BSW架构和主要功能概要
->返回总目录<-文章来源:https://www.toymoban.com/news/detail-652881.html
一、什么叫BSW
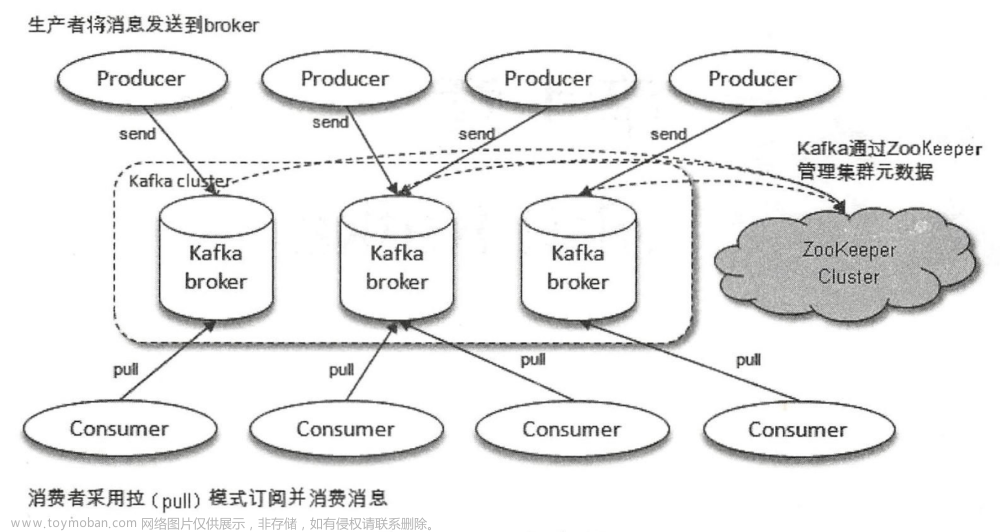
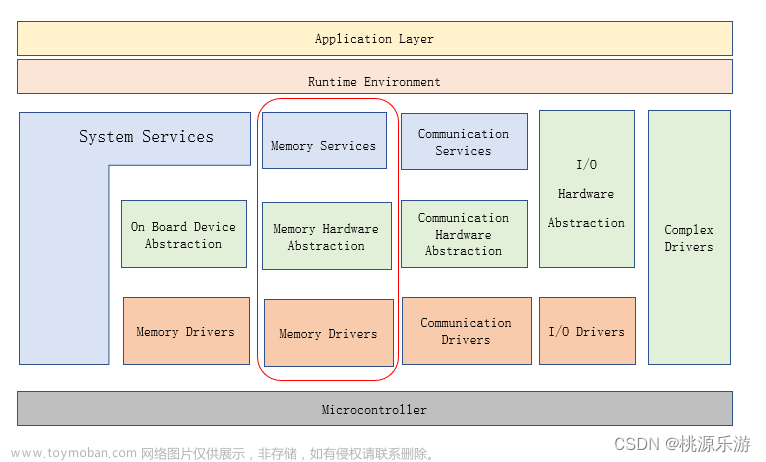
BSW是Basic Software的缩写,即基础软件层,为SWC提供基础软件服务, 包括标准化的系统功能以及功能接口。主要是通过分层,实现软件和硬件的隔离。从而使得整个软件的结构独立于硬件,针对不同的ECU硬件,可以通过配置的变更来满足OS和上层的需求。文章来源地址https://www.toymoban.com/news/detail-652881.html
<到了这里,关于AutoSAR配置与实践(基础篇)3.1 BSW架构和主要功能概要的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
![[AutoSar]BSW_OS 06 Autosar OS_Alarms](https://imgs.yssmx.com/Uploads/2024/01/818031-1.png)
![[AutoSar]BSW_OS 05 Autosar OS_schedule table](https://imgs.yssmx.com/Uploads/2024/01/807589-1.png)