape((-1, 1, 2)) # (4,1,2)
cv2.polylines(img, [pts], isClosed=True, color=(0, 0, 255), thickness=3)
cv2.imwrite(r"a.jpg", img)结果:

3、关键代码
# 四个顶点坐标
pts = np.array([[100, 100], [200, 20], [370, 6], [450, 200]], np.int32)
# 顶点个数:4,矩阵变成4*1*2维
pts = pts.reshape((-1, 1, 2)) # (4,1,2)
# 画多边形
img = cv2.polylines(img, [pts], isClosed=True, color=(0, 0, 255), thickness=3)
# 测试点与多边形的距离
dist = cv2.pointPolygonTest(pts, (307, 100), True)扩展阅读:
1、opencv python 轮廓/凸缺陷/PointPolygonTest/形状匹配
opencv python 轮廓/凸缺陷/PointPolygonTest/形状匹配 - SegmentFault 思否
形状匹配:
OpenCV附带了一个函数cv2.matchShapes(),它使我们能够比较两个形状或两个轮廓,并返回一个显示相似性的度量。 结果越低,匹配就越好.它是根据hu-moment值计算的。
ret = cv2.matchShapes(cnt1,cnt2,1,0.0)
2、比好好的opencv专栏文章来源:https://www.toymoban.com/news/detail-651693.html
https://blog.csdn.net/kakiebu/category_7398390.html文章来源地址https://www.toymoban.com/news/detail-651693.html
到了这里,关于opencv 判断点在多边形内外的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!