STM32CubeMx配置定时器的编码器模式
上次文章写了编码器是如何工作的,今天就来用STM32F103C8T6的TIM3的通道1跟通道2编写一个编码器识别程序。
编程思路:
A相:TIM3_CH1
B相:TIM3_CH2
SWITCH:PB5(外部中断的方式)
实现效果:
编码器顺时针旋转编码器计数值 +1
编码器逆时针旋转编码器计数值 -1
按下SWITCH编码器计数值值清 0
话不多说,上教程!
1.配置时钟
- 选择外部高速时钟源HSE

2.配置SWITCH管脚为外部中断模式(默认上拉)
-
选择中断模式触发下降沿有效
-
默认是上拉输入
-
添加用户标签为SWITCH
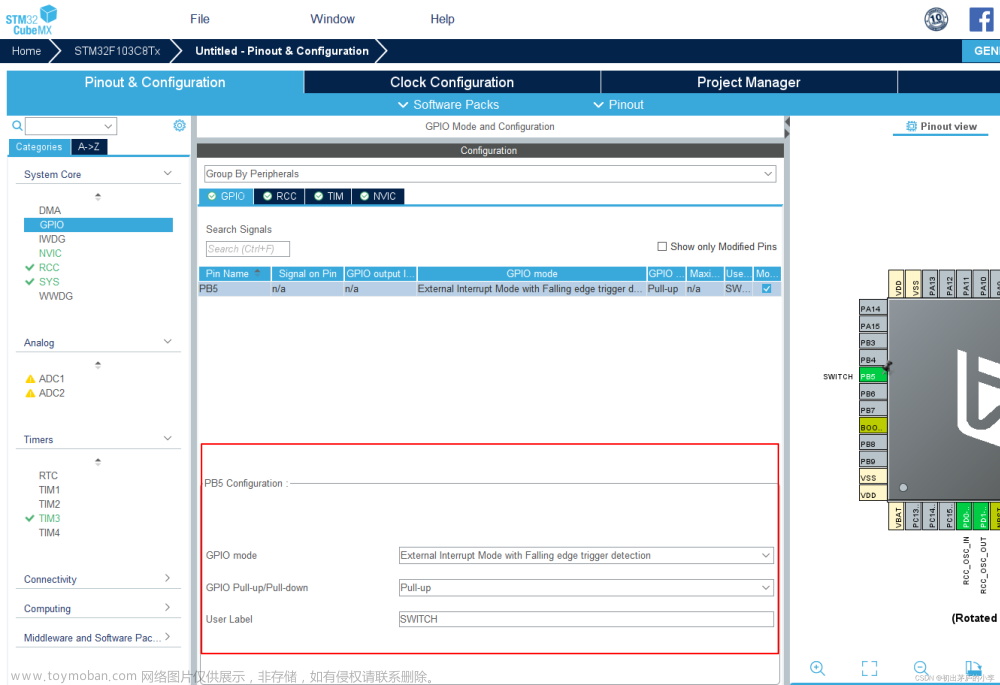
使能NVIC配置

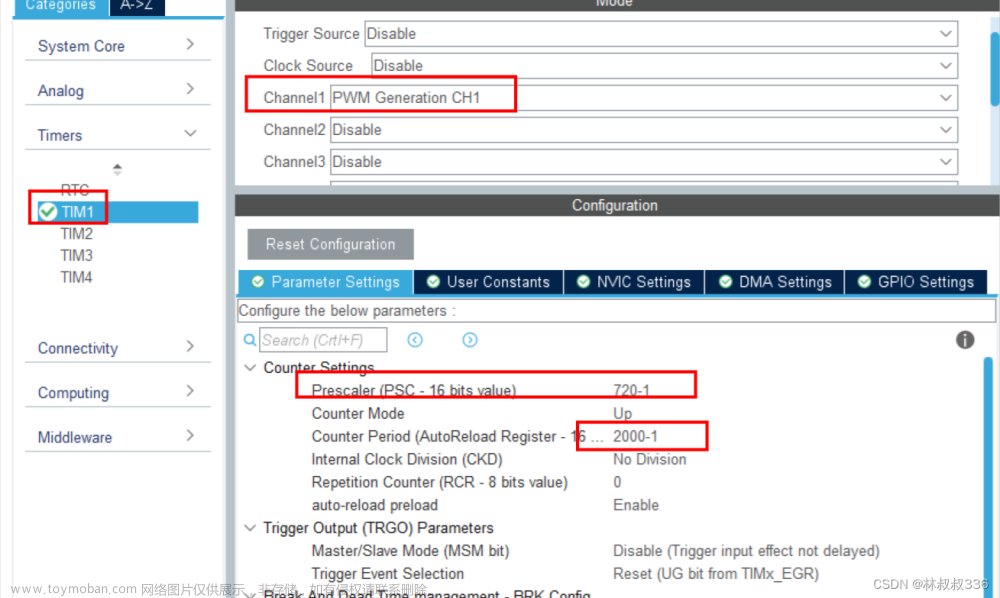
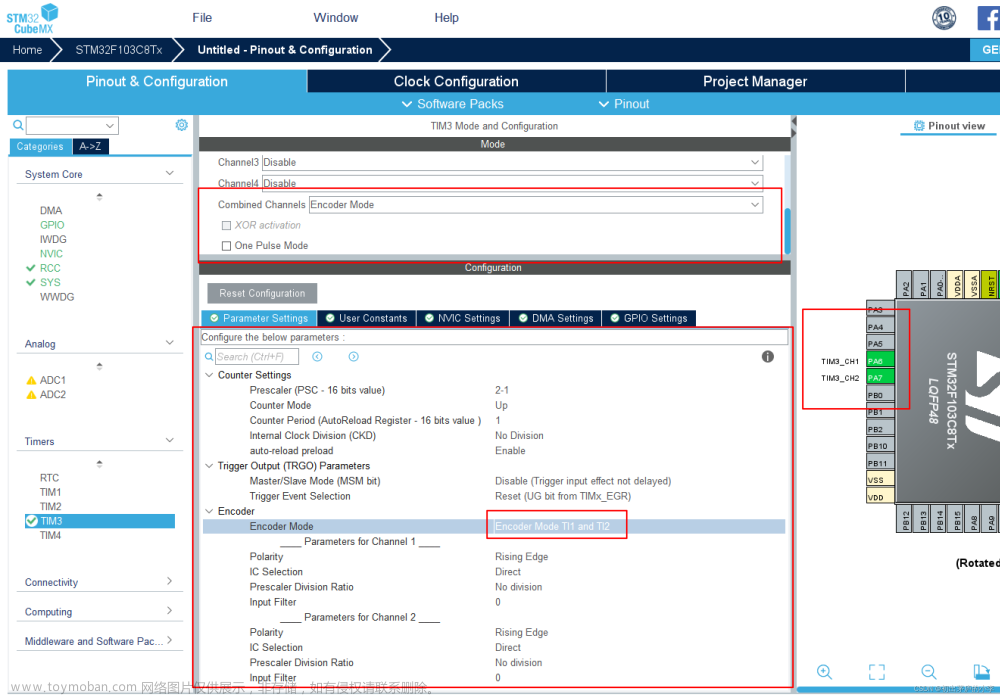
3.配置定时器管脚为编码器模式
- 选择编码器模式
- 分频值设置为2-1
- 计数值设置为1
- 自动重装在值1
- 自动重载使能
- 通道1,2都计数
- 都是上升沿有效
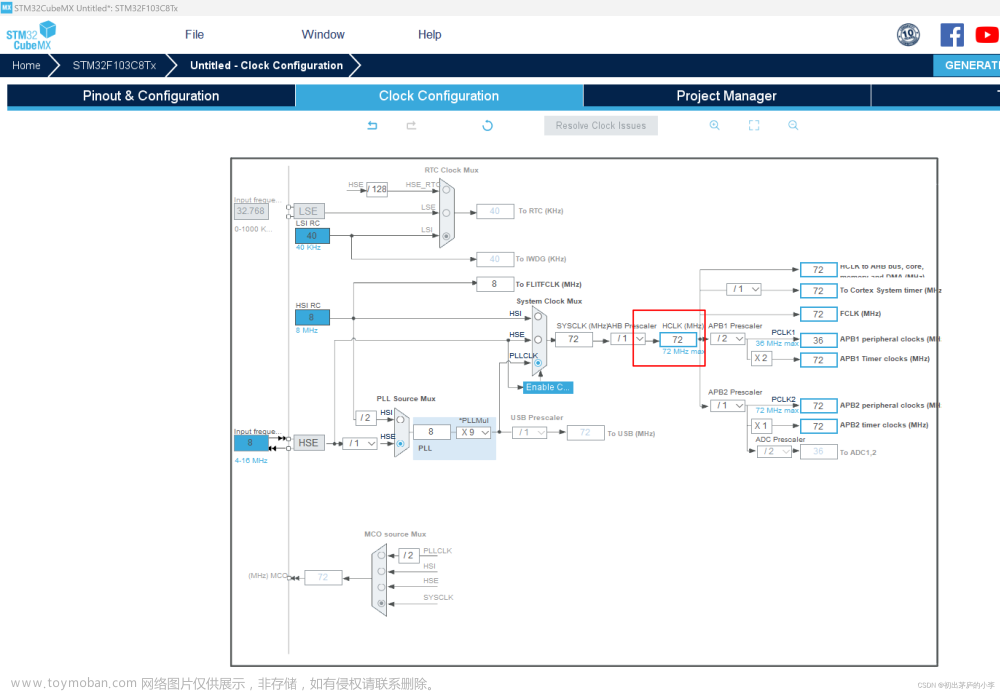
4.配置时钟到72MHz
- 手动输入72MHz自动匹配
5.配置工程属性
- 填写工程名字
- 选择工程路径
- 选择工程平台(KEIL MDK)

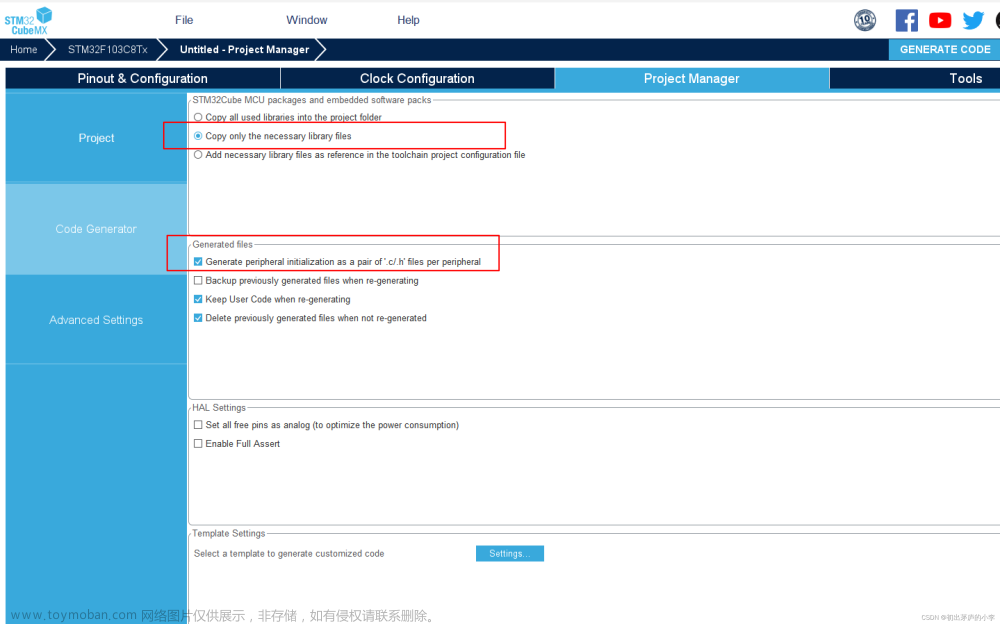
6.配置工程代码属性
- 拷贝必要的库文件
- 单独形成.c跟.h文件
7.生产工程并添加修改代码
- 直接打开工程
- 修改必要代码
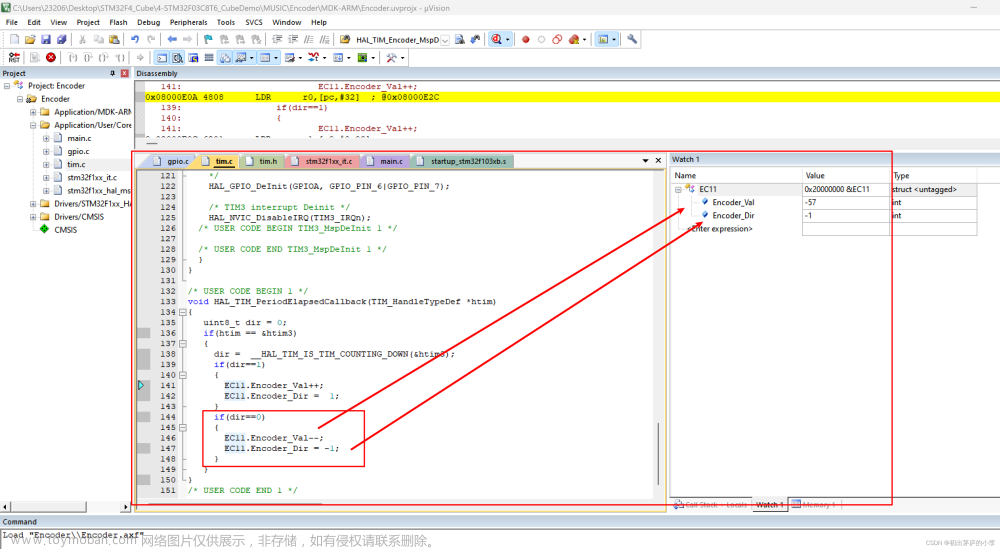
7.1修改定时器代码
- 添加一个自定义结构体
/* USER CODE BEGIN Private defines */
typedef struct
{
int Encoder_Val;
int Encoder_Dir;
}EC11_t;
extern EC11_t EC11;
/* USER CODE END Private defines */
编写一个中断回调函数
编写回调函数逻辑代码
/* USER CODE BEGIN 0 */
EC11_t EC11;
/* USER CODE END 0 */
/* USER CODE BEGIN 1 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
uint8_t dir = 0;
if(htim == &htim3)
{
dir = __HAL_TIM_IS_TIM_COUNTING_DOWN(&htim3);
if(dir==1)
{
EC11.Encoder_Val++;
EC11.Encoder_Dir = 1;
}
if(dir==0)
{
EC11.Encoder_Val--;
EC11.Encoder_Dir = -1;
}
}
}
/* USER CODE END 1 */
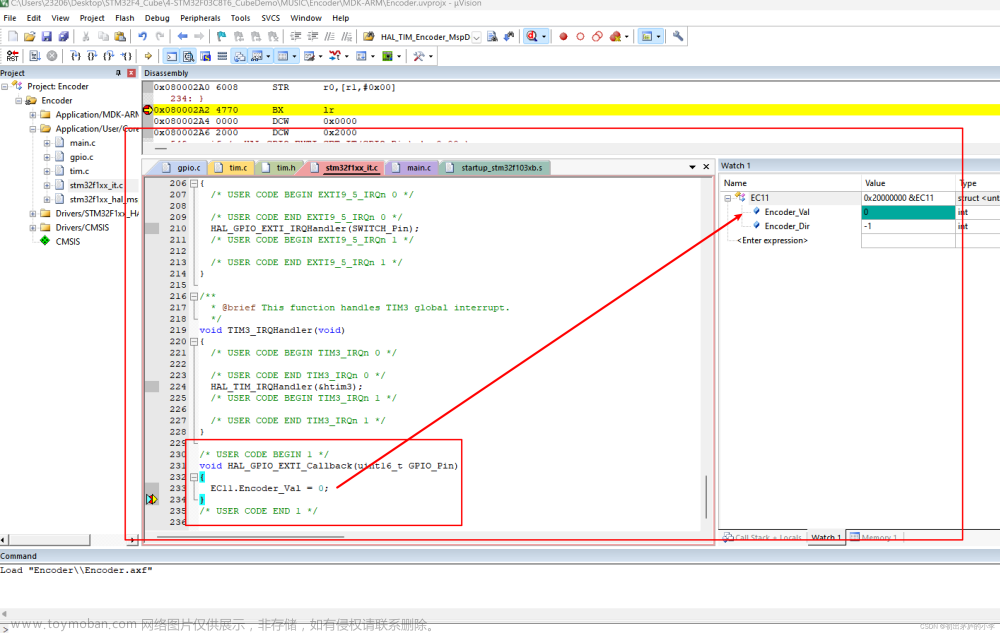
7.2修改外部中断代码
添加一个中断回调函数
/* USER CODE BEGIN 1 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
EC11.Encoder_Val = 0;
}
/* USER CODE END 1 */
7.3修改初始化代码
/* USER CODE BEGIN TIM3_Init 2 */
__HAL_TIM_CLEAR_IT(&htim3,TIM_IT_UPDATE);
HAL_TIM_Encoder_Start(&htim3, TIM_CHANNEL_ALL);
__HAL_TIM_ENABLE_IT(&htim3,TIM_IT_UPDATE);
/* USER CODE END TIM3_Init 2 */
8.下载调试代码
- 现象1顺时针旋转编码器值加1

- 现象2顺时针旋转编码器值减1
- 按键按下编码器值清零
 文章来源:https://www.toymoban.com/news/detail-658506.html
文章来源:https://www.toymoban.com/news/detail-658506.html
9.总结
至此编码器已经全部写完了。STM32CubeMx的使用比较方便,注意一点就是如果修改代码尽量写到英文的注释中去,这样即使再重新修改CubeMx配置重新生成代码也不会改变原来的程序,否则原来的代码就没了,别问我咋知道的血泪的教训啊!!!文章来源地址https://www.toymoban.com/news/detail-658506.html
到了这里,关于初出茅庐的小李博客之STM32CubeMx配置定时器的编码器模式的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!