基于蚁群优化的机器人避障算法仿真
随着机器人技术的发展,机器人的避障能力也变得越来越重要。蚁群优化算法是一种智能优化算法,具有全局搜索能力和强鲁棒性。本文将介绍如何使用ACO蚁群优化算法实现机器人的避障功能,并用Matlab进行仿真。
- 算法原理
蚁群优化算法是一种启发式搜索算法,其灵感来源于蚂蚁在寻找食物时留下的信息素。在算法中,每只蚂蚁通过感知环境的信息素含量,选择距离其当前位置最近的未访问节点,并在访问过程中增加信息素含量。同时,信息素也会随时间的推移逐渐挥发消失。这样,经过多次循环迭代,最终可以找到最优解。
在机器人避障算法中,我们可以将机器人看作是一只蚂蚁,其要避开的障碍物则是一些不可达节点。机器人通过感知周围环境的信息素含量(即各个方向的障碍物距离),选择距离其当前位置最近且没有障碍物的方向,并朝该方向移动。机器人在移动过程中也释放信息素,以便引导其他机器人找到更优的路径。
- 算法实现
具体而言,机器人避障算法可以分为以下几步:
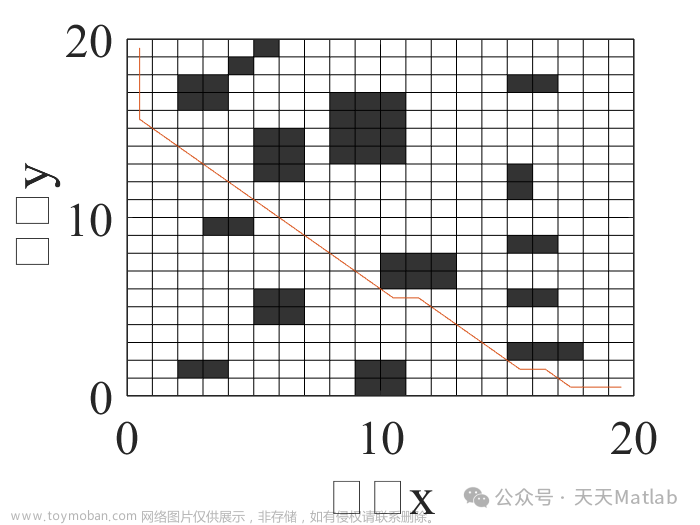
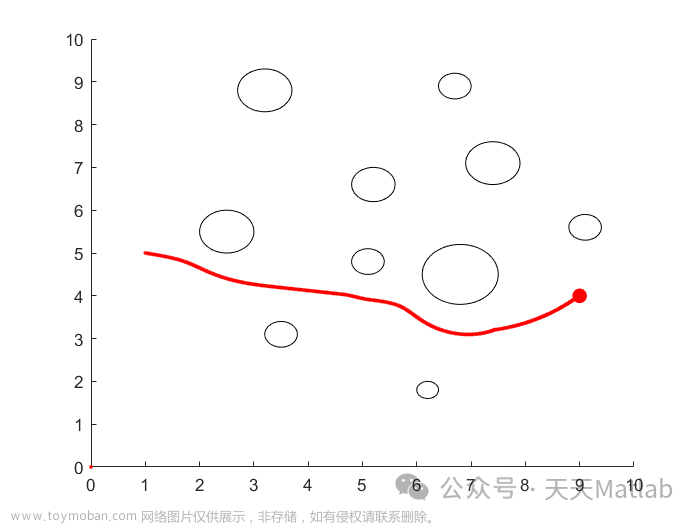
Step 1:初始化环境,包括机器人的起始位置、目标位置和障碍物信息。在Matlab中,我们可以通过绘制平面图形来模拟这个过程。
Step 2:初始化蚁群参数。包括信息素挥发系数、蚂蚁数量、迭代次数等。这些参数的选择对算法的性能有着重要影响,需要进行反复试验。
Step 3:对蚁群进行初始化。每只蚂蚁都有一个位置信息和一个禁忌表,用来记录已经走过的路径。蚂蚁按照概率选择下一步要走的方向,并在禁忌表中加入该节点,防止重复走过。文章来源:https://www.toymoban.com/news/detail-651845.html
Step 4:计算每只蚂蚁的路径长度,以及每个节点的信息素含量。路径长文章来源地址https://www.toymoban.com/news/detail-651845.html
到了这里,关于基于蚁群优化的机器人避障算法仿真的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!