视频地址:1.基于STM32的超声波雷达-演示_哔哩哔哩_bilibili
备注:文档最后有所有文件的网盘地址

1. 项目展示
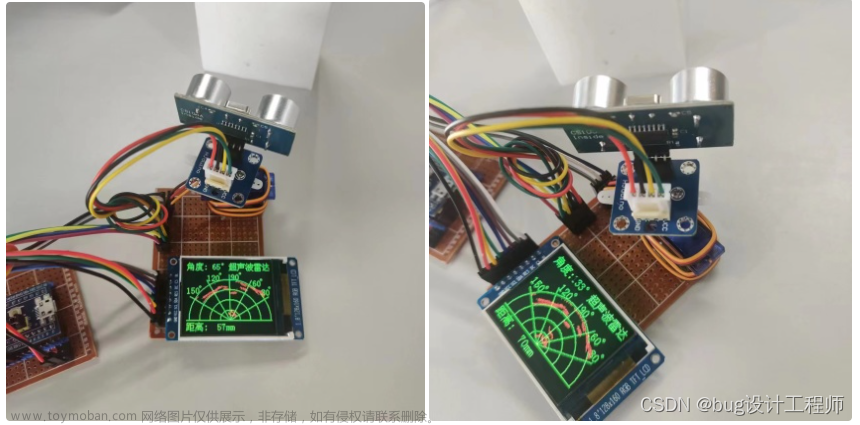
1.1. 最终效果
1.2. 项目硬件
全部必要硬件(左到右):
- ST-LINK调试器:调试下载程序
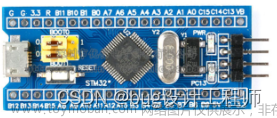
- stm32f103c8t6核心板
- 1.8寸TFT显示器
- sg90舵机
- 超声波传感器

其他扩展硬件
- 超声波传感器转接板:方便超声波传感器接到舵机上和接线而已。

- 自己焊接洞洞板(不是必要硬件,只是方便接线):同一排的引脚连通的,如标黄色的两个引脚是连接在一起的。(下面是正反面图)

- 另一个洞洞板,与上面一样不是必要硬件,只是方便接线
2. 方案设计
2.1. 需求分析
2.2. 方案设计

2.3. 外设型号
| 外设 |
型号 |
备注 |
| stm32主控芯片 |
stm32c8t6 |
|
| 超声波传感器 |
hc-sr04 |
|
| 舵机 |
sg90 |
|
| lcd显示屏 |
ST7735S 1.8寸 128*160tft lcd |
|



3. sg90舵机驱动

3.1. 简介
舵机的控制信号为周期是20ms 的脉宽调制(PWM)信号,其中脉冲宽度从0.5ms-2.5ms,相对应舵盘的位置为0—180度,呈线性变化。也就是说,给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,无论外界转矩怎样改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上。舵机内部有一个基准电路,产生周期20ms,宽度1.5ms的基准信号,有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。
舵机内部控制电路板接受来自信号线相应的PWM控制信号,进而控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。

GND :地线。
+5V :舵机电源,接5V,(3.3V也可正常工作)。
PWM:舵机控制引脚。
引脚一般可以根据线的颜色区分:棕色GND、红色VCC、黄色PWM
3.2. 原理
- 舵机是一种根据输入PWM信号占空比来控制输出角度的装置输入,将PWM当作通讯协议来使用
- PWM信号要求:周期为20ms(50HZ),高电平宽度为0.5ms~2.5ms(占空比范围)

3.3. 代码
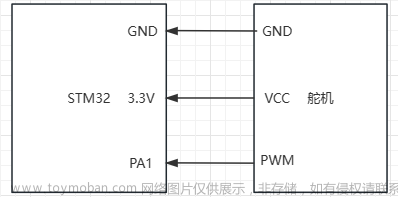
引脚连接关系:(PA1:定时器2的通道2)
核心代码:全部代码见文件夹工程
// 产生周期为20ms(50HZ),高电平宽度为0.5ms~2.5ms(占空比范围)
// ARR , PSC 可是多个值,
// ARR = 20000-1 PSC = 72-1;取这个值方便计算而已,其他值也可以
// 舵机电平要求0.5ms~2.5ms 既占空比:0.5ms/20ms = ccr/20000 ~ 2.5ms/20ms = ccr/20000
// ccr 500 ~ 2500
void pwm_init(void)
{
//1、打开时钟(TIM,GPIO)
//2、配置GPIO为复用推挽输出
//3、选择时钟源
//4、配置时基单元
//5、配置输出比较单元
//6、运行控制(启动定时器)
//1、打开时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); // TIM2在APB1总线
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // GPIOA在APB2总线
//2、配置GPIO为复用推挽输出
GPIO_InitTypeDef gpioInit;
gpioInit.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出(控制权给片上外设(定时器))
gpioInit.GPIO_Pin = GPIO_Pin_1;
gpioInit.GPIO_Speed = GPIO_Speed_50MHz; //一般设置50MHZ即可
GPIO_Init(GPIOA, &gpioInit);
//3、选择内部时钟
TIM_InternalClockConfig(TIM2);
//4、配置时基单元
TIM_TimeBaseInitTypeDef timeInit;
timeInit.TIM_ClockDivision = TIM_CKD_DIV1; // 外部时钟滤波单元的分频系数,没用,随便配置一个
timeInit.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数模式
timeInit.TIM_Period = 20000 - 1; // 重装值
timeInit.TIM_Prescaler = 72-1; // 分频值
timeInit.TIM_RepetitionCounter = 0; // 重复计数器(高级定时器才有)
TIM_TimeBaseInit(TIM2, &timeInit);
//5、配置输出比较单元
TIM_OCInitTypeDef ocInit;
TIM_OCStructInit(&ocInit); // 结构体初始化(没引用的成员赋默认值)
ocInit.TIM_OCMode = TIM_OCMode_PWM1; // 设置输出模式PWM1模式(先高电平,后低电平)
ocInit.TIM_OCPolarity = TIM_OCPolarity_High; // 设置输出比较的极性不翻转
ocInit.TIM_OutputState = TIM_OutputState_Enable; // 设置输出使能
ocInit.TIM_Pulse = 0; // 设置ccr的值(用于调节占空比)
TIM_OC2Init(TIM2, &ocInit); // 设置通道2输出PWM
//6、运行控制(启动定时器)
TIM_Cmd(TIM2, ENABLE);
}
/**
* @brief 设置pwm的占空比
*
* @param ccr 根据舵机要求计算:取500-2500
*/
void pwm_setCCR(uint16_t ccr)
{
TIM_SetCompare2(TIM2, ccr); // 修改通道2ccr的值,实现修改占空比
}
/**
* @brief 根据角度旋转舵机
* ccr取值500~2500 角度0~180
* 500~2500范围是2000; 0~180范围是180
* 等比例缩放 ccr/2000 = angle / 180
* ccr = angle / 180 *2000
* ccr是从500开始,所以还要再偏移500
* ccr = angle / 180 *2000 + 500
* @param angle 旋转角度
*
*/
void servo_setAngle(float angle)
{
uint16_t ccr;
ccr = angle / 180 *2000 + 500;
pwm_setCCR(ccr);
}最终效果图

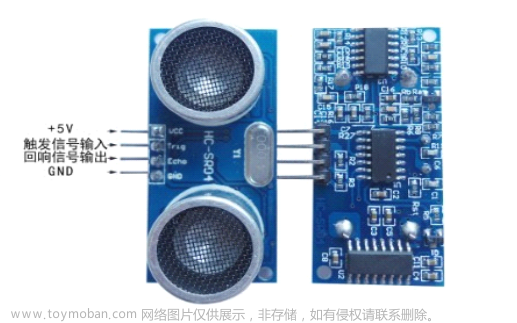
4. 超声波传感器驱动

4.1. 简介
HC-SR04超声波距离传感器的核心是两个超声波传感器。一个用作发射器,将电信号转换为40 KHz超声波脉冲。接收器监听发射的脉冲。如果接收到它们,它将产生一个输出脉冲,其宽度可用于确定脉冲传播的距离。
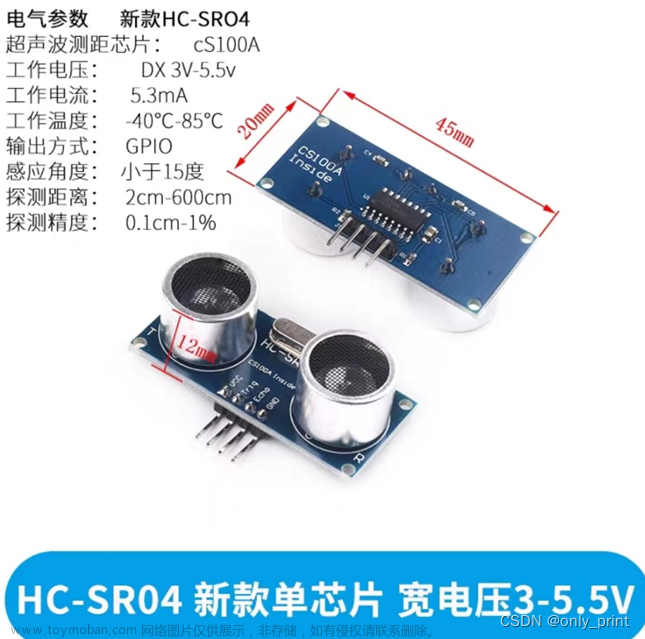
该传感器体积小,易于在任何机器人项目中使用,并提供2厘米至400厘米(约1英寸至13英尺)之间出色的非接触范围检测,精度为3mm,工作电压为5伏。
以下是完整的规格:
| 描述 |
参数 |
| Operating Voltage工作电压 |
直流3.3V---5V |
| Operating Current工作电流 |
15毫安 |
| Operating Frequency运行频率 |
40K赫兹 |
| Max Range最大范围 |
4m |
| Min Range最小范围 |
2厘米 |
| Ranging Accuracy测距精度 |
3毫米 |
| Measuring Angle测量角度 |
15度 |
| Trigger Input Signal触发输入信号 |
10µS TTL脉冲 |
| Dimension尺寸 |
45 x 20 x 15毫米 |

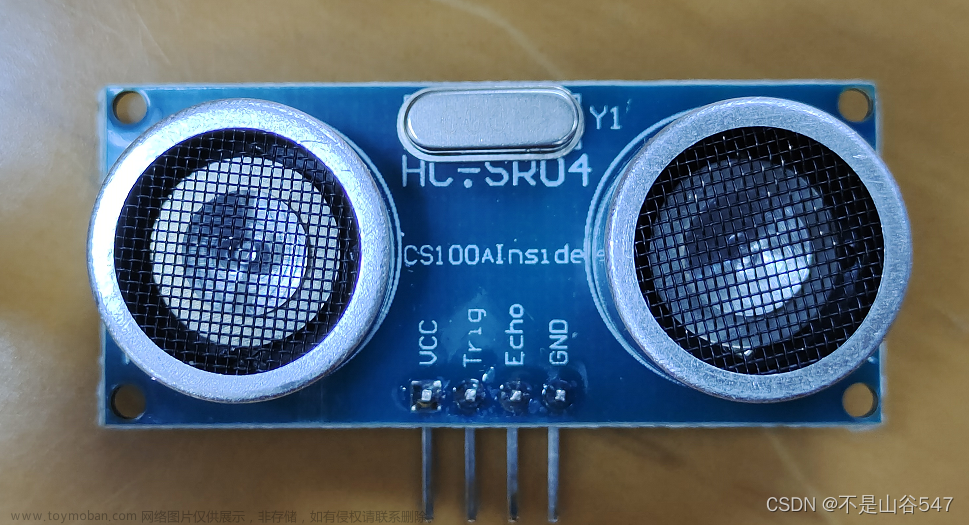
VCC :HC-SR04超声波距离传感器电源引脚,接5V。
Trig :(Trigger) 引脚用于触发超声波脉冲。
Echo :回声当接收到反射信号时,引脚产生一个脉冲。脉冲长度与检测发射信号所需时间成正比。
GND :地线。
4.2. 原理
- 采用IO口TRIG触发测距,给最少10us的高电平信号。
- 模块自动发送8个40khz的方波,自动检测是否有信号返回;
- 有信号返回, 通过IO口ECHO输出一个高电平, 高电平持续的时间就是超声波从发射到返回的时间。
- 测试距离=(高电平时间*声速(340M/S))/2

只要提供一个 10uS以上脉冲触发信号,该模块内部将发出8个 40kHz周期电平并检测回波。一旦检测到有回波信号则输出回响信号。回响信号的脉冲宽度与所测的距离成正比。 由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。
公式: uS/58=厘米或者uS/148=英寸; 或是: 距离=高电平时间*声速( 340M/S) /2;
建议测量周期为 60ms以上, 以防止发射信号对回响信号的影响
4.3. 代码
stm32和超声波传感器引脚连接关系:(PB6为定时器4通道1)

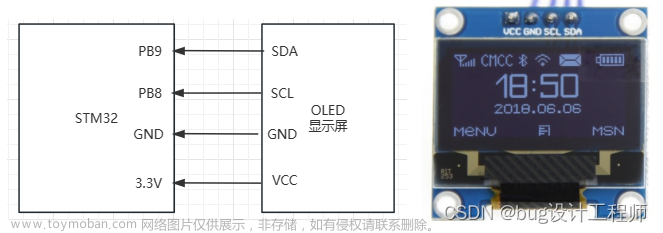
stm32和OLED显示屏引脚连接关系:(OLED调试超声波传感器需要用到)
核心代码:全部代码见文件夹工程
//返回超声波毫米值
uint32_t hcsr04_getValueMm(void)
{
uint32_t dist, distMm;
static uint64_t timeEnd;
//触发超声波测量
GPIO_WriteBit(GPIOB,TRIG_PIN,Bit_SET); //Trig输出高电平
delay_us(15); //保持15微秒生效
GPIO_WriteBit(GPIOB,TRIG_PIN,Bit_RESET); //Trig输出低电平
while((GPIO_ReadInputDataBit(GPIOB,ECHO_PIN) == 0)); //等待低电平结束,开始测量
g_time = 0; //计时清零
while(GPIO_ReadInputDataBit(GPIOB,ECHO_PIN) == 1); //等待高电平结束,测量结束
timeEnd = g_time;
if(timeEnd/100 < 38) //判断是否小于38毫秒,大于38毫秒的就是超时,直接跳到下面返回0
{
dist=(timeEnd*346) / 2; //计算距离,25°C空气中的音速为346m/s
distMm=dist/100; //timeEnd单位是10微秒,得出单位为毫米的距离结果,还得除以100
}else
{
distMm=0;
}
return distMm;
}
//中断服务函数,回波计时,每10微秒g_time加1
void TIM4_IRQHandler(void)
{
if (TIM_GetITStatus(TIM4, TIM_IT_Update) == SET) //获取TIM2定时器的更新中断标志位
{
g_time++;
TIM_ClearITPendingBit(TIM4, TIM_IT_Update); //清除更新中断标志位
}
}
//定时器4初始化
//定时10us,提供超声波测量时间
//定时器4中断服务函数再drv_sr04.c
void time4_init(void)
{
//1、RCC开启时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
//2、选择时基单元的时钟源
TIM_InternalClockConfig(TIM4); //选择内部时钟(不写也行,默认就是内部时钟)
//3、配置时基单元
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; //外部时钟滤波单元的分频系数,没用,随便配置一个就行
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
//频率 = CK_PSC / (PSC + 1) / (ARR + 1) CK_PSC=72MHZ
//时间=1/频率 72MHZ/72/10 ===》 10us
TIM_TimeBaseInitStruct.TIM_Prescaler = 72-1; //分频值
TIM_TimeBaseInitStruct.TIM_Period = 10-1; //周期,ARR自动重装器的值
TIM_TimeBaseInitStruct.TIM_RepetitionCounter =0; //重复计数器的值,高级定时器才有,给0就行
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseInitStruct);
//TIM_TimeBaseInit设置自动更新会进一次中断,这边清除中断解决刚上电就会进一次中断的问题
TIM_ClearFlag(TIM4,TIM_FLAG_Update);
//4、配置中断输出控制
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);//更新中断到NVIC使能
//5、配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //选择优先级分组2
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStruct);
//6、配置运行控制
TIM_Cmd(TIM4, ENABLE); //启动定时器3
}最终效果图

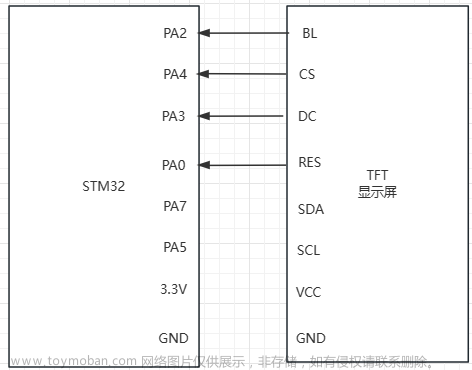
5. TFT显示屏驱动

5.1. 简介
该显示屏是一块以ST7735S驱动的1.8英寸采用SPI通信的TFT全彩屏,分辨率是128*128,这里采用RGB565 16bit的色块编译模式(RGB565即高五位为Red,第五位为Blue,中间六位为Green,共16位)。本文仅设计该屏幕的简单应用,不对底层原理进行深究。

| 引脚 |
Parameter |
| GND |
接地 |
| VCC |
3.3V-5V电源接入 |
| SCL |
SPI总线时钟信号 |
| SDA |
SPI总线写数据信号 |
| RES |
液晶屏复位信号,低电平复位 |
| DC |
液晶屏寄存器/数据选择信号,高电平:寄存器,低电平:数据 |
| CS |
液晶屏片选信号,低电平使能 |
| BL |
背光控制,高电平点亮,如无需控制则接3.3V常亮 |
5.2. 原理
屏幕的参数配置的大体流程如下:
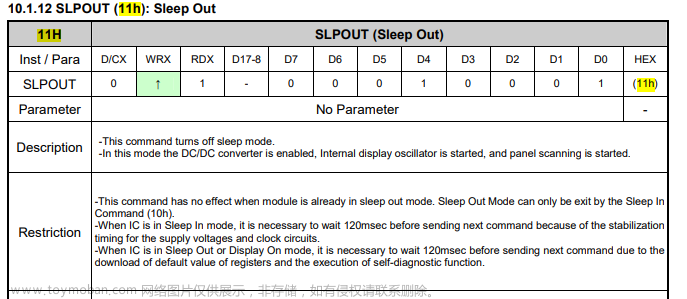
- 执行0X11命令,退出睡眠模式,执行命令后延时120ms
- 配置0XB1,0XB2,0XB3,0XB4寄存器,配置在不同颜色模式下屏幕的刷新率,0XB4寄存器配置屏幕是否反色

- 配置0XC0,0XC1,0XC2,0XC3,0XC4寄存器,配置显示屏在不同颜色不同模式下的电压
- 配置0X36寄存器,设置显存数据访问方式。如果颜色不正,注意查看颜色是顺序是的BGR的颜色顺序,有一位可以控制顺序的,36H的RGB位从1变到0颜色就正常了。

- 配置0XE0,0XE1寄存器,配置伽马极性
- 执行0X3A,设置像素格式

- 执行0X29命令,进行显示

5.3. 取模
显示屏的显示原理就是在屏幕上打点,显示中文,英文,图片本质都是在对应的位置,将这些点事先找出来就是取模;中文,英文,图片都要先取模才能显示。
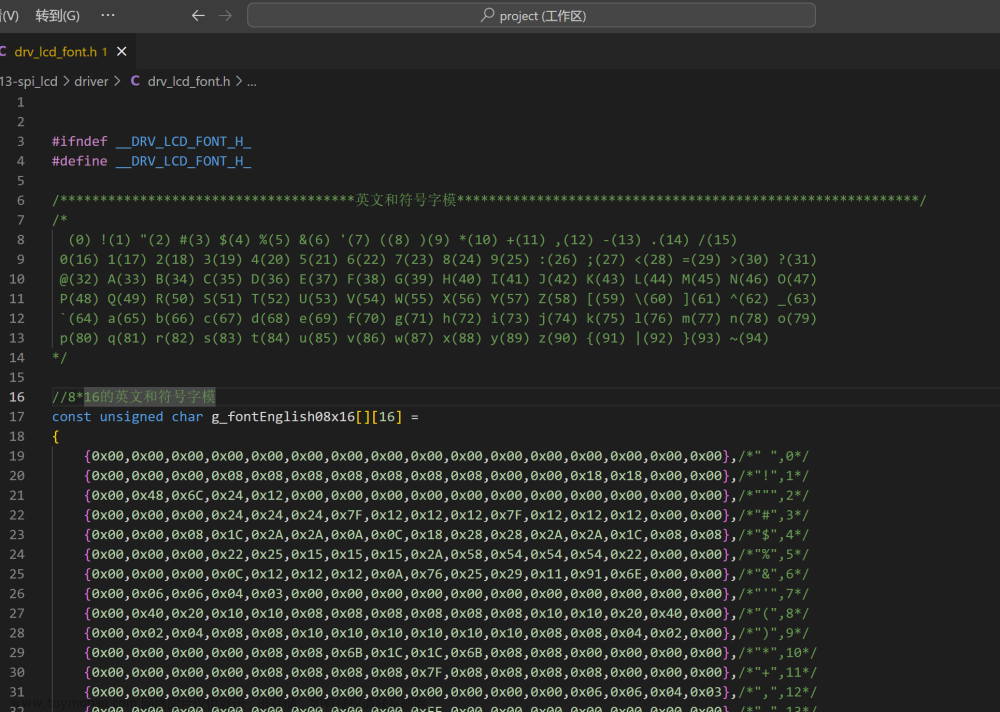
英文取模
附:ASCII码完整表:注第一个字符为空格,不要遗漏
!"#$%&'()*+,-./0123456789:;<=>?@ABCDEFGHIJKLMNOPQRSTUVWXYZ[\]^_`abcdefghijklmnopqrstuvwxyz{|}~
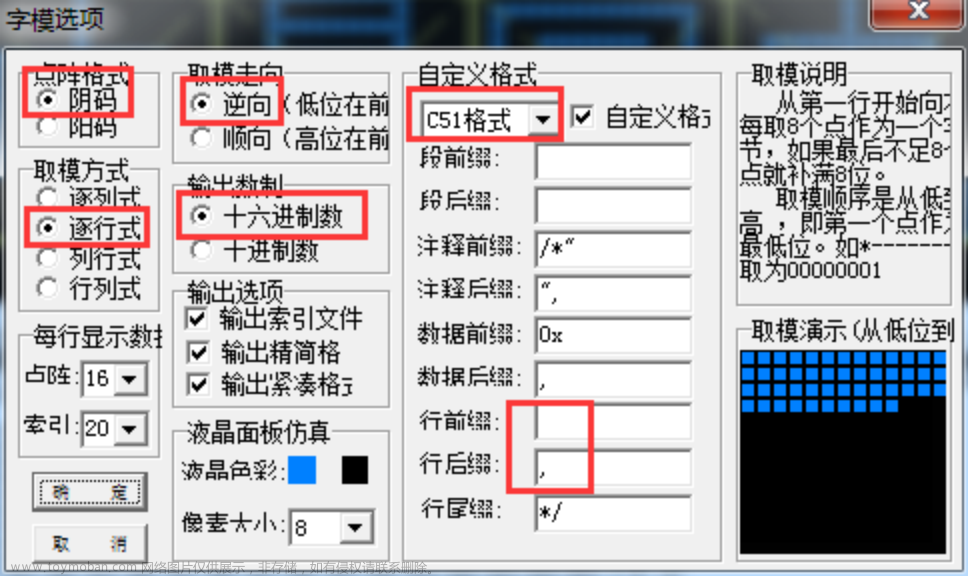
- 打开取模软件

- 左上角模式选择为字符模式

- 点击选项
4.设置如下,然后点击确定。
> 点阵要选择的数要大于字符所占字节数,例如8x16的字符所占字节为 8x16/2=16,所以这里点阵选大于16就行

- 以8x16ASCII取模为例:
字宽字高都改为16,那么对应的ASCII码为8x16,字宽会变为原来的一半
- 然后在输入栏输入ASCII码表

- 点击生成字模生成的字模

-
得到字模

8x16字模在例程font.h中已经取好 如下所示
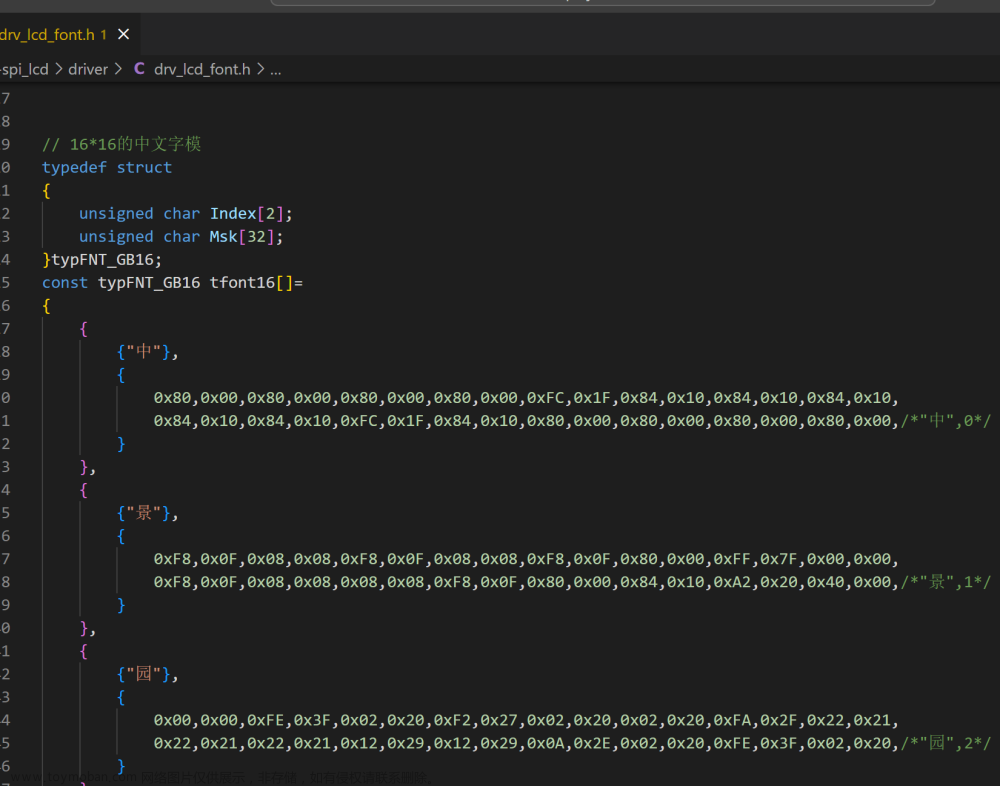
中文取模
- 开取模软件
- 左上角模式选择为字符模式
- 点击选项
- 设置如下,然后点击确定。
- 以16x16汉字取模为例:字宽字高都改为16

- 然后在输入栏输入汉字

- 点击生成字模

- 生成的字模如下

8x16字模在例程font.h中已经取好 如下所示
注:每个字的字模前需要添加这个汉字,并用双引号括起来然后加上逗号!
图片取模
- 打开下面文件夹的软件

- 打开要取模的图片:以例程的40x40企鹅图片为例


- 观察左下角的输入图像,如果显示如下这样,请看5

- 如果显示无效的输入图像,那么请使用电脑自带的画图软件将图片转化为16色位的bmp格式图片。

- 打开图片后设置如下

最大宽度和高度:设置好后点击右边三角形设置按钮(注意:此软件只能缩小图片不能放大图片!缩小是等比例缩小!) - 然后点击保存,输入文件名,得到数据数组

5.4. 代码
引脚连接关系
LCD初始化代码:全部代码见文件夹工程
// lcd1.8寸 128*160 初始化函数
void lcd_init(void)
{
lcd_gpio_init();
spi_init();
lcd_set_rest(); // lcd复位
lcd_wr_bl(1); // 打开背光
delay_ms(100);
//************* Start Initial Sequence **********//
lcd_wr_regist(0x11); //Sleep out
delay_ms(120); //Delay 120ms
//------------------------------------ST7735S Frame Rate-----------------------------------------//
lcd_wr_regist(0xB1);
lcd_wr_data(0x05); lcd_wr_data(0x3C); lcd_wr_data(0x3C);
lcd_wr_regist(0xB2);
lcd_wr_data(0x05); lcd_wr_data(0x3C); lcd_wr_data(0x3C);
lcd_wr_regist(0xB3);
lcd_wr_data(0x05); lcd_wr_data(0x3C); lcd_wr_data(0x3C);
lcd_wr_data(0x05); lcd_wr_data(0x3C); lcd_wr_data(0x3C);
//------------------------------------End ST7735S Frame Rate---------------------------------//
lcd_wr_regist(0xB4); //Dot inversion
lcd_wr_data(0x03);
//------------------------------------ST7735S Power Sequence---------------------------------//
lcd_wr_regist(0xC0);
lcd_wr_data(0x28); lcd_wr_data(0x08); lcd_wr_data(0x04);
lcd_wr_regist(0xC1);
lcd_wr_data(0XC0);
lcd_wr_regist(0xC2);
lcd_wr_data(0x0D); lcd_wr_data(0x00);
lcd_wr_regist(0xC3);
lcd_wr_data(0x8D); lcd_wr_data(0x2A);
lcd_wr_regist(0xC4);
lcd_wr_data(0x8D); lcd_wr_data(0xEE);
//---------------------------------End ST7735S Power Sequence-------------------------------------//
lcd_wr_regist(0xC5); //VCOM
lcd_wr_data(0x1A);
lcd_wr_regist(0x36); //MX, MY, RGB mode
if(USE_HORIZONTAL==0)lcd_wr_data(0x00);
else if(USE_HORIZONTAL==1)lcd_wr_data(0xC0);
else if(USE_HORIZONTAL==2)lcd_wr_data(0x70);
else lcd_wr_data(0xA0);
//------------------------------------ST7735S Gamma Sequence---------------------------------//
lcd_wr_regist(0xE0);
lcd_wr_data(0x04); lcd_wr_data(0x22); lcd_wr_data(0x07);
lcd_wr_data(0x0A); lcd_wr_data(0x2E); lcd_wr_data(0x30);
lcd_wr_data(0x25); lcd_wr_data(0x2A); lcd_wr_data(0x28);
lcd_wr_data(0x26); lcd_wr_data(0x2E); lcd_wr_data(0x3A);
lcd_wr_data(0x00); lcd_wr_data(0x01); lcd_wr_data(0x03);
lcd_wr_data(0x13);
lcd_wr_regist(0xE1);
lcd_wr_data(0x04); lcd_wr_data(0x16); lcd_wr_data(0x06);
lcd_wr_data(0x0D); lcd_wr_data(0x2D); lcd_wr_data(0x26);
lcd_wr_data(0x23); lcd_wr_data(0x27); lcd_wr_data(0x27);
lcd_wr_data(0x25); lcd_wr_data(0x2D); lcd_wr_data(0x3B);
lcd_wr_data(0x00); lcd_wr_data(0x01); lcd_wr_data(0x04);
lcd_wr_data(0x13);
//------------------------------------End ST7735S Gamma Sequence-----------------------------//
lcd_wr_regist(0x3A); //65k mode
lcd_wr_data(0x05);
lcd_wr_regist(0x29); //Display on
}测试代码效果

6. 雷达功能实现
6.1. 雷达GUI设计
使用TFT显示屏的驱动,在屏幕上画出雷达GUI图像
- 确定圆心(80,108),绘制多个圆
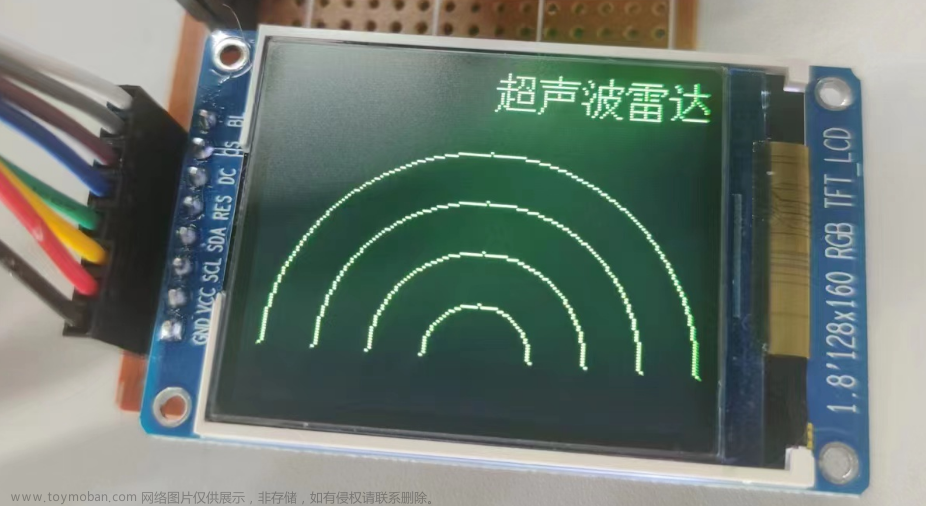
- 绘图填充图像,去掉圆的下半部分

- 绘制不同角度的斜线

- 绘制角度,距离等提示信息

绘制雷达图像代码
// 根据角度和长度,绘制从圆心开始的斜线
void radar_line(double k,int r)
{
int16_t x,y;
x=80+r*(double)cos(k/180*3.1415926);
y=108-r*(double)sin(k/180*3.1415926);
lcd_simple_line(80,108,x,y,GREEN);
}
//雷达图像
void radar_picture(void)
{
lcd_draw_chinese(80,0,GREEN,BLACK,16, 0,"超声波雷达");
//画圆:(圆心坐标,半径,颜色)
lcd_simple_circle(80,108,76,GREEN);
lcd_simple_circle(80,108,57,GREEN);
lcd_simple_circle(80,108,38,GREEN);
lcd_simple_circle(80,108,19,GREEN);
lcd_simple_fill(0, 108, 160, 20, BLACK); //去掉园的下半部分
//画斜线:(角度,长度)
radar_line(30,85);
radar_line(60,85);
radar_line(90,85);
radar_line(120,85);
radar_line(150,85);
lcd_simple_line(0,108,160,108,GREEN);
//数据信息
lcd_draw_integer(0, 46, GREEN, BLACK, 16, 0, 3, 150); // 150°数值
lcd_draw_integer(38, 22, GREEN, BLACK, 16, 0, 3, 120); // 120°数值
lcd_draw_integer(83, 20, GREEN, BLACK, 16, 0, 2, 90); // 90°数值
lcd_draw_integer(124, 32, GREEN, BLACK, 16, 0, 2, 60); // 60°数值
lcd_draw_integer(140, 49, GREEN, BLACK, 16, 0, 2, 30); // 30°数值
lcd_draw_chinese(21, 44, GREEN, BLACK, 16, 0, "°"); // 150°符号
lcd_draw_chinese(59, 19, GREEN, BLACK, 16, 0, "°"); // 120°符号
lcd_draw_chinese(97, 18, GREEN, BLACK, 16, 0, "°"); // 90°符号
lcd_draw_chinese(137, 30, GREEN, BLACK, 16, 0, "°"); // 60°符号
lcd_draw_chinese(152, 45, GREEN, BLACK, 16, 0, "°"); // 30°符号
lcd_simple_hz(0, 0, GREEN, "角度");
lcd_simple_char(4,0,GREEN, ':');
lcd_simple_hz(4,0,GREEN ,"°"); //显示°
lcd_simple_hz(0, 7, GREEN, "距离");
lcd_simple_char(4, 7, GREEN, ':');
lcd_simple_str(9,7,GREEN,"mm");
}6.2. 雷达功能实现
根据超声波传感器返回的距离值,根据屏幕尺寸等比例缩放,在屏幕上打印对应的点,下面是关键逻辑代码
while (1)
{
for (uint8_t i = 30; i <= 150; i++) // 舵机旋转
{
distMm = hcsr04_getValueMm(); // 获取超声波数据
uint16_t lcdMm = distMm/6; // 等比例缩小,便于显示在屏幕上
if(distMm <= 500)
{
lcd_simple_int(5,7, BLACK, 4, oldMn); // 覆盖上次距离信息
lcd_simple_int(5,7, GREEN, 4, distMm); // 显示新的距离信息
oldMn = distMm;
radar_redPoint(i, lcdMm); // 屏幕上打点
}
// lcd_draw_integer(3,114,3,GREEN,BLACK,16,0,distanceMm);
servo_setAngle(i);
lcd_simple_int(5,0, BLACK, 3, i-1); // 覆盖上次距离信息
lcd_simple_int(5,0, GREEN, 3, i); // 显示新的距离信息
delay_ms(20);
}
lcd_simple_int(5,0, BLACK, 3, 150); // 覆盖上次内容
for (uint8_t i = 30; i <= 150; i++) // 舵机往回旋转
{
distMm = hcsr04_getValueMm(); // 获取超声波数据
uint16_t lcdMm = distMm/6; // 等比例缩小,便于显示在屏幕上
if(distMm <= 500)
{
radar_redPoint(180-i, lcdMm);
lcd_simple_int(5,7, BLACK, 4, oldMn); // 覆盖上次内容
lcd_simple_int(5,7, GREEN, 4, distMm); // 显示新的内容
oldMn = distMm;
}
servo_setAngle(180 - i);
lcd_simple_int(5,0, BLACK, 3, 180-i+1); // 覆盖上次内容
lcd_simple_int(5,0, GREEN, 3, 180-i); // 显示新的内容
delay_ms(20);
}
lcd_simple_int(5,0, GREEN, 3, 30); // 显示新的内容
}文章来源:https://www.toymoban.com/news/detail-652691.html
7.资料下载地址
链接:https://pan.baidu.com/s/11KXIBepREsnWUQEn3BvVLg
提取码:8oai文章来源地址https://www.toymoban.com/news/detail-652691.html
到了这里,关于基于STM32的超声波雷达的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!