目录
代码:
注释写的较少,但本文出现的代码都有注释,所以请直接在本文里看注释
项目概述:
一 准备阶段(都是些废话)
二 裸机测试功能
1.摇杆控制
接线:
CubeMX配置:
代码
2.蓝牙控制
接线:
CubeMX配置
代码:
3.示教器控制
4.记录动作信息
5.执行记录的动作
注:
三 FreeRTOS上完成项目
1.加入IIC的OLED屏显 和 动作执行(数组版)
CubeMX配置:
代码:
2.链表的增删遍历实现动作记忆和执行
3.SPI扩容
功能测试
w25q128芯片分析与功能实现
代码:
注释写的较少,但本文出现的代码都有注释,所以请直接在本文里看注释
链接:https://pan.baidu.com/s/14GJF8ZCnkNkKkz5R0uJwOA?pwd=1111
提取码:1111
--来自百度网盘超级会员V4的分享
项目概述:
基于STM32的FreeRTOS四轴机械臂
基于FreeRTOS实时操作系统,主控为 STM32F103C8T6 ,机械臂为四轴分别被四个Mg90s舵机控制。本项目实现了 3 种控制方法,分别为 摇杆控制 、 串口蓝牙控制 和 示教器控制。可以进行动作录制和执行。
采用8路ADC采集摇杆和示教器的模拟量并由DMA搬运数据,USART串口实时收发信息,IIC驱动OLED屏幕实时显示信息。并且实现了动作录制和执行功能,动作记忆可以由二维数组或者链表实现存储。通过SPI驱动W25Q128模块进行动作记忆扩容,即可以录制上百组动作。
一 准备阶段(都是些废话)
首先你需要一台四轴机械臂,才能开始这个项目。可以自己建模3D打印,也可以直接某宝购买了一套成品套件,来做功能实现。而你的机械臂会配备四个电机,本文采用的是舵机,型号无所谓,控制起来是一样的,注意需要是180度的角度型舵机,而不是360度的速度型舵机。
然后是单片机及开发环境,使用STM32F103C8T6。开发环境为STM32cubeM和Keil5。
(如果你没有STM32开发经验:首先你至少要有一点C语言基础,最基本的代码要能读懂什么意思;然后最好有过其它单片机开发经验,比如C51、ESP8266等等,或者直接学习一下STM32开发。板子随便买一个此型号的开发板就行,买最小系统板+面包板也可以。STM32cubeMX+Keil5,可以自行百度搜索并下载安装,我建议在B站找一个STM32HAL库的教程,跟着安装,且最好教程芯片型号与你使用的要一致。按照教程走一遍。确认开发板和开发环境可用之后,简单学习一下HAL库开发。然后可以继续下面的步骤。)
STM32cubeM和Keil5的教程推荐:
【中科大RM电控合集】手把手Keil+STM32CubeMX+VsCode环境配置_哔哩哔哩_bilibili
其它硬件准备:
| HC系列蓝牙串口模块,实测HC-05和HC-08都可以 |
| 摇杆模块,买两个即可。 |
| 四个旋钮电位器,质量别太差。 |
| IIC协议OLED屏幕 |
| SPI协议W25Q128模块 |
| 按钮模块若干,我用了四个,有板载的按钮也可以,尽量买带电容的防抖按钮 |
| 舵机拓展板,可有可无,面包板也能用。 |
| 各式杜邦线若干。 |
二 裸机测试功能
1.摇杆控制
首先是摇杆控制STM32,需要4路1ADC+DMA采集摇杆输出的模拟量。根据这个数据来控制舵机角度。蓝牙串口把ADC信息和舵机角度打印出来。蓝牙直接用HC官方的HC蓝牙串口助手就行。
接线:
摇杆4个输出模拟量的引脚连接stm32的A0,A1,A2,A3,VCC这里接5V。
舵机A,夹爪 CH4_B11;adc4_A3
舵机B,上下 CH3_B10;adc3_A2
舵机C,前后 CH2_B3;adc2_A1
舵机D,底座 CH1_A15;adc1_A0
蓝牙TX对板子RX A10,
蓝牙RX对板子TX A9。
CubeMX配置:
基本配置(后面每个工程都是这一套)





ADC1:4路


DMA:搬运ADC数据的

PWM输出:选用799*1799,这样可以把舵机有效的 0.5~2.5ms / 20ms 这个区间分成180段,对应0~180度。

usart,9600波特率给蓝牙模块用。

然后 generate code 即可
代码:
注:只有这种注释之间是用户自己写业务代码的地方,写其它地方再重生成功能会被清除。
/* USER CODE BEGIN */
。。。。 。。。。
/* USER CODE END */main.c
关键控制代码在于check的四个函数,首先限制舵机的角度范围避免损坏,再根据采集的摇杆信息值判断每个舵机的角度是增加还是减小。
注释比较清楚,直接看代码就行。
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
uint16_t adc_dma[4];//DMA搬运的ADC采集值
uint8_t angle[4] = {90,90,90,90};//舵机角度
uint8_t cnt = 0;//计数用,定时串口打印信息
/* USER CODE END PV */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//覆写printf,用于串口打印数据
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
//根据输入的0~180角度获取对应pwm占空比参数
uint8_t Angle(uint8_t pwm_pulse)
{
return pwm_pulse + 44;
}
//舵机A,夹爪 CH4_B11
void cheack_A()
{
if(adc_dma[3] > 4000 && angle[3] < 90)
{
angle[3]++;
}
else if(adc_dma[3] <1000 && angle[3] > 0)
{
angle[3]--;
}
}
//舵机B,上下 CH3_B10
void cheack_B()
{
if(adc_dma[2] <1000 && angle[2] < 135)
{
angle[2]++;
}
else if(adc_dma[2] > 4000 && angle[2] > 45)
{
angle[2]--;
}
}
//舵机C,前后 CH2_B3
void cheack_C()
{
if(adc_dma[1] <1000 && angle[1] < 135)
{
angle[1]++;
}
else if(adc_dma[1] > 4000 && angle[1] > 45)
{
angle[1]--;
}
}
//舵机D,底座 CH1_A15
void cheack_D()
{
if(adc_dma[0] <1000 && angle[0] < 180)
{
angle[0]++;
}
else if(adc_dma[0] > 4000 && angle[0] > 0)
{
angle[0]--;
}
}
/* USER CODE END 0 */
/* USER CODE BEGIN 2 */
HAL_ADC_Start_DMA(&hadc1,(uint32_t *)adc_dma,4); //开始ADC和DMA采集
//开启4路PWM
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_4);
//延时半秒,系统稳定一下
HAL_Delay(500);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//根据摇杆DMA判断舵机该如何运动
cheack_A();
cheack_B();
cheack_C();
cheack_D();
//输出PWM波使舵机运动
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, Angle(angle[0]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, Angle(angle[1]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_3, Angle(angle[2]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_4, Angle(angle[3]));
cnt++;//计数,每循环一次+1
if(cnt>= 50)//循环50次,每次20ms,即一共1s。每一秒发送一次数据
{
printf("Angle = {%d, %d, %d, %d}\r\n",angle[0],angle[1],angle[2],angle[3]);
cnt = 0;
}
HAL_Delay(20);//每20ms循环一次(改成15更流畅)
}
/* USER CODE END 3 */这里要勾选才能使用printf串口打印信息

2.蓝牙控制
这里提前写了一点示教器的业务代码,执行切换模式操作会切换获取摇杆模拟值还是电位器模拟值。
注意:我这里整活儿搞了个ADC通道切换,但实测还是存在一点问题,你们直接使用8通道一起就好。
接线:
先不使用示教器,但是可以先测试一下功能,切换模式和采集一下数据。
把四个旋钮电位器接好,四根线接到ADC 5 6 7 8
CubeMX配置
打开串口中断,中断接收数据。

我这里是ADC再开四个,其它不配置。
你们开启共8个之后把下面个数也4改成8,新的组别5678也改成IN4 5 6 7 四个通道

代码:
都写在main.c里面会太冗长,我这里分文件编程了,不懂可以百度keil怎么添加.c .h文件,实在不行就都放在main.c里吧。。。
adc.c
纯粹整活儿,自定义了一个ADC初始化,把采集1234换成5678来采集电位器信号。直接用八个通道一起采集就行,然后把原来放采集数据的那个数组adc_dma长度也改成8。
/* USER CODE BEGIN 1 */
//写一个切换通道的函数
/* ADC1_Mode2 init function */
void MX_ADC1_Mode2_Init(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
/** Common config
*/
hadc1.Instance = ADC1;
hadc1.Init.ScanConvMode = ADC_SCAN_ENABLE;
hadc1.Init.ContinuousConvMode = ENABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 4;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_4;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_5;
sConfig.Rank = ADC_REGULAR_RANK_2;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_6;
sConfig.Rank = ADC_REGULAR_RANK_3;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_7;
sConfig.Rank = ADC_REGULAR_RANK_4;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE END 1 */adc.h
/* USER CODE BEGIN Prototypes */
void MX_ADC1_Mode2_Init(void);
/* USER CODE END Prototypes */usart.c
注:STM32串口接收到的信息都在这里进行处理,千万别忘了最下面一行代码,开启中断。
//=======中断信息处理=======
。。。。。。。。
//==========================/* USER CODE BEGIN 0 */
#include "stdio.h"
#include "string.h"
#include "PWM.h"
#include "adc.h"
#include "dma.h"
/*机械臂控制模式,默认为1
1:摇杆控制
2:示教器控制 */
uint8_t Mode = 1;
/*蓝牙控制机械臂指令:
s 停
l/r 左右
u/d 上下
f/b 前后
o/c 开合*/
uint8_t cmd_BLE = 's';
extern uint16_t adc_dma[4];//DMA搬运的ADC采集值
//覆写printf
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
//=====串口(中断)=======
//串口接收缓存(1字节)
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;
// 串口中断:接收完成回调函数,收到一个数据后,在这里处理
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 判断中断是由哪个串口触发的
if(huart->Instance == USART1)
{
// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)
if((UART1_RX_STA & 0x8000) == 0)
{
// 如果已经收到了 0x0d (回车),
if(UART1_RX_STA & 0x4000)
{
// 则接着判断是否收到 0x0a (换行)
if(buf == 0x0a)
{
// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1
UART1_RX_STA |= 0x8000;
//=======中断信息处理=======
//模式切换
if (!strcmp((const char *)UART1_RX_Buffer, "M1"))
{
Mode = 1;
HAL_ADC_Stop_DMA(&hadc1);//停止ADC DMA
MX_ADC1_Init();//初始化ADC1
HAL_ADC_Start_DMA(&hadc1,(uint32_t *)adc_dma,4); //开启ADC DMA
printf("摇杆模式\r\n");
}
else if(!strcmp((const char *)UART1_RX_Buffer, "M2"))
{
Mode = 2;
HAL_ADC_Stop_DMA(&hadc1);//停止ADC DMA
MX_ADC1_Mode2_Init();//自定义初始化ADC1,把1234换成5678采集电位器
HAL_ADC_Start_DMA(&hadc1,(uint32_t *)adc_dma,4); //开启ADC DMA
printf("示教器模式\r\n");
}
//获取蓝牙控制指令,A打头,后面一个字母就是指令内容
else if(Mode == 1 && UART1_RX_Buffer[0] == 'A')
{
cmd_BLE = UART1_RX_Buffer[1];
}
else {
if(UART1_RX_Buffer[0] != '\0')
printf("指令发送错误:%s\r\n", UART1_RX_Buffer);
}
//==========================
memset(UART1_RX_Buffer, 0, strlen((const char *)UART1_RX_Buffer));
// 重新开始下一次接收
UART1_RX_STA = 0;
//==========================
}
else
// 否则认为接收错误,重新开始
UART1_RX_STA = 0;
}
else // 如果没有收到了 0x0d (回车)
{
//则先判断收到的这个字符是否是 0x0d (回车)
if(buf == 0x0d)
{
// 是的话则将 bit14 位置为1
UART1_RX_STA |= 0x4000;
}
else
{
// 否则将接收到的数据保存在缓存数组里
UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;
UART1_RX_STA++;
// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > UART1_REC_LEN - 1)
UART1_RX_STA = 0;
}
}
}
// 重新开启中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
}
/* USER CODE END 0 */
/* USER CODE BEGIN USART1_Init 2 */
// 开启接收中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
/* USER CODE END USART1_Init 2 */我这里新建了两个PWM.c和.h文件。
把蓝牙指令控制和摇杆控制放在一起判断了。
#include "PWM.h"
#include "main.h"
extern uint16_t adc_dma[4];//DMA搬运的ADC采集值
extern uint8_t angle[4];//舵机角度
extern uint8_t Mode;
extern uint8_t cmd_BLE;
//根据输入的角度获取对应pwm占空比参数
uint8_t Angle(uint8_t pwm_pulse)
{
return pwm_pulse + 44;
}
//舵机A,夹爪 CH4_B11
void check_A()
{
if(Mode == 1)
{
if((cmd_BLE == 'c' || adc_dma[3] > 4000) && angle[3] < 90)//合
{
angle[3]++;
}
else if((cmd_BLE == 'o' || adc_dma[3] <1000) && angle[3] > 0)//开
{
angle[3]--;
}
}
}
//舵机B,上下 CH3_B10
void check_B()
{
if(Mode == 1)
{
if((cmd_BLE == 'u' || adc_dma[2] <1000) && angle[2] < 135)//上
{
angle[2]++;
}
else if((cmd_BLE == 'd' || adc_dma[2] > 4000) && angle[2] > 45)//下
{
angle[2]--;
}
}
}
//舵机C,前后 CH2_B3
void check_C()
{
if(Mode == 1)
{
if((cmd_BLE == 'f' || adc_dma[1] <1000) && angle[1] < 135)//前
{
angle[1]++;
}
else if((cmd_BLE == 'b' || adc_dma[1] > 4000) && angle[1] > 45)//后
{
angle[1]--;
}
}
}
//舵机D,底座 CH1_A15
void check_D()
{
if(Mode == 1)
{
if((cmd_BLE == 'l' || adc_dma[0] <1000) && angle[0] < 180)//左
{
angle[0]++;
}
else if((cmd_BLE == 'r' || adc_dma[0] > 4000) && angle[0] > 0)//右
{
angle[0]--;
}
}
}
#ifndef __PWM_H__
#define __PWM_H__
//根据输入的角度获取对应pwm占空比参数
unsigned char Angle(unsigned char pwm_pulse);
//舵机A,夹爪 CH4_B11
void check_A(void);
//舵机B,上下 CH3_B10
void check_B(void);
//舵机C,前后 CH2_B3
void check_C(void);
//舵机D,底座 CH1_A15
void check_D(void);
#endif
main.c
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "PWM.h"
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
uint16_t adc_dma[4];//DMA搬运的ADC采集值
uint8_t angle[4] = {90,90,90,90};//舵机角度
uint8_t cnt = 0;//计数用
/* USER CODE END PV */
/* USER CODE BEGIN 2 */
printf("Start\r\n");
HAL_ADC_Start_DMA(&hadc1,(uint32_t *)adc_dma,4);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_4);
HAL_Delay(500);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//根据摇杆DMA判断舵机该如何运动
check_A();
check_B();
check_C();
check_D();
//输出PWM波使舵机运动
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, Angle(angle[0]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, Angle(angle[1]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_3, Angle(angle[2]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_4, Angle(angle[3]));
cnt++;
if(cnt>= 50)
{
printf("Angle = {%d, %d, %d, %d}\r\n",angle[0],angle[1],angle[2],angle[3]);
cnt = 0;
}
HAL_Delay(20);
}
/* USER CODE END 3 */3.示教器控制
把示教器控制的业务代码也写出来,和蓝牙/摇杆控制封装在一个函数里,main里直接调用这个函数就行。
主要是PWM.c添加了一些代码,直接修改上面代码即可。
extern uint16_t adc_dma[4];//DMA搬运的ADC采集值,直接用8通道就改长度8
extern uint8_t angle[4];//舵机角度
extern uint8_t Mode;
extern uint8_t cmd_BLE;
//根据输入的角度获取对应pwm占空比参数
uint8_t Angle(uint8_t pwm_pulse)
{
return pwm_pulse + 44;
}
//舵机角度如何变化和模式判断的函数
void sg()
{
if(Mode == 1)//蓝牙/摇杆模式
{
check_A();
check_B();
check_C();
check_D();
}
else if(Mode == 2)//示教器模式
{
translate();
}
//输出PWM波使舵机运动
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, Angle(angle[0]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, Angle(angle[1]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_3, Angle(angle[2]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_4, Angle(angle[3]));
HAL_Delay(20);
}
void translate()//把采集的模拟值转变为角度。即0~4095变为0~180,除以22.75即可。
{
angle[3] = (uint8_t)((double)adc_dma[0] / 22.75)/2;
angle[2] = (uint8_t)((double)adc_dma[1] / 22.75);
angle[1] = (uint8_t)((double)adc_dma[2] / 22.75) - 10;
angle[0] = 180 - (uint8_t)((double)adc_dma[3] / 22.75);//电位器装反,改为 180 - 即可
//直接用8通道就是adc_dma[4~7]
}PWM.h
#ifndef __PWM_H__
#define __PWM_H__
//根据输入的角度获取对应pwm占空比参数
unsigned char Angle(unsigned char pwm_pulse);
//舵机A,夹爪 CH4_B11
void check_A(void);
//舵机B,上下 CH3_B10
void check_B(void);
//舵机C,前后 CH2_B3
void check_C(void);
//舵机D,底座 CH1_A15
void check_D(void);
void sg(void);
void translate(void);
#endifmain.c
/* USER CODE BEGIN 2 */
printf("Start\r\n");
HAL_ADC_Start_DMA(&hadc1,(uint32_t *)adc_dma,4);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_4);
HAL_Delay(500);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
sg();//判断舵机该如何运动
cnt++;
if(cnt>= 25)
{
printf("Angle = {%d, %d, %d, %d}\r\n",angle[0],angle[1],angle[2],angle[3]);
//printf("adc_dma = {%d, %d, %d, %d}\r\n",adc_dma[0],adc_dma[1],adc_dma[2],adc_dma[3]);
cnt = 0;
}
}
/* USER CODE END 3 */至此,基本的控制功能代码已经完成了。小白的话完成到这里已经很不错了。
4.记录动作信息
本质上就是保存当前的舵机的四个角度值。
这里暂时先用二维数组来做。
被添加的代码:
蓝牙指令A后的 m g D ,对应我们这里 记录当前角度、获取所有记录的角度、删除所有记录。
#include "stdio.h"
#include "string.h"
uint8_t memory[10][4];//记录用的数组
uint8_t i,j = 0;
void sg()
{
if(Mode == 1)
{
check_A();
check_B();
check_C();
check_D();
}
else if(Mode == 2)
{
translate();
if(cmd_BLE == 'm' && i<9)
{
for(j=0;j<4;j++)
{
memory[i][j] = angle[j];
}
printf("储存动作\r\n");
cmd_BLE = 's';
i++;
}
else if(cmd_BLE == 'm' && i>=9)
printf("动作已满\r\n");
cmd_BLE = 's';
}
if(cmd_BLE == 'g')
{
for(i=0;i<10;i++)
{
for(j=0;j<4;j++)
{
printf("%d ",memory[i][j] + 0x30);
}
printf("\r\n");
if(memory[i][j] == '\0') break;
}
cmd_BLE = 's';
}
else if(cmd_BLE == 'D')
{
for(i=0;i<10;i++)
{
memset(memory[i],'\0',4);
}
i = 0;
printf("已清除动作");
cmd_BLE = 's';
}
//输出PWM波使舵机运动
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, Angle(angle[0]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, Angle(angle[1]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_3, Angle(angle[2]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_4, Angle(angle[3]));
HAL_Delay(20);
}5.执行记录的动作
这里开始已经转到FreeRTOS上了,没继续在裸机上做。所以没写对应源码,不过可以拿后面FreeRTOS上实现的代码放在这里。没区别一样可以用。需要你们自己来实现和调试。
PWM.c
主要就是下面这两个函数:
location_cnt是数组长度,宏定义出来就行,自己调整长度
uint8_t memory[location_cnt][4];
uint8_t i,j = 0;
uint8_t angle_target[4] = {90,90,90,90};
uint8_t angle_target_flag = 0;
void get_target()//从数组获得位置信息并转换位角度目标值
{
angle_target_flag = 0;
for(j=0;j<4;j++)
{
if(angle[j] == angle_target[j]) angle_target_flag++;
}
if(angle_target_flag == 4) i++;
for(j=0;j<4;j++)
{
if(memory[i][j] == '\0')
{
i = 0;
}
angle_target[j] = memory[i][j];
}
}
void reach_target()//角度值像角度目标值靠近,用于简单防抖和执行记忆动作
{
for(j = 0;j <4;j++)
{
if(angle[j] > angle_target[j])
{
angle[j]--;
}
else if(angle[j] < angle_target[j])
{
angle[j]++;
}
}
}
void translate()//根据实际情况做了一点角度矫正和限位
{
angle_target[3] = (uint8_t)((double)adc_dma[4] / 22.75)/2;
angle_target[2] = (uint8_t)((double)adc_dma[5] / 22.75);
angle_target[1] = (uint8_t)((double)adc_dma[6] / 22.75) - 10;
angle_target[0] = 180 - (uint8_t)((double)adc_dma[7] / 22.75);
if(angle_target[1]<45) angle_target[1]=45;
else if(angle_target[1]>135) angle_target[1]=135;
if(angle_target[2]<45) angle_target[1]=45;
else if(angle_target[2]>135) angle_target[1]=135;
}
//是否记录当前位置信息
void if_BLE_cmd()
{
switch(cmd_BLE)
{
case 'm':
if(i < location_cnt)
{
for(j=0;j<4;j++)
{
memory[i][j] = angle[j];
}
printf("储存动作\r\n");
cmd_BLE = 's';
i++;
}
else
{
printf("动作已满\r\n");
cmd_BLE = 's';
}
break;
case 'g':
for(i=0;i < location_cnt;i++)
{
for(j=0;j<4;j++)
{
printf("%d ",memory[i][j]);
}
printf("\r\n");
if(memory[i][j] == '\0') break;
}
cmd_BLE = 's';
break;
case 'D':
for(i=0; i < location_cnt ;i++)
{
memset(memory[i],'\0',4);
}
i = 0;
printf("已清除动作");
cmd_BLE = 's';
break;
}
}
void check_sg_cmd()//蓝牙和摇杆控制
{
check_A();
check_B();
check_C();
check_D();
}usart.c
/*机械臂控制模式,默认为1
1:摇杆控制
2:示教器控制
3:执行记忆动作
*/
uint8_t Mode = 1;
//=======中断信息处理=======
//模式切换
if (!strcmp((const char *)UART1_RX_Buffer, "M1"))
{
Mode = 1;
printf("摇杆模式\r\n");
}
else if(!strcmp((const char *)UART1_RX_Buffer, "M2"))
{
Mode = 2;
printf("示教模式\r\n");
}
else if(!strcmp((const char *)UART1_RX_Buffer, "M3"))
{
Mode = 3;
printf("执行记忆动作\r\n");
}freertos.c内相关代码
和main.c的while循环一样理解就行,一样用
/* Infinite loop */
for(;;)
{
if(Mode == 1)//摇杆和蓝牙控制
{
check_sg_cmd();
}
else if(Mode == 2)//示教器控制
{
translate();
reach_target();
}
else if(Mode == 3)//动作执行
{
get_target();
reach_target();
}
if_BLE_cmd();//蓝牙指令处理
//输出PWM波使舵机运动
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, Angle(angle[0]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, Angle(angle[1]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_3, Angle(angle[2]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_4, Angle(angle[3]));
osDelay(15);//通过调整此延时可以改变机械臂运行速度
}注:
裸机开发到这里就结束了,大部分功能都简单实现出来了。
如果发现舵机运动每秒顿一次,请把每秒串口打印信息关掉就行,这是裸机的劣势之一所在。
三 FreeRTOS上完成项目
1.加入IIC的OLED屏显 和 动作执行(数组版)
下面是移植到FreeRTOS操作系统上运行,没法介绍太详细,建议先系统学一下STM32 HAL开发以及FreeRTOS,再进行。
快速简述,就是把需求分给多个任务去执行,
一个任务负责角度信息处理,
一个任务负责串口发送数据
一个任务负责OLED屏显
且这里开始把adc改成直接测8组了
接线,把OLED的SDA和SCL对应板子接好

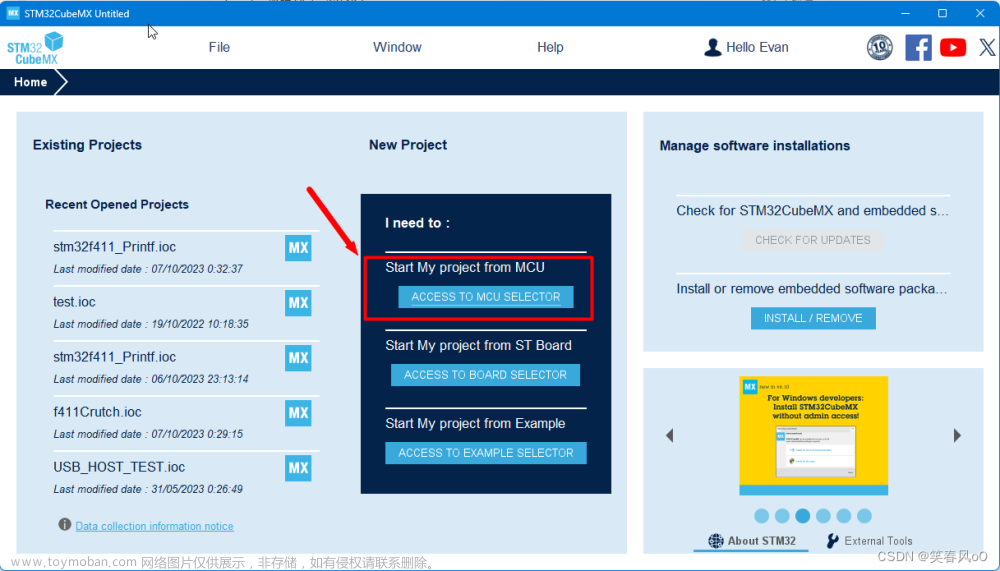
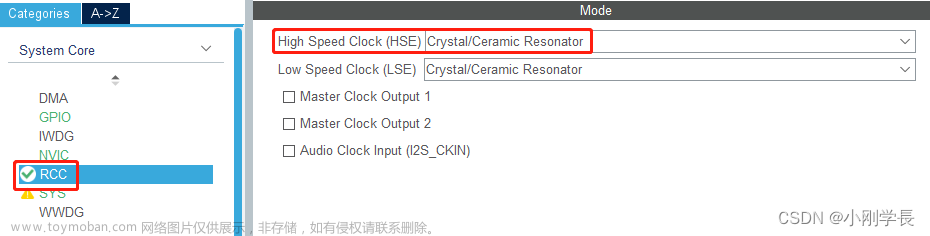
CubeMX配置:
打开IIC

设置4个外部中断,把原来的 ADC IN1~7 ==> IN2~9,因为我板载两个按钮位于A0和A1
然后B4 B5我自己外接了两个按钮。中断都是下降沿触发

FreeRTOS配置:使用了V1版本,创建三个任务,优先级都设为普通


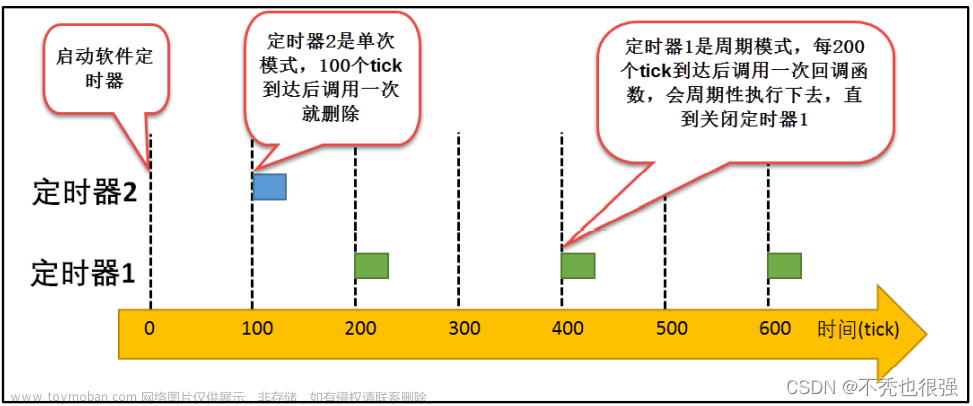
打开定时器用于两个外部中断按钮B4 B5的定时器消抖,我这两个没有硬件防抖,如果你们的按钮有电容,就不用。

使用单次定时器

代码:
usart.c
/* USER CODE BEGIN 0 */
#include "stdio.h"
#include "string.h"
#include "PWM.h"
#include "adc.h"
#include "dma.h"
/*机械臂控制模式,默认为1
1:摇杆控制
2:示教器控制
3:执行记忆动作
*/
uint8_t Mode = 1;
/*蓝牙控制机械臂指令:
s/m 停/储存当前动作
l/r 左右
u/d 上下
f/b 前后
o/c 开合*/
uint8_t cmd_BLE = 's';
extern uint16_t adc_dma[8];//DMA搬运的ADC采集值
extern uint8_t angle[4];
uint8_t k;
//覆写printf
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
//=====串口(中断)=======
//串口接收缓存(1字节)
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;
// 串口中断:接收完成回调函数,收到一个数据后,在这里处理
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 判断中断是由哪个串口触发的
if(huart->Instance == USART1)
{
// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)
if((UART1_RX_STA & 0x8000) == 0)
{
// 如果已经收到了 0x0d (回车),
if(UART1_RX_STA & 0x4000)
{
// 则接着判断是否收到 0x0a (换行)
if(buf == 0x0a)
{
// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1
UART1_RX_STA |= 0x8000;
//=======中断信息处理=======
//模式切换
if (!strcmp((const char *)UART1_RX_Buffer, "M1"))
{
Mode = 1;
printf("摇杆模式\r\n");
}
else if(!strcmp((const char *)UART1_RX_Buffer, "M2"))
{
Mode = 2;
printf("示教模式\r\n");
}
else if(!strcmp((const char *)UART1_RX_Buffer, "M3"))
{
Mode = 3;
printf("执行记忆动作\r\n");
}
//获取蓝牙控制指令
else if(UART1_RX_Buffer[0] == 'A')
{
cmd_BLE = UART1_RX_Buffer[1];
}
else {
if(UART1_RX_Buffer[0] != '\0')
printf("指令发送错误:%s\r\n", UART1_RX_Buffer);
}
//==========================
memset(UART1_RX_Buffer, 0, strlen((const char *)UART1_RX_Buffer));
// 重新开始下一次接收
UART1_RX_STA = 0;
//==========================
}
else
// 否则认为接收错误,重新开始
UART1_RX_STA = 0;
}
else // 如果没有收到了 0x0d (回车)
{
//则先判断收到的这个字符是否是 0x0d (回车)
if(buf == 0x0d)
{
// 是的话则将 bit14 位置为1
UART1_RX_STA |= 0x4000;
}
else
{
// 否则将接收到的数据保存在缓存数组里
UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;
UART1_RX_STA++;
// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > UART1_REC_LEN - 1)
UART1_RX_STA = 0;
}
}
}
// 重新开启中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
}
/* USER CODE END 0 */
/* USER CODE BEGIN USART1_Init 2 */
HAL_UART_Receive_IT(&huart1, &buf, 1);
/* USER CODE END USART1_Init 2 */
PWM.c 解释注释在前面说过
#include "PWM.h"
#include "main.h"
#include "tim.h"
#include "stdio.h"
#include "string.h"
extern uint16_t adc_dma[8];//DMA搬运的ADC采集值
extern uint8_t angle[4];//舵机角度
extern uint8_t Mode;
extern uint8_t cmd_BLE;
uint8_t memory[location_cnt][4];
uint8_t i,j = 0;
uint8_t angle_target[4] = {90,90,90,90};
uint8_t angle_target_flag = 0;
//根据输入的角度获取对应pwm占空比参数
uint8_t Angle(uint8_t pwm_pulse)
{
return pwm_pulse + 44;
}
void get_target()
{
angle_target_flag = 0;
for(j=0;j<4;j++)
{
if(angle[j] == angle_target[j]) angle_target_flag++;
}
if(angle_target_flag == 4) i++;
for(j=0;j<4;j++)
{
if(memory[i][j] == '\0')
{
i = 0;
}
angle_target[j] = memory[i][j];
}
}
void reach_target()
{
for(j = 0;j <4;j++)
{
if(angle[j] > angle_target[j])
{
angle[j]--;
}
else if(angle[j] < angle_target[j])
{
angle[j]++;
}
}
}
void translate()//根据实际情况做了一点角度矫正和限位
{
angle_target[3] = (uint8_t)((double)adc_dma[4] / 22.75)/2;
angle_target[2] = (uint8_t)((double)adc_dma[5] / 22.75);
angle_target[1] = (uint8_t)((double)adc_dma[6] / 22.75) - 10;
angle_target[0] = 180 - (uint8_t)((double)adc_dma[7] / 22.75);
if(angle_target[1]<45) angle_target[1]=45;
else if(angle_target[1]>135) angle_target[1]=135;
if(angle_target[2]<45) angle_target[1]=45;
else if(angle_target[2]>135) angle_target[1]=135;
}
//是否记录当前位置信息
void if_BLE_cmd()
{
switch(cmd_BLE)
{
case 'm':
if(i < location_cnt)
{
for(j=0;j<4;j++)
{
memory[i][j] = angle[j];
}
printf("储存动作\r\n");
cmd_BLE = 's';
i++;
}
else
{
printf("动作已满\r\n");
cmd_BLE = 's';
}
break;
case 'g':
for(i=0;i < location_cnt;i++)
{
for(j=0;j<4;j++)
{
printf("%d ",memory[i][j]);
}
printf("\r\n");
if(memory[i][j] == '\0') break;
}
cmd_BLE = 's';
break;
case 'D':
for(i=0; i < location_cnt ;i++)
{
memset(memory[i],'\0',4);
}
i = 0;
printf("已清除动作");
cmd_BLE = 's';
break;
}
}
void check_sg_cmd()
{
check_A();
check_B();
check_C();
check_D();
}
//舵机A,夹爪 CH4_B11-D1;adc4_A3
void check_A()
{
if(Mode == 1)
{
if((cmd_BLE == 'c' || adc_dma[3] > 4000) && angle[3] < 90)//合
{
angle[3]++;
}
else if((cmd_BLE == 'o' || adc_dma[3] <1000) && angle[3] > 0)//开
{
angle[3]--;
}
}
}
//舵机B,上下 CH3_B10-D2;adc3_A2
void check_B()
{
if(Mode == 1)
{
if((cmd_BLE == 'u' || adc_dma[2] <1000) && angle[2] < 135)//上
{
angle[2]++;
}
else if((cmd_BLE == 'd' || adc_dma[2] > 4000) && angle[2] > 45)//下
{
angle[2]--;
}
}
}
//舵机C,前后 CH2_B3-D3;adc2_A1
void check_C()
{
if(Mode == 1)
{
if((cmd_BLE == 'f' || adc_dma[1] <1000) && angle[1] < 135)//前
{
angle[1]++;
}
else if((cmd_BLE == 'b' || adc_dma[1] > 4000) && angle[1] > 45)//后
{
angle[1]--;
}
}
}
//舵机D,底座 CH1_A15-D0;adc1_A0
void check_D()
{
if(Mode == 1)
{
if((cmd_BLE == 'l' || adc_dma[0] <1000) && angle[0] < 180)//左
{
angle[0]++;
}
else if((cmd_BLE == 'r' || adc_dma[0] > 4000) && angle[0] > 0)//右
{
angle[0]--;
}
}
}
PWM.h
#ifndef __PWM_H__
#define __PWM_H__
#define location_cnt 20
//根据输入的角度获取对应pwm占空比参数
unsigned char Angle(unsigned char pwm_pulse);
//舵机A,夹爪 CH4_B11
void check_A(void);
//舵机B,上下 CH3_B10
void check_B(void);
//舵机C,前后 CH2_B3
void check_C(void);
//舵机D,底座 CH1_A15
void check_D(void);
void check_sg_cmd(void);
void if_BLE_cmd(void);
void translate(void);
void get_target(void);
void reach_target(void);
#endifOLED.c
#include "OLED.h"
#include "i2c.h"
#include "oledfont.h"
void Oled_Write_Cmd(uint8_t OLED_cmd)
{
HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x00, I2C_MEMADD_SIZE_8BIT, &OLED_cmd, 1, 0xff);
}
void Oled_Write_Data(uint8_t OLED_data)
{
HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x40, I2C_MEMADD_SIZE_8BIT, &OLED_data, 1, 0xff);
}
//OLED初始化代码,直接复制粘贴
void Oled_Init(void){
Oled_Write_Cmd(0xAE);//--display off
Oled_Write_Cmd(0x00);//---set low column address
Oled_Write_Cmd(0x10);//---set high column address
Oled_Write_Cmd(0x40);//--set start line address
Oled_Write_Cmd(0xB0);//--set page address
Oled_Write_Cmd(0x81); // contract control
Oled_Write_Cmd(0xFF);//--128
Oled_Write_Cmd(0xA1);//set segment remap
Oled_Write_Cmd(0xA6);//--normal / reverse
Oled_Write_Cmd(0xA8);//--set multiplex ratio(1 to 64)
Oled_Write_Cmd(0x3F);//--1/32 duty
Oled_Write_Cmd(0xC8);//Com scan direction
Oled_Write_Cmd(0xD3);//-set display offset
Oled_Write_Cmd(0x00);//
Oled_Write_Cmd(0xD5);//set osc division
Oled_Write_Cmd(0x80);//
Oled_Write_Cmd(0xD8);//set area color mode off
Oled_Write_Cmd(0x05);//
Oled_Write_Cmd(0xD9);//Set Pre-Charge Period
Oled_Write_Cmd(0xF1);//
Oled_Write_Cmd(0xDA);//set com pin configuartion
Oled_Write_Cmd(0x12);//
Oled_Write_Cmd(0xDB);//set Vcomh
Oled_Write_Cmd(0x30);//
Oled_Write_Cmd(0x8D);//set charge pump enable
Oled_Write_Cmd(0x14);//
Oled_Write_Cmd(0xAF);//--turn on oled panel
}
void Oled_Clear()
{
unsigned char i,j; //-128 --- 127
for(i=0;i<8;i++){
Oled_Write_Cmd(0xB0 + i);//page0--page7
//每个page从0列
Oled_Write_Cmd(0x00);
Oled_Write_Cmd(0x10);
//0到127列,依次写入0,每写入数据,列地址自动偏移
for(j = 0;j<128;j++){
Oled_Write_Data(0);
}
}
}
//在屏幕上显示
//===============================官方提供的代码============================================
void Oled_Show_Char(char row,char col,uint8_t oledChar){ //row*2-2
unsigned int i;
Oled_Write_Cmd(0xb0+(row*2-2)); //page 0
Oled_Write_Cmd(0x00+(col&0x0f)); //low
Oled_Write_Cmd(0x10+(col>>4)); //high
for(i=((oledChar-32)*16);i<((oledChar-32)*16+8);i++){
Oled_Write_Data(F8X16[i]); //写数据oledTable1
}
Oled_Write_Cmd(0xb0+(row*2-1)); //page 1
Oled_Write_Cmd(0x00+(col&0x0f)); //low
Oled_Write_Cmd(0x10+(col>>4)); //high
for(i=((oledChar-32)*16+8);i<((oledChar-32)*16+8+8);i++){
Oled_Write_Data(F8X16[i]); //写数据oledTable1
}
}
/******************************************************************************/
// 函数名称:Oled_Show_Char
// 输入参数:oledChar
// 输出参数:无
// 函数功能:OLED显示单个字符
/******************************************************************************/
void Oled_Show_Str(char row,char col,char *str){
while(*str!=0){
Oled_Show_Char(row,col,*str);
str++;
col += 8;
}
}
OLED.h
#ifndef __OLED_H__
#define __OLED_H__
void Oled_Init(void);
void Oled_Clear(void);
void Oled_Show_Str(char row,char col,char *str);
#endifmain.c 放了一点初始化配置
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
uint16_t adc_dma[8];//DMA搬运的ADC采集值
uint8_t angle[4] = {90,90,90,90};//舵机角度
/* USER CODE END PV */
/* USER CODE BEGIN 2 */
// 开启接收中断
printf("Start\r\n");//程序开始运行
HAL_ADC_Start_DMA(&hadc1,(uint32_t *)adc_dma,8); //开启ADC和DMA
//系统稳定半秒
HAL_Delay(500);
/* USER CODE END 2 */freeRTOS.c
uint8_t anti_shake = 0;//定时器按钮消抖标志位
最下面的函数就是外部中断回调函数,anti_shake为0才能通过判断,一旦进入就将anti_shake置为1,避免因为按下的抖动导致按一次触发好几次中断。通过判断之后,启动单次定时器800ms,定时器到时间后触发定时器中断回调函数,在这里再把anti_shake重新置为0。
其中由于我的板载按键0和1本身有硬件消抖,所以不用软件定时器消抖。
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "PWM.h"
#include "tim.h"
#include "adc.h"
#include "OLED.h"
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
uint8_t anti_shake = 0;//定时器按钮消抖标志位
extern uint16_t adc_dma[8];//DMA搬运的ADC采集值
extern uint8_t angle[4];//舵机角度
extern uint8_t Mode;
extern uint8_t memory[location_cnt][4];
extern uint8_t i,j;
//角度信息字符串
char speedMes[8]; //IIC发送角度数据的字符串缓冲区
char speedMes1[8];
char speedMes2[8];
char speedMes3[8];
char speedMes4[8];
char speedMes5[8];
/* USER CODE END Variables */
/* USER CODE BEGIN Header_Start_check_angle */
/**
* @brief Function implementing the check_angle thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_Start_check_angle */
void Start_check_angle(void const * argument)
{
/* USER CODE BEGIN Start_check_angle */
//开启4路PWM
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_4);
/* Infinite loop */
for(;;)
{
if(Mode == 1)
{
check_sg_cmd();
}
else if(Mode == 2)
{
translate();
reach_target();
}
else if(Mode == 3)
{
get_target();
reach_target();
}
if_BLE_cmd();
//输出PWM波使舵机运动
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, Angle(angle[0]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, Angle(angle[1]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_3, Angle(angle[2]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_4, Angle(angle[3]));
osDelay(15);//通过调整此延时可以改变机械臂运行速度
}
/* USER CODE END Start_check_angle */
}
/* USER CODE BEGIN Header_Start_usart_show */
/**
* @brief Function implementing the usart_show thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_Start_usart_show */
void Start_usart_show(void const * argument)
{
/* USER CODE BEGIN Start_usart_show */
/* Infinite loop */
for(;;)
{
printf("Angle = {%d, %d, %d, %d}\r\n",angle[0],angle[1],angle[2],angle[3]);
printf("adc_dma1 = {%d, %d, %d, %d}\r\n",adc_dma[0],adc_dma[1],adc_dma[2],adc_dma[3]);
printf("adc_dma2 = {%d, %d, %d, %d}\r\n",adc_dma[4],adc_dma[5],adc_dma[6],adc_dma[7]);
printf("\r\n");
osDelay(1000);
}
/* USER CODE END Start_usart_show */
}
/* USER CODE BEGIN Header_Start_OLED_Task */
/**
* @brief Function implementing the OLED_Task thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_Start_OLED_Task */
void Start_OLED_Task(void const * argument)
{
/* USER CODE BEGIN Start_OLED_Task */
Oled_Init();
Oled_Clear();
/* Infinite loop */
for(;;)
{
//串口数据的字符串拼装,speed是格子,每个格子1cm
sprintf(speedMes,"A: %d ",angle[0]);
sprintf(speedMes1,"B: %d ",angle[1]);
sprintf(speedMes2,"C: %d ",angle[2]);
sprintf(speedMes3,"D: %d ",angle[3]);
sprintf(speedMes4,"Mode %d ",Mode);
sprintf(speedMes5,"S %d ",i);
Oled_Show_Str(1,5,speedMes);
Oled_Show_Str(1,69,speedMes1);
Oled_Show_Str(2,5,speedMes2);
Oled_Show_Str(2,69,speedMes3);
Oled_Show_Str(4,0,speedMes4);
Oled_Show_Str(4,64,speedMes5);
osDelay(500);
}
/* USER CODE END Start_OLED_Task */
}
/* Callback01 function */
void Callback01(void const * argument)
{
/* USER CODE BEGIN Callback01 */
anti_shake = 0;
/* USER CODE END Callback01 */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
switch(GPIO_Pin)
{
case GPIO_PIN_0:
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_SET);
Mode = 1;
printf("摇杆模式\r\n");
break;
case GPIO_PIN_1:
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);
Mode = 2;
printf("示教模式\r\n");
break;
case GPIO_PIN_4:
if(anti_shake == 0)
{
anti_shake = 1;
osTimerStart(myTimer01Handle,800);
if(i<location_cnt)
{
for(j=0;j<4;j++)
{
memory[i][j] = angle[j];
}
printf("储存动作\r\n");
i++;
}
else if(i>=9)
{
printf("动作已满\r\n");
}
}
case GPIO_PIN_5:
if(anti_shake == 0)
{
anti_shake = 1;
Mode = 3;
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);
printf("执行记忆动作\r\n");
osTimerStart(myTimer01Handle,800);
}
}
}
/* USER CODE END Application */
2.链表的增删遍历实现动作记忆和执行
创建 Memary_LinkList.c和.h文件,放链表相关代码
#include "Memary_LinkList.h"
#include "main.h"
#include "stdio.h"
#include <stdlib.h>
struct Memary//每个链表节点的结构组成
{
uint8_t A,B,C,D,cnt;//四个角度和节点的对应编号
struct Memary *next;//下一个链表节点的地址
}*head,*tail,*temp;//声明三个指针,分别指向链表头尾,和一个临时指针
void Memary_Init()//初始化链表
{
head = (struct Memary *)malloc(sizeof(struct Memary));
head -> cnt = 0;//链表里没记忆信息时编号只有0
head -> next = NULL;
tail = head;
temp = head;
}
void prinrt_List()//打印整个链表的内容
{
temp = head;
while(1)
{
printf("%d:{%d,%d,%d,%d}\r\n",temp->cnt,temp->A,temp->B,temp->C,temp->D);
if(temp->next != NULL) temp = temp->next;
else break;
}
}
void delete_List()//清空整个链表
{
while(head->next != NULL)
{
temp = head;
head = head->next;
free(temp);
}
temp = head;
head->cnt = 0;
}
void addNode(uint8_t angle[4])//记忆动作,即新增一个节点
{
if(head->cnt != 0)//编号cnt从1开始,从头节点开始存数据
{
struct Memary *p = (struct Memary *)malloc(sizeof(struct Memary));
tail->next = p;
p->cnt = tail->cnt;
tail = p;
}
tail->A = angle[0];
tail->B = angle[1];
tail->C = angle[2];
tail->D = angle[3];
tail->cnt++;
temp = tail;
}
uint8_t angle_temp[4];//用于提取记忆的角度
uint8_t *p = angle_temp;//用指针传递
uint8_t *getNode()//把记忆信息传出去,自动循环传整个链表
{
angle_temp[0] = temp->A;
angle_temp[1] = temp->B;
angle_temp[2] = temp->C;
angle_temp[3] = temp->D;
if(temp->next == NULL)
temp = head;
else
temp = temp->next;
return p;
}
uint8_t sizeof_List()//别管名字,看temp在哪用的,
{
//反应在OLED上就是可以看见当前存储到第几个动作了或者正在执行第一个动作
return temp->cnt;
}
#ifndef __MEMARY_LINKLIST__
#define __MEMARY_LINKLIST__
#include "main.h"
void Memary_Init(void);
void addNode(uint8_t angle[4]);
void prinrt_List(void);
void delete_List(void);
uint8_t *getNode(void);
uint8_t sizeof_List(void);
#endif
原PWM.c改成了MG90s.c
#include "MG90s.h"
#include "main.h"
#include "tim.h"
#include "stdio.h"
#include "string.h"
#include "Memary_LinkList.h"
extern uint16_t adc_dma[8];//DMA搬运的ADC采集值
extern uint8_t angle[4];//舵机角度
extern uint8_t Mode;
extern uint8_t cmd_BLE;
uint8_t i;
uint8_t angle_target[4] = {90,90,90,90};
uint8_t *p_angle_target;
uint8_t angle_target_flag = 4;//默认第一次为4
//根据输入的角度获取对应pwm占空比参数
uint8_t Angle(uint8_t pwm_pulse)
{
return pwm_pulse + 44;
}
void getAngleFromMemary()
{
if(angle_target_flag == 4)
{
p_angle_target = getNode();
for(i = 0;i <4;i++)
{
angle_target[i] = *(p_angle_target + i);
}
}
angle_target_flag = 0;
for(i=0;i<4;i++)
{
if(angle[i] == angle_target[i]) angle_target_flag++;
}
}
void reach_target()
{
for(i = 0;i <4;i++)
{
if(angle[i] > angle_target[i])
{
angle[i]--;
}
else if(angle[i] < angle_target[i])
{
angle[i]++;
}
}
}
void translate()
{
angle_target[3] = (uint8_t)((double)adc_dma[4] / 22.75)/2;
angle_target[2] = (uint8_t)((double)adc_dma[5] / 22.75);
angle_target[1] = (uint8_t)((double)adc_dma[6] / 22.75) - 10;
angle_target[0] = 180 - (uint8_t)((double)adc_dma[7] / 22.75);
if(angle_target[1]<45) angle_target[1]=45;
else if(angle_target[1]>135) angle_target[1]=135;
if(angle_target[2]<45) angle_target[1]=45;
else if(angle_target[2]>135) angle_target[1]=135;
}
//是否记录当前位置信息
void if_BLE_cmd()
{
switch(cmd_BLE)
{
case 'm':
addNode(angle);
printf("储存动作\r\n");
cmd_BLE = 's';
break;
case 'g':
prinrt_List();
cmd_BLE = 's';
break;
case 'D':
delete_List();
printf("已清除动作\r\n");
cmd_BLE = 's';
break;
}
}
void check_sg_cmd()
{
check_A();
check_B();
check_C();
check_D();
}
//舵机A,夹爪 CH4_B11-D1;adc4_A3
void check_A()
{
if(Mode == 1)
{
if((cmd_BLE == 'c' || adc_dma[3] > 4000) && angle[3] < 90)//合
{
angle[3]++;
}
else if((cmd_BLE == 'o' || adc_dma[3] <1000) && angle[3] > 0)//开
{
angle[3]--;
}
}
}
//舵机B,上下 CH3_B10-D2;adc3_A2
void check_B()
{
if(Mode == 1)
{
if((cmd_BLE == 'u' || adc_dma[2] <1000) && angle[2] < 135)//上
{
angle[2]++;
}
else if((cmd_BLE == 'd' || adc_dma[2] > 4000) && angle[2] > 45)//下
{
angle[2]--;
}
}
}
//舵机C,前后 CH2_B3-D3;adc2_A1
void check_C()
{
if(Mode == 1)
{
if((cmd_BLE == 'f' || adc_dma[1] <1000) && angle[1] < 135)//前
{
angle[1]++;
}
else if((cmd_BLE == 'b' || adc_dma[1] > 4000) && angle[1] > 45)//后
{
angle[1]--;
}
}
}
//舵机D,底座 CH1_A15-D0;adc1_A0
void check_D()
{
if(Mode == 1)
{
if((cmd_BLE == 'l' || adc_dma[0] <1000) && angle[0] < 180)//左
{
angle[0]++;
}
else if((cmd_BLE == 'r' || adc_dma[0] > 4000) && angle[0] > 0)//右
{
angle[0]--;
}
}
}
FreeRTOS.c要修改的部分
// 任务1
/* USER CODE END Header_Start_check_angle */
void Start_check_angle(void const * argument)
{
/* USER CODE BEGIN Start_check_angle */
Memary_Init();
//开启4路PWM
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_4);
/* Infinite loop */
for(;;)
{
if(Mode == 1)
{
check_sg_cmd();
}
else if(Mode == 2)
{
translate();
reach_target();
}
else if(Mode == 3)
{
getAngleFromMemary();
reach_target();
}
if_BLE_cmd();
//输出PWM波使舵机运动
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, Angle(angle[0]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, Angle(angle[1]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_3, Angle(angle[2]));
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_4, Angle(angle[3]));
osDelay(18);//通过调整此延时可以改变机械臂运行速度
}
/* USER CODE END Start_check_angle */
}
// 任务3
/* USER CODE END Header_Start_OLED_Task */
void Start_OLED_Task(void const * argument)
{
/* USER CODE BEGIN Start_OLED_Task */
Oled_Init();
Oled_Clear();
/* Infinite loop */
for(;;)
{
//串口数据的字符串拼装,speed是格子,每个格子1cm
sprintf(speedMes,"A: %d ",angle[0]);
sprintf(speedMes1,"B: %d ",angle[1]);
sprintf(speedMes2,"C: %d ",angle[2]);
sprintf(speedMes3,"D: %d ",angle[3]);
sprintf(speedMes4,"Mode %d ",Mode);
sprintf(speedMes5,"S %d ",sizeof_List());
Oled_Show_Str(1,5,speedMes);
Oled_Show_Str(1,69,speedMes1);
Oled_Show_Str(2,5,speedMes2);
Oled_Show_Str(2,69,speedMes3);
Oled_Show_Str(4,0,speedMes4);
Oled_Show_Str(4,54,speedMes5);
osDelay(500);
}
/* USER CODE END Start_OLED_Task */
}
// 外部中断
case GPIO_PIN_4:
if(anti_shake == 0)
{
anti_shake = 1;
osTimerStart(myTimer01Handle,800);
addNode(angle);
printf("储存动作\r\n");
}到这里位置,视频里我实现的内容都可以完成了。
至于这个链表最大能存多长的动作我是没去实测,反正我们玩绝对是够用了。
3.SPI扩容
不幸的是我板子的SPI2坏了,只有SPI1正常,所以我没真正去完成这个功能。
但是这里我提供了完整的存储思路。大家可自己来实现
功能测试
PB12设为GPIO输出引脚默认设为高电平,充当CS口,接线就是CS对CS,SCK对CLK,MOSI对DI,MISO对DO
VCC用3.3,5v没试过。
在spi.c中添加 比如如果SPI1就是hspi1,SPI2就是hspi2,别的都不用动
/* USER CODE BEGIN 1 */
uint8_t spi2_read_write_byte(uint8_t data)
{
uint8_t rec_data = 0;
HAL_SPI_TransmitReceive(&hspi2, &data, &rec_data, 1, 1000);
return rec_data;
}
/* USER CODE END 1 */spi.h
/* USER CODE BEGIN Prototypes */
uint8_t spi2_read_write_byte(uint8_t data);
/* USER CODE END Prototypes */w25q128.h 这里你CS用的哪个GPIO_OUT,W25Q128_CS_GPIO就改成对应的。
#ifndef __W25Q128_H__
#define __W25Q128_H__
#include "stdint.h"
/* W25Q128片选引脚定义 */
#define W25Q128_CS_GPIO_PORT GPIOB
#define W25Q128_CS_GPIO_PIN GPIO_PIN_12
/* W25Q128片选信号 */
#define W25Q128_CS(x) do{ x ? \
HAL_GPIO_WritePin(W25Q128_CS_GPIO_PORT, W25Q128_CS_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(W25Q128_CS_GPIO_PORT, W25Q128_CS_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
/* FLASH芯片列表 */
#define W25Q128 0XEF17 /* W25Q128 芯片ID */
/* 指令表 */
#define FLASH_WriteEnable 0x06
#define FLASH_ReadStatusReg1 0x05
#define FLASH_ReadData 0x03
#define FLASH_PageProgram 0x02
#define FLASH_SectorErase 0x20
#define FLASH_ChipErase 0xC7
#define FLASH_ManufactDeviceID 0x90
/* 静态函数 */
static void w25q128_wait_busy(void); /* 等待空闲 */
static void w25q128_send_address(uint32_t address);/* 发送地址 */
static void w25q128_write_page(uint8_t *pbuf, uint32_t addr, uint16_t datalen); /* 写入page */
static void w25q128_write_nocheck(uint8_t *pbuf, uint32_t addr, uint16_t datalen); /* 写flash,不带擦除 */
/* 普通函数 */
void w25q128_init(void); /* 初始化25QXX */
uint16_t w25q128_read_id(void); /* 读取FLASH ID */
void w25q128_write_enable(void); /* 写使能 */
uint8_t w25q128_rd_sr1(void); /* 读取寄存器1的值 */
void w25q128_erase_chip(void); /* 整片擦除 */
void w25q128_erase_sector(uint32_t saddr); /* 扇区擦除 */
void w25q128_read(uint8_t *pbuf, uint32_t addr, uint16_t datalen); /* 读取flash */
void w25q128_write(uint8_t *pbuf, uint32_t addr, uint16_t datalen); /* 写入flash */
#endif
w25q128.c
#include "w25q128.h"
#include "spi.h"
#include "stdio.h"
/**
* @brief 初始化W25Q128
* @param 无
* @retval 无
*/
void w25q128_init(void)
{
uint16_t flash_type;
spi2_read_write_byte(0xFF); /* 清除DR的作用 */
W25Q128_CS(1);
flash_type = w25q128_read_id(); /* 读取FLASH ID. */
if (flash_type == W25Q128)
printf("检测到W25Q128芯片\r\n");
else
printf("读取到的芯片ID为:%x\r\n",flash_type);
printf("未检测到W25Q128芯片\r\n");
}
/**
* @brief 等待空闲
* @param 无
* @retval 无
*/
static void w25q128_wait_busy(void)
{
while ((w25q128_rd_sr1() & 0x01) == 0x01); /* 等待BUSY位清空 */
}
/**
* @brief 读取W25Q128的状态寄存器1的值
* @param 无
* @retval 状态寄存器值
*/
uint8_t w25q128_rd_sr1(void)
{
uint8_t rec_data = 0;
W25Q128_CS(0);
spi2_read_write_byte(FLASH_ReadStatusReg1); /* 读状态寄存器1 */
rec_data = spi2_read_write_byte(0xFF);
W25Q128_CS(1);
return rec_data;
}
/**
* @brief W25Q128写使能
* @note 将S1寄存器的WEL置位
* @param 无
* @retval 无
*/
void w25q128_write_enable(void)
{
W25Q128_CS(0);
spi2_read_write_byte(FLASH_WriteEnable); /* 发送写使能 */
W25Q128_CS(1);
}
/**
* @brief W25Q128发送地址
* @param address : 要发送的地址
* @retval 无
*/
static void w25q128_send_address(uint32_t address)
{
spi2_read_write_byte((uint8_t)((address)>>16)); /* 发送 bit23 ~ bit16 地址 */
spi2_read_write_byte((uint8_t)((address)>>8)); /* 发送 bit15 ~ bit8 地址 */
spi2_read_write_byte((uint8_t)address); /* 发送 bit7 ~ bit0 地址 */
}
/**
* @brief 擦除整个芯片
* @note 等待时间超长...
* @param 无
* @retval 无
*/
void w25q128_erase_chip(void)
{
w25q128_write_enable(); /* 写使能 */
w25q128_wait_busy(); /* 等待空闲 */
W25Q128_CS(0);
spi2_read_write_byte(FLASH_ChipErase); /* 发送读寄存器命令 */
W25Q128_CS(1);
w25q128_wait_busy(); /* 等待芯片擦除结束 */
}
/**
* @brief 擦除一个扇区
* @note 注意,这里是扇区地址,不是字节地址!!
* 擦除一个扇区的最少时间:150ms
*
* @param saddr : 扇区地址 根据实际容量设置
* @retval 无
*/
void w25q128_erase_sector(uint32_t saddr)
{
//printf("fe:%x\r\n", saddr); /* 监视falsh擦除情况,测试用 */
saddr *= 4096;
w25q128_write_enable(); /* 写使能 */
w25q128_wait_busy(); /* 等待空闲 */
W25Q128_CS(0);
spi2_read_write_byte(FLASH_SectorErase); /* 发送写页命令 */
w25q128_send_address(saddr); /* 发送地址 */
W25Q128_CS(1);
w25q128_wait_busy(); /* 等待扇区擦除完成 */
}
/**
* @brief 读取芯片ID
* @param 无
* @retval FLASH芯片ID
* @note 芯片ID列表见: w25q128.h, 芯片列表部分
*/
uint16_t w25q128_read_id(void)
{
uint16_t deviceid;
W25Q128_CS(0);
spi2_read_write_byte(FLASH_ManufactDeviceID); /* 发送读 ID 命令 */
spi2_read_write_byte(0); /* 写入一个字节 */
spi2_read_write_byte(0);
spi2_read_write_byte(0);
deviceid = spi2_read_write_byte(0xFF) << 8; /* 读取高8位字节 */
deviceid |= spi2_read_write_byte(0xFF); /* 读取低8位字节 */
W25Q128_CS(1);
return deviceid;
}
/**
* @brief 读取SPI FLASH
* @note 在指定地址开始读取指定长度的数据
* @param pbuf : 数据存储区
* @param addr : 开始读取的地址(最大32bit)
* @param datalen : 要读取的字节数(最大65535)
* @retval 无
*/
void w25q128_read(uint8_t *pbuf, uint32_t addr, uint16_t datalen)
{
uint16_t i;
W25Q128_CS(0);
spi2_read_write_byte(FLASH_ReadData); /* 发送读取命令 */
w25q128_send_address(addr); /* 发送地址 */
for(i=0;i<datalen;i++)
{
pbuf[i] = spi2_read_write_byte(0XFF); /* 循环读取 */
}
W25Q128_CS(1);
}
/**
* @brief SPI在一页(0~65535)内写入少于256个字节的数据
* @note 在指定地址开始写入最大256字节的数据
* @param pbuf : 数据存储区
* @param addr : 开始写入的地址(最大32bit)
* @param datalen : 要写入的字节数(最大256),该数不应该超过该页的剩余字节数!!!
* @retval 无
*/
static void w25q128_write_page(uint8_t *pbuf, uint32_t addr, uint16_t datalen)
{
uint16_t i;
w25q128_write_enable(); /* 写使能 */
W25Q128_CS(0);
spi2_read_write_byte(FLASH_PageProgram); /* 发送写页命令 */
w25q128_send_address(addr); /* 发送地址 */
for(i=0;i<datalen;i++)
{
spi2_read_write_byte(pbuf[i]); /* 循环写入 */
}
W25Q128_CS(1);
w25q128_wait_busy(); /* 等待写入结束 */
}
/**
* @brief 无检验写SPI FLASH
* @note 必须确保所写的地址范围内的数据全部为0XFF,否则在非0XFF处写入的数据将失败!
* 具有自动换页功能
* 在指定地址开始写入指定长度的数据,但是要确保地址不越界!
*
* @param pbuf : 数据存储区
* @param addr : 开始写入的地址(最大32bit)
* @param datalen : 要写入的字节数(最大65535)
* @retval 无
*/
static void w25q128_write_nocheck(uint8_t *pbuf, uint32_t addr, uint16_t datalen)
{
uint16_t pageremain;
pageremain = 256 - addr % 256; /* 单页剩余的字节数 */
if (datalen <= pageremain) /* 不大于256个字节 */
{
pageremain = datalen;
}
while (1)
{
/* 当写入字节比页内剩余地址还少的时候, 一次性写完
* 当写入直接比页内剩余地址还多的时候, 先写完整个页内剩余地址, 然后根据剩余长度进行不同处理
*/
w25q128_write_page(pbuf, addr, pageremain);
if (datalen == pageremain) /* 写入结束了 */
{
break;
}
else /* datalen > pageremain */
{
pbuf += pageremain; /* pbuf指针地址偏移,前面已经写了pageremain字节 */
addr += pageremain; /* 写地址偏移,前面已经写了pageremain字节 */
datalen -= pageremain; /* 写入总长度减去已经写入了的字节数 */
if (datalen > 256) /* 剩余数据还大于一页,可以一次写一页 */
{
pageremain = 256; /* 一次可以写入256个字节 */
}
else /* 剩余数据小于一页,可以一次写完 */
{
pageremain = datalen; /* 不够256个字节了 */
}
}
}
}
/**
* @brief 写SPI FLASH
* @note 在指定地址开始写入指定长度的数据 , 该函数带擦除操作!
* SPI FLASH 一般是: 256个字节为一个Page, 4Kbytes为一个Sector, 16个扇区为1个Block
* 擦除的最小单位为Sector.
*
* @param pbuf : 数据存储区
* @param addr : 开始写入的地址(最大32bit)
* @param datalen : 要写入的字节数(最大65535)
* @retval 无
*/
uint8_t g_w25q128_buf[4096]; /* 扇区缓存 */
void w25q128_write(uint8_t *pbuf, uint32_t addr, uint16_t datalen)
{
uint32_t secpos;
uint16_t secoff;
uint16_t secremain;
uint16_t i;
uint8_t *w25q128_buf;
w25q128_buf = g_w25q128_buf;
secpos = addr / 4096; /* 扇区地址 */
secoff = addr % 4096; /* 在扇区内的偏移 */
secremain = 4096 - secoff; /* 扇区剩余空间大小 */
//printf("ad:%X,nb:%X\r\n", addr, datalen); /* 测试用 */
if (datalen <= secremain)
{
secremain = datalen; /* 不大于4096个字节 */
}
while (1)
{
w25q128_read(w25q128_buf, secpos * 4096, 4096); /* 读出整个扇区的内容 */
for (i = 0; i < secremain; i++) /* 校验数据 */
{
if (w25q128_buf[secoff + i] != 0XFF)
{
break; /* 需要擦除, 直接退出for循环 */
}
}
if (i < secremain) /* 需要擦除 */
{
w25q128_erase_sector(secpos); /* 擦除这个扇区 */
for (i = 0; i < secremain; i++) /* 复制 */
{
w25q128_buf[i + secoff] = pbuf[i];
}
w25q128_write_nocheck(w25q128_buf, secpos * 4096, 4096); /* 写入整个扇区 */
}
else /* 写已经擦除了的,直接写入扇区剩余区间. */
{
w25q128_write_nocheck(pbuf, addr, secremain); /* 直接写扇区 */
}
if (datalen == secremain)
{
break; /* 写入结束了 */
}
else /* 写入未结束 */
{
secpos++; /* 扇区地址增1 */
secoff = 0; /* 偏移位置为0 */
pbuf += secremain; /* 指针偏移 */
addr += secremain; /* 写地址偏移 */
datalen -= secremain; /* 字节数递减 */
if (datalen > 4096)
{
secremain = 4096; /* 下一个扇区还是写不完 */
}
else
{
secremain = datalen;/* 下一个扇区可以写完了 */
}
}
}
}
main函数里用这段代码测试
/* USER CODE BEGIN 2 */
w25q128_init();
/* 写入测试数据 */
sprintf((char *)datatemp, "stm32f103c8t6");
w25q128_write(datatemp, FLASH_WriteAddress, TEXT_SIZE);
printf("数据写入完成!\r\n");
/* 读出测试数据 */
memset(datatemp, 0, TEXT_SIZE);
w25q128_read(datatemp, FLASH_ReadAddress, TEXT_SIZE);
printf("读出数据:%s\r\n", datatemp);
/* USER CODE END 2 */运行结果第一句首先一定是都没读取到 w25q128 这个芯片,这段判断代码在w25q128_init();里
w25q128芯片分析与功能实现
以前在这个文章里讲过
STM32:SPI_我有在好好学习的博客-CSDN博客
总之, 整个存储空间的组成是
256个Block * 16个Sector * 16个Page * 256个字节 = 共16MB
而我们代码增删改查储存信息的单位是按照Sector为单位的,即一个扇区一个扇区的处理信息
阅读官方的芯片手册:

可知存储地址为六位十六进制,刚好对应16MB
0 0 0 0 0 0
前两位表示BLOCK,16*16 即256个Block
第三位对应Sector,16个
第四位对应Page,16个
五六位对应16*16 即256个字节
所以通过设置这个六位的地址,我们就可以决定把数据存在哪个扇区
例如 3FD000 ,就表示第63Block的第13个Sector,又因为我们是按照Sector操作的
所以通过前三位来选择不同的扇区来存数据文章来源:https://www.toymoban.com/news/detail-657487.html
存和读都是字符串形式。写两个函数分别把字符串转化为链表,链表转化为字符串即可。文章来源地址https://www.toymoban.com/news/detail-657487.html
到了这里,关于基于STM32+FreeRTOS的四轴机械臂的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!