准备电赛的过程中,尝试了几种测量频率的方法,也参考了一些博主,没有一种可以测量范围很广的方法,那就都尝试一下,需要什么就用什么吧。
下面的代码都是我运行成功的,可以测量
平台:stm32F407
外部中断(低频)
第一个想到的就是外部中断,也是最简单的方式,在每一个上升沿或者下降沿进入一次中断,定时统计进入中断的次数,即可算出频率,如果需要计算出占空比,可以在用另外一个定时器测量上升沿和下降沿的时间就可以啦,
下面贴出外部中断和定时器的代码,在低频时很不错,但是50KHZ之后太不行了,误差好大,频繁进入中断,只能测测低频啦
下面展示一些 内联代码片。
TIM4_Int_Init(10000-1,8400-1);//*外部中断测频率 PA0
// A code block
/**
* @brief 外部中断测频率
* @param
* @retval
*/
void TIM4_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE); ///使能TIM3时钟
TIM_TimeBaseInitStructure.TIM_Period = arr; //自动重装载值
TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //定时器分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM4,&TIM_TimeBaseInitStructure);//初始化TIM2
TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE); //允许定时器2更新中断
TIM_Cmd(TIM4,ENABLE); //使能定时器3
NVIC_InitStructure.NVIC_IRQChannel=TIM4_IRQn; //定时器3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x01; //抢占优先级1
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x03; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void TIM4_IRQHandler(void)
{
if(TIM_GetITStatus(TIM4,TIM_IT_Update)==SET) //溢出中断
{
LCD_ShowNum(60,60,freq,8,16);
freq=0;
}
TIM_ClearITPendingBit(TIM4,TIM_IT_Update); //清除中断标志位
}
// An highlighted block
//外部中断初始化程序
void EXTIX_Init(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
KEY_Init(); //按键对应的IO口初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);//使能SYSCFG时钟
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN;
GPIO_InitStructure.GPIO_Speed=GPIO_High_Speed;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN ;
GPIO_Init(GPIOA, &GPIO_InitStructure);
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource0);
/* 配置EXTI_Line0 */
EXTI_InitStructure.EXTI_Line = EXTI_Line0;//LINE0
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断事件
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising; //上升沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE;//使能LINE0
EXTI_Init(&EXTI_InitStructure);//配置
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;//外部中断0
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02;//抢占优先级2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;//子优先级2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能外部中断通道
NVIC_Init(&NVIC_InitStructure);//配置
}
//外部中断0服务程序
void EXTI0_IRQHandler(void)
{
// if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0) == 1){
// GPIO_ResetBits(GPIOA,GPIO_Pin_6 | GPIO_Pin_7);
// }
freq++;
EXTI_ClearITPendingBit(EXTI_Line0); //清除LINE0上的中断标志位
}
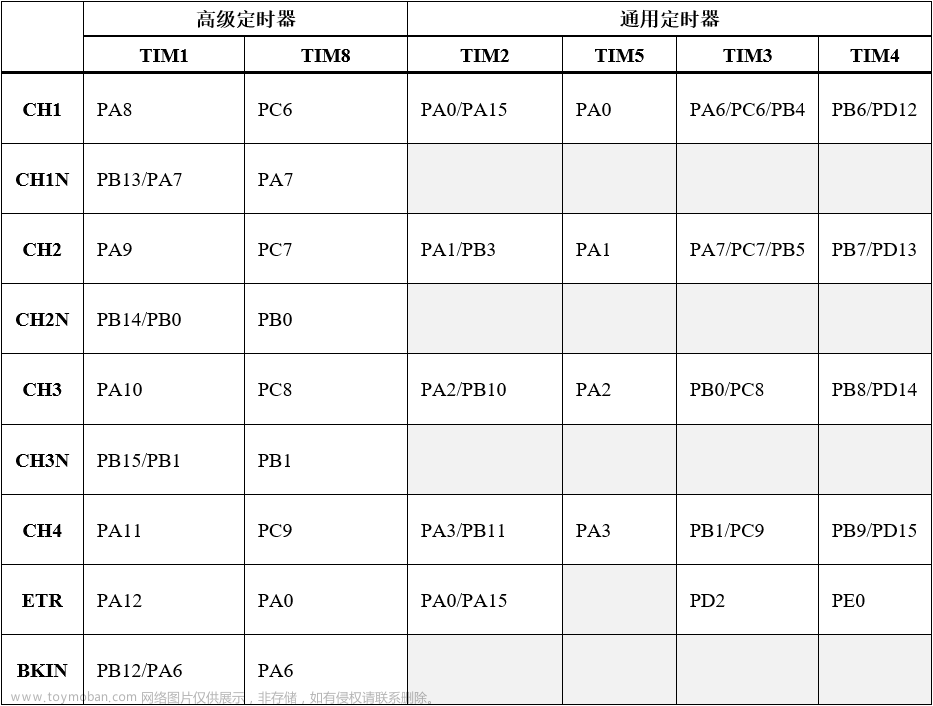
输入捕获模式(中高频)
既然是测频率,自然会想到定时器的输入捕获模式,本以为这个还不错,但是超过100KHZ误差就很大了,测中高频是可以的。
这个我参考了野火的程序
输入捕获可以对输入信号的上升沿、下降沿、双边沿进行捕获,用于测量脉宽、频率、占空比
当相应的 ICx 信号检测到跳变沿后,将使用捕获/比较寄存器(TIMx_CCRx)来锁存计数器的值。通过检测 TIMx_CHx 上的边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT)存放到对应的通道的捕获/比较寄存(TIMx_CCRx)里面,完成一次捕获。同时还可以配置捕获时是否触发中断/DMA 等。通过对上升沿下降沿捕获的值来计算需要的值
下面展示一些 内联代码片。
// TIM8_Configuration();//输入捕获模式测频率
// A code block
**
* @brief 定时器输入捕获模式
* @param
* @retval
*/
/**
* @brief 配置TIM复用输出PWM时用到的I/O
* @param 无
* @retval 无
*/
static void TIMx_GPIO_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启LED相关的GPIO外设时钟*/
RCC_AHB1PeriphClockCmd (GENERAL_OCPWM_GPIO_CLK, ENABLE);
RCC_AHB1PeriphClockCmd (ADVANCE_ICPWM_GPIO_CLK, ENABLE);
/* 定时器复用引脚 */
GPIO_PinAFConfig(GENERAL_OCPWM_GPIO_PORT,GENERAL_OCPWM_PINSOURCE,GENERAL_OCPWM_AF);
GPIO_PinAFConfig(ADVANCE_ICPWM_GPIO_PORT,ADVANCE_ICPWM_PINSOURCE,ADVANCE_ICPWM_AF);
/* 通用定时器PWM输出引脚 */
GPIO_InitStructure.GPIO_Pin = GENERAL_OCPWM_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_Init(GENERAL_OCPWM_GPIO_PORT, &GPIO_InitStructure);
/* 高级控制定时器PWM输入捕获引脚 */
GPIO_InitStructure.GPIO_Pin = ADVANCE_ICPWM_PIN;
GPIO_Init(ADVANCE_ICPWM_GPIO_PORT, &GPIO_InitStructure);
}
/**
* @brief 高级控制定时器 TIMx,x[1,8]中断优先级配置
* @param 无
* @retval 无
*/
static void TIMx_NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
// 设置中断组为0
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
// 设置中断来源
NVIC_InitStructure.NVIC_IRQChannel = ADVANCE_TIM_IRQn;
// 设置抢占优先级
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
// 设置子优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
}
static void TIM_PWMOUTPUT_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
// 开启TIMx_CLK,x[2,3,4,5,12,13,14]
RCC_APB1PeriphClockCmd(GENERAL_TIM_CLK, ENABLE);
/* 累计 TIM_Period个后产生一个更新或者中断*/
//当定时器从0计数到9999,即为10000次,为一个定时周期
TIM_TimeBaseStructure.TIM_Period = 10000-1;
// 通用定时器2时钟源TIMxCLK = HCLK/2=84MHz
// 设定定时器频率为=TIMxCLK/(TIM_Prescaler+1)=100KHz
TIM_TimeBaseStructure.TIM_Prescaler = 840-1;
// 采样时钟分频
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
// 计数方式
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
// 初始化定时器TIMx, x[1,8]
TIM_TimeBaseInit(GENERAL_TIM, &TIM_TimeBaseStructure);
/* PWM输出模式配置 */
/* 配置为PWM模式1 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
/* PWM脉冲宽度 */
TIM_OCInitStructure.TIM_Pulse = 3000-1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
/* 使能通道1 */
TIM_OC1Init(GENERAL_TIM, &TIM_OCInitStructure);
/*使能通道1重载*/
TIM_OC1PreloadConfig(GENERAL_TIM, TIM_OCPreload_Enable);
// 使能定时器
TIM_Cmd(GENERAL_TIM, ENABLE);
}
static void TIM_PWMINPUT_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
// 开启TIMx_CLK,x[1,8]
RCC_APB2PeriphClockCmd(ADVANCE_TIM_CLK, ENABLE);
TIM_TimeBaseStructure.TIM_Period = 0xFFFF-1;
// 高级控制定时器时钟源TIMxCLK = HCLK=168MHz
// 设定定时器频率为=TIMxCLK/(TIM_Prescaler+1)=100KHz
TIM_TimeBaseStructure.TIM_Prescaler = 168-1;
// 计数方式
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
// 初始化定时器TIMx, x[1,8]
TIM_TimeBaseInit(ADVANCE_TIM, &TIM_TimeBaseStructure);
/* IC1捕获:上升沿触发 TI1FP1 */
TIM_ICInitStructure.TIM_Channel = ADVANCE_IC1PWM_CHANNEL;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_PWMIConfig(ADVANCE_TIM, &TIM_ICInitStructure);
/* IC2捕获:下降沿触发 TI1FP2 */
TIM_ICInitStructure.TIM_Channel = ADVANCE_IC2PWM_CHANNEL;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Falling;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_IndirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_PWMIConfig(ADVANCE_TIM, &TIM_ICInitStructure);
/* 选择定时器输入触发: TI1FP1 */
TIM_SelectInputTrigger(ADVANCE_TIM, TIM_TS_TI1FP1);
/* 选择从模式: 复位模式 */
TIM_SelectSlaveMode(ADVANCE_TIM, TIM_SlaveMode_Reset);
TIM_SelectMasterSlaveMode(ADVANCE_TIM,TIM_MasterSlaveMode_Enable);
/* 使能高级控制定时器 */
TIM_Cmd(ADVANCE_TIM, ENABLE);
/* 使能捕获/比较2中断请求 */
TIM_ITConfig(ADVANCE_TIM, TIM_IT_CC1, ENABLE);
}
/**
* @brief 初始化高级控制定时器定时,1ms产生一次中断
* @param 无
* @retval 无
*/
void TIM8_Configuration(void)
{
TIMx_GPIO_Config();
TIMx_NVIC_Configuration();
TIM_PWMOUTPUT_Config();
TIM_PWMINPUT_Config();
printf("TIMx_Configuration_ok\n");
}
void ADVANCE_TIM_IRQHandler (void)
{
TIM_ClearITPendingBit(ADVANCE_TIM, TIM_IT_CC1);
IC1Value = TIM_GetCapture1(ADVANCE_TIM);
IC2Value = TIM_GetCapture2(ADVANCE_TIM);
//printf("IC1Value = %d IC2Value = %d ",IC1Value,IC2Value);
// LCD_ShowNum(0,60,IC1Value,8,16);
// LCD_ShowNum(70,70,IC1Value,8,16);
if (IC1Value != 0)
{
DutyCycle = (float)(IC2Value * 100) / IC1Value;
Frequency = 168000000/168/(float)IC1Value;
printf("占空比:%0.2f%% 频率:%0.2fHz\n",DutyCycle,Frequency);
LCD_ShowNum(10,20,DutyCycle,8,16);
LCD_ShowNum(60,40,Frequency,8,16);
}
else
{
DutyCycle = 0;
Frequency = 0;
}
}
// An highlighted block
void PWM1_Intput_Mode_Config(void);
/* 通用定时器PWM输出 */
/* PWM输出引脚 */
#define GENERAL_OCPWM_PIN GPIO_Pin_5
#define GENERAL_OCPWM_GPIO_PORT GPIOA
#define GENERAL_OCPWM_GPIO_CLK RCC_AHB1Periph_GPIOA
#define GENERAL_OCPWM_PINSOURCE GPIO_PinSource5
#define GENERAL_OCPWM_AF GPIO_AF_TIM2
/* 通用定时器 */
#define GENERAL_TIM TIM2
#define GENERAL_TIM_CLK RCC_APB1Periph_TIM2
/* 高级控制定时器PWM输入捕获 */
/* PWM输入捕获引脚 */
#define ADVANCE_ICPWM_PIN GPIO_Pin_6
#define ADVANCE_ICPWM_GPIO_PORT GPIOC
#define ADVANCE_ICPWM_GPIO_CLK RCC_AHB1Periph_GPIOC
#define ADVANCE_ICPWM_PINSOURCE GPIO_PinSource6
#define ADVANCE_ICPWM_AF GPIO_AF_TIM8
#define ADVANCE_IC1PWM_CHANNEL TIM_Channel_1
#define ADVANCE_IC2PWM_CHANNEL TIM_Channel_2
/* 高级控制定时器 */
#define ADVANCE_TIM TIM8
#define ADVANCE_TIM_CLK RCC_APB2Periph_TIM8
/* 捕获/比较中断 */
#define ADVANCE_TIM_IRQn TIM8_CC_IRQn
#define ADVANCE_TIM_IRQHandler TIM8_CC_IRQHandler
外部计数器模式(高频)
原本我还不知道有这种用法,后来看到有人这样用,真的能测到很高100khz-15Mhz误差0.01%——0.02%,频率过于大存在一定的误差,总体还不错。
外部计数器可以用于脉冲数计数
下面展示一些 内联代码片。文章来源:https://www.toymoban.com/news/detail-651951.html
// A code block
void TIM2_Cnt_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_DeInit(TIM2);
TIM_DeInit(TIM7);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2|RCC_APB1Periph_TIM7,ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //GPIOA0
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_25MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化PA0
GPIO_PinAFConfig(GPIOB,GPIO_PinSource3,GPIO_AF_TIM2);
TIM_TimeBaseStructure.TIM_Prescaler=0;
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Period=0xFFFFFFFF;
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);
TIM_TIxExternalClockConfig(TIM2,TIM_TIxExternalCLK1Source_TI2,TIM_ICPolarity_Rising,0);
TIM_TimeBaseStructure.TIM_Prescaler=18000-1;
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Period=1000-1;
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
NVIC_InitStructure.NVIC_IRQChannel = TIM7_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority =0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_ITConfig(TIM7,TIM_IT_Update,ENABLE);
TIM_Cmd(TIM7,ENABLE );
TIM_Cmd(TIM2,ENABLE );
}
u32 TIM7_LastCnt;
u32 TIM_ExtCntFreq;
//频率为TIM_ExtCntFreq
void TIM7_IRQHandler(void)
{
char str[32];
TIM_ExtCntFreq=(TIM2->CNT-TIM7_LastCnt)*(1/0.1);
// printf("%3.3f\n",TIM_ExtCntFreq/1.0/2.128);
TIM7_LastCnt=TIM2->CNT;
TIM_ClearITPendingBit(TIM7,TIM_IT_Update);
}
借鉴了一些别人的做法,从中学到了经验,非常感谢__,把自己的学习过程记录一下,也是一个巩固的好方法。如果有错误,请大家指正文章来源地址https://www.toymoban.com/news/detail-651951.html
到了这里,关于stm32 测频率(1HZ—15MHZ时精度0.01%,可测更高,但不是很准)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!