目录
序:
1.为什么电机需要驱动电路?
2.驱动电路方案有哪些?(针对直流有刷电机的驱动电路)
3.电机的调速原理(PWM)
一、H桥
二、L298N驱动
1.L298N芯片
2.芯片封装图
3.芯片内部结构图
4.芯片引脚图(中、英文版)及引脚说明
5. 逻辑真值表
6.基于L298N的典型电机驱动电路
(一)带光耦隔离的驱动电路
(二)不带光耦隔离的驱动电路
(三)两种方案的分析
(四)平衡车选择的方案
三、TB6612FNG驱动
1.TB6612FNG芯片
2.芯片封装图
3.芯片内部结构图及引脚图
4.引脚说明
5.逻辑真值表
四、平衡车电机驱动最终方案
序:
1.为什么电机需要驱动电路?
①方便对电机的转速、方向进行控制
②满足电机的功率要求,控制端(如单片机)提供的电压、电流远低于电机正常工作的电压电流要求。
2.驱动电路方案有哪些?(针对直流有刷电机的驱动电路)
①采用集成芯片驱动电路。如下文的L298N、TB6612FNG典型的两款芯片。
②使用MOSFET和相关的栅极驱动芯片自己搭建驱动电路。一般在电机功率比较大,集成芯片无法驱动大功率电机时,采用自己搭建驱动电路的方法。
无论是采用芯片集成电路还是自制驱动电路,其基本原理都是H桥驱动原理,所以在介绍下面两款驱动芯片前,我们先简单了解一下H桥。
3.电机的调速原理(PWM)
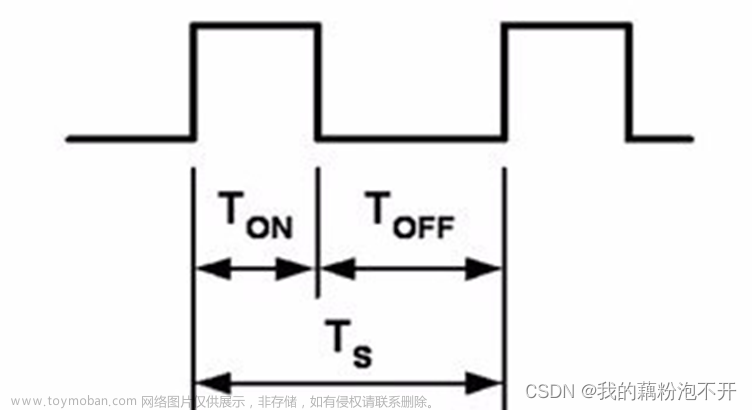
PWM:脉冲宽度调制,简单地说可以调整脉冲高电平和低电平的所占比例。
占空比:高电平占总周期的比例。
如图分别为10%、30%、50%占空比的方波:

占空比不同,即通电时间不同,导致平均电压、平均电流不同,电压电流直接决定了电机的转速,所以调节占空比就实现了调节电机转速。
一、H桥
首先,我们来了解一下电机只能单向旋转的驱动电路。

工作原理:单片机控制端输出高电平,MOSFET(理解成开关)导通,电路构成回路,电机按一个方向旋转;单片机控制端输出低电平,MOSFET断开,电机停止旋转。
初级H桥电路基本原理:

工作原理:当单片机控制端1和单片机控制端2输出高电平,单片机控制端3和单片机控制端4输出低电平,MOSFET1和MOSFET2导通,MOSFET3和MOSFET4断开,电流方向:MOSFET1->电机->MOSFET2,假定电机正转。当单片机控制端1和单片机控制端2输出低电平,单片机控制端3和单片机控制端4输出高电平,MOSFET1和MOSFET2断开,MOSFET3和MOSFET4导通,电流方向:MOSFET3->电机->MOSFET4,则电机反转。
二、L298N驱动
1.L298N芯片
L298N是一款高电压、大电流双全桥驱动芯片,可同时驱动两个电机。它接受标准的TTL电平控制。
2.芯片封装图

3.芯片内部结构图

显然,芯片内部集成了两个独立的H桥电路,所以这款芯片可以同时驱动两个电机动作。
4.芯片引脚图(中、英文版)及引脚说明


| 引脚号 | 名称 | 功能 |
|---|---|---|
| 1 | 电流传感器A | 在该引脚和地之间接小阻值电阻可用来检测电流 |
| 2 | 输出引脚1 | 内置驱动器A输出端1,连接电机A一端 |
| 3 | 输出引脚2 | 内置驱动器A输出端2,连接电机A另一端 |
| 4 | 电机电源端 | 电机供电输入端,接入电压由电机额定电压决定(2.5V~46V) |
| 5 | 输入引脚1 | 内置驱动器A的逻辑控制输入端1 |
| 6 | 使能端A | 内置驱动器A的使能端 |
| 7 | 输入引脚2 | 内置驱动器A的逻辑控制输入端2 |
| 8 | 逻辑地 | 逻辑地 |
| 9 | 逻辑电源端 | 逻辑控制电路的电源输入端,接+5V(4.5V~7V) |
| 10 | 输入引脚3 | 内置驱动器B的逻辑控制输入端3 |
| 11 | 使能端B | 内置驱动器B的使能端 |
| 12 | 输入引脚4 | 内置驱动器B的逻辑控制输入端4 |
| 13 | 输出引脚3 | 内置驱动器B输出端3,连接电机B一端 |
| 14 | 输出引脚4 | 内置驱动器B输出端4,连接电机B另一端 |
| 15 | 电流传感器B | 在该引脚和地之间接小阻值电阻可用来检测电流 |
5. 逻辑真值表
| IN1 | IN2 | ENA | 电机 |
| X | X | 0 | 自由转动 |
| 1 | 0 | 1 | 顺时针 |
| 0 | 1 | 1 | 逆时针 |
| 0 | 0 | 1 | 刹停 |
| 1 | 1 | 1 | 刹停 |
特别注意:
★IN3、IN4、ENB的逻辑与上表完全一样。
★这里的顺时针和逆时针都是假定的,在实际实验时,如果电机转动方向与控制方向不一致,一般直接交换芯片输出端与电机的连接
★当需要进行电机调速时,PWM脉冲由使能端ENA输入,由输入端IN1、IN2控制方向或PWM脉冲由使能端ENB输入,由输入端IN3、IN4控制方向。
6.基于L298N的典型电机驱动电路
(一)带光耦隔离的驱动电路
原理图:

(二)不带光耦隔离的驱动电路
原理图:

(三)两种方案的分析
①100uF电容:滤波电容,滤除电源的低频纹波。
②0.1uF电容:滤波电容,滤除电源的高频纹波。
③8个1N4007二极管:由于电机是电感性元件,电机线圈在运转过程中两边会产生反电势,对L298形成冲击,易造成损坏,特别是对于大于电源电压和负电压更容易损坏L298,所以在每根线上都加上2个二极管(一般采用1N4007)进行保护。工作过程是:假如电机电源电压为+12V,当反电势为正,超过电源+0.7V时(即>12.7V),上端二极管导通,这样输出线电压就被限位在12.7V上,不会超过这个数值。当反电势为负,低于-0.7V时,下端二极管导通,这样输出线电压就被限位在-0.7V上,不会低于-0.7V了。这两个二极管是作为钳位使用,使得输出线上电压钳位在-0.7V~12.7V之间了。
细看两张电路图,可以发现二者的区别:带光耦隔离驱动电路L298N的IN1、IN2、IN3、IN4、ENA、ENB与单片机通过一块TLP521芯片(可控制的光耦合器件)相连,不带光耦隔离驱动电路的IN1、IN2、IN3、IN4、ENA、ENB直接与单片机相连。
④光耦隔离的优点:起到信号的隔离作用。由于光耦是单向传输的,所以可以实现信号的单向传输,使输入端与输出端完全实现了电气隔离,输出信号对输入端无影响,抗干扰能力强,工作稳定。
⑤光耦隔离的缺点:输入通路与输出通路需要独立的电源,采用共阳极光耦连接时单片机的地和驱动L298N的地不能相连,否则不起隔离作用。
(四)平衡车选择的方案
①我们的平衡车只由一块锂电池供电(单电源供电)
②实际上没有光耦隔离也不至于烧毁控制器的IO口,市场上的大部分L298N驱动电路都是不带有光耦隔离电路。
综上若我们的平衡车使用L298N驱动电路应该选择没有隔离模块的L298N驱动电路。
三、TB6612FNG驱动
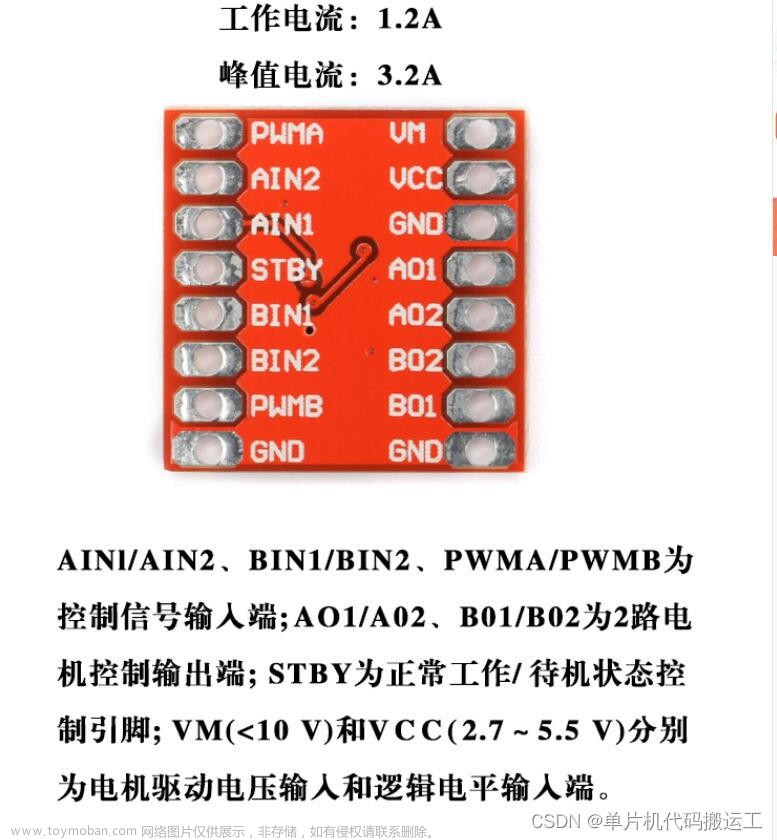
1.TB6612FNG芯片
它具有大电流MOSFET-H桥结构,双通道电路输出,可同时驱动2个电机。相比L298N的热耗性和外围二极管续流电路,它无需外加散热片,外围电路简单,只需外接电源滤波电容就可以直接驱动电机,利于减小系统尺寸。对于PWM信号,它支持高达100 kHz的频率,相对L298N的40 kHz也具有较大优势。
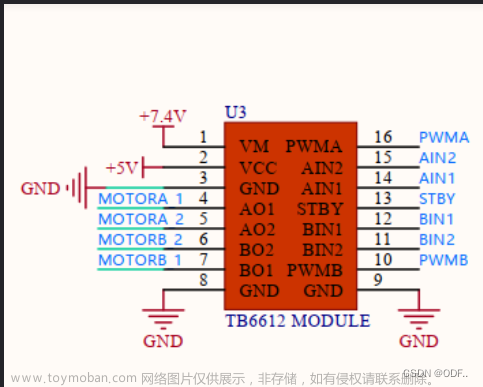
2.芯片封装图

3.芯片内部结构图及引脚图

4.引脚说明
| 引脚 | 名称 | 功能 |
|---|---|---|
| 1 | AO1 | 内置驱动器A输出端1,连接电机A一端 |
| 2 | AO1 | 内置驱动器A输出端1,连接电机A一端 |
| 3 | PGND1 | 电源地1 |
| 4 | PGND1 | 电源地1 |
| 5 | AO2 | 内置驱动器A输出端2,连接电机A另一端 |
| 6 | AO2 | 内置驱动器A输出端2,连接电机A另一端 |
| 7 | BO2 | 内置驱动器B输出端2,连接电机B另一端 |
| 8 | BO2 | 内置驱动器B输出端2,连接电机B另一端 |
| 9 | PGND2 | 电源地2 |
| 10 | PGND2 | 电源地2 |
| 11 | BO1 | 内置驱动器B输出端1,连接电机B一端 |
| 12 | BO1 | 内置驱动器B输出端1,连接电机B一端 |
| 13 | VM2 | 电机供电输入端,接入电压由电机额定电压决定(2.5V~13.5V) |
| 14 | VM3 | 电机供电输入端,接入电压由电机额定电压决定(2.5V~13.5V) |
| 15 | PWMB | PWMB信号输入端 |
| 16 | BIN2 | 内置驱动器B的逻辑控制输入端2 |
| 17 | BIN1 | 内置驱动器B的逻辑控制输入端1 |
| 18 | GND | 逻辑地 |
| 19 | STBY | |
| 20 | VCC | 逻辑控制电路的电源输入端,接+5V(2.7V~5.5V) |
| 21 | AIN1 | 内置驱动器A的逻辑控制输入端1 |
| 22 | AIN2 | 内置驱动器A的逻辑控制输入端2 |
| 23 | PWMA | PWMA信号输入端 |
| 24 | VM1 | 电机供电输入端,接入电压由电机额定电压决定(2.5V~13.5V) |
5.逻辑真值表
| AIN1 | AIN2 | PWM | 电机 |
| X | X | 0 | 刹停 |
| 1 | 0 | PWM | 顺时针 |
| 0 | 1 | PWM | 逆时针 |
| 0 | 0 | PWM | 自由停车 |
| 1 | 1 | PWM | 刹停 |
特别注意:
★BIN1、BIN2、PWMB的逻辑与上表完全一样。
★这里的顺时针和逆时针都是假定的,在实际实验时,如果电机转动方向与控制方向不一致,一般直接交换芯片输出端与电机的连接
6.基于TB6612FNG的典型电机驱动电路

四、平衡车电机驱动最终方案
电机额定功率大——L298N(单电源选择不带光耦隔离电路)
电机额定功率小——TB6612FNG
熊同学购买的电机额定电压是6V,要求外围电路简单,所以我选择TB6612FNG为驱动芯片。
以上就是电机驱动所有知识,接下来我们会学习MPU6050硬件电路和STM32最小系统电路,有时间的话可以设计一下MSP432E401的最小系统电路,设计完成之后我们将把电源模块电路、驱动模块电路、MPU6050模块电路、STM32最小系统电路等使用Altium Designer软件集成到一块PCB板上。
文章若有不正确的地方希望各位大佬指出,遇到不理解的地方欢迎询问,谢谢大家!!文章来源:https://www.toymoban.com/news/detail-657151.html
我是熊同学,我们下一期见。文章来源地址https://www.toymoban.com/news/detail-657151.html
到了这里,关于平衡车Car_Balance(二)——电机驱动的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!