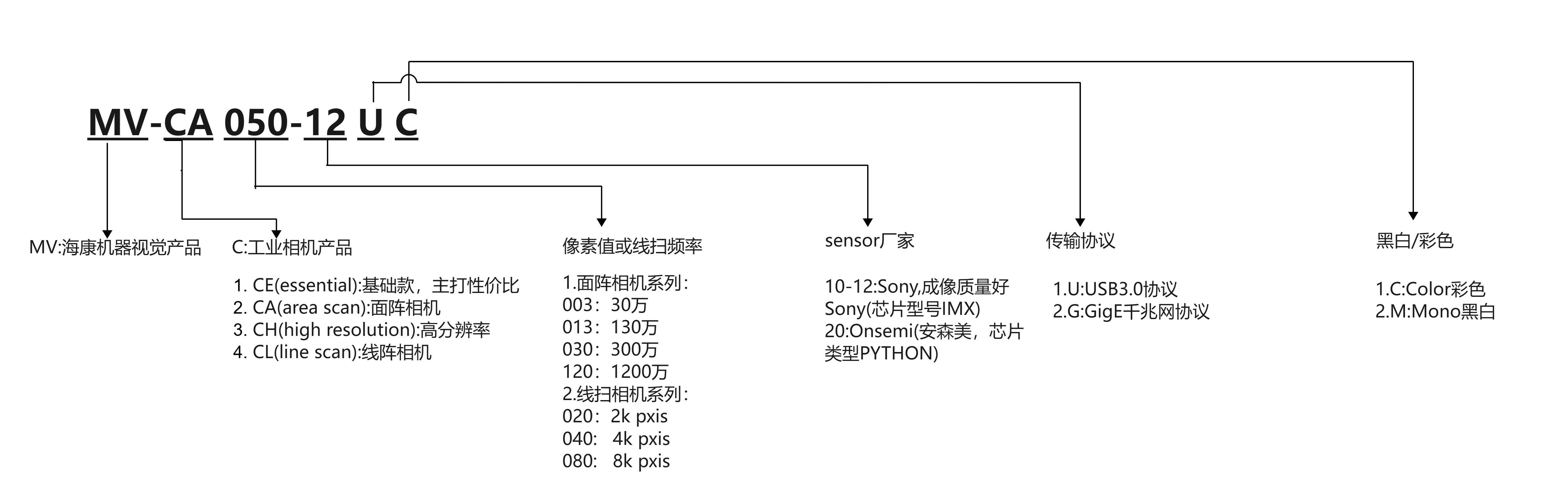
Ubuntu 连接海康智能相机步骤(亲测,已成功读码)
(就是按照海康的提供的步骤和源码连接相机,流水账)
- 安装Ubuntu20.04
- 安装gcc和g++,IDmvs只提供了C代码,所以需要自己make编译,自己去搜下怎么安装。
- 官网下载IDMVS软件,进入海康机器人页面,进入下载选项,,选择客户端下载,第二页,选择里面的IDMVS(linux)
- 解压安装,我是用deb文件安装的,选择X86_64版本。
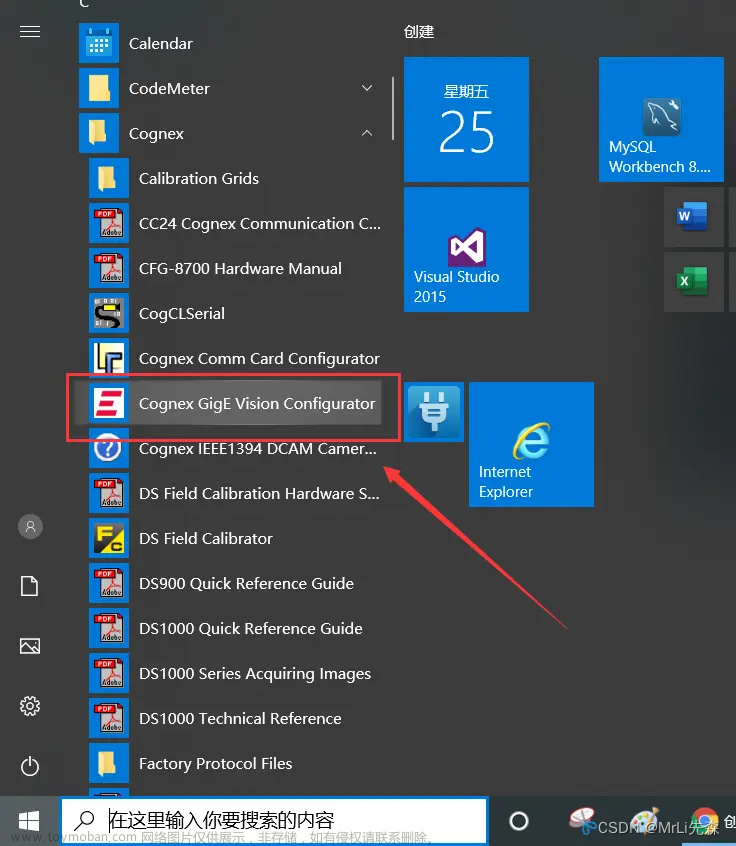
- 安装完成后,在菜单栏里面有IDMVS图标,可以直接打开,或者进入/opt/IDMVS/bin/,运行./IDMVS.sh,两种方法都能打开客户端。
- 连接相机,如果没有找到相机你可以在windows上先连下相机试试,然后设定固定IP,连接相机
- 连上之后,进入/opt/IDMVS/有个demo的文件夹,具体在哪里忘记了,可以找一下,
- IDMVS只提供了两个demo,进入/GrabImage/目录下,应该只有两个文件,一个GrabImage.c,一个makefile。

- 然后把上级目录下的/sdk/里面的.so文件放到/GrabImage/目录下。
- 然后sudo make(如果你之前装好了g++和gcc,应该可以make成功)
- 执行生成后的文件。./GrabImage,就OK了,选择你想要连接的相机。就能看到获取到的结果了。
以下是GrabImage.c的代码文章来源:https://www.toymoban.com/news/detail-658761.html
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <pthread.h>
#include <cstdlib>
#include <string>
#include <iconv.h>
#include "MvCodeReaderParams.h"
#include "MvCodeReaderErrorDefine.h"
#include "MvCodeReaderCtrl.h"
bool g_bExit = false;
// ch:中文转换条码长度定义 | en:Chinese coding format len
#define MAX_BCR_LEN 512
// ch:中文编码GB2312格式转换UTF_8 | en: Chinese coding format GB2312 to utf_8
int GB2312ToUTF8(char* szSrc, size_t iSrcLen, char* szDst, size_t iDstLen)
{
iconv_t cd = iconv_open("utf-8//IGNORE", "gb2312//IGNORE");
if(0 == cd)
{
return -2;
}
memset(szDst, 0, iDstLen);
char **src = &szSrc;
char **dst = &szDst;
if(-1 == (int)iconv(cd, src, &iSrcLen, dst, &iDstLen))
{
return -1;
}
iconv_close(cd);
return 0;
}
// ch:等待用户输入enter键来结束取流或结束程序
// en:wait for user to input enter to stop grabbing or end the sample program
void PressEnterToExit(void)
{
int c;
while ( (c = getchar()) != '\n' && c != EOF );
fprintf( stderr, "\nPress Enter to exit.\n");
while( getchar() != '\n');
g_bExit = true;
usleep(1);
}
// ch:打印设备信息 | en:Print device Info
bool PrintDeviceInfo(MV_CODEREADER_DEVICE_INFO* pstMVDevInfo)
{
if (NULL == pstMVDevInfo)
{
printf("The Pointer of pstMVDevInfo is NULL!\r\n");
return false;
}
if (MV_CODEREADER_GIGE_DEVICE == pstMVDevInfo->nTLayerType)
{
int nIp1 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0xff000000) >> 24);
int nIp2 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x00ff0000) >> 16);
int nIp3 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x0000ff00) >> 8);
int nIp4 = (pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x000000ff);
// ch:打印当前相机ip和用户自定义名字 | en:print current ip and user defined name
printf("CurrentIp: %d.%d.%d.%d\r\n" , nIp1, nIp2, nIp3, nIp4);
printf("UserDefinedName: %s\r\n\n" , pstMVDevInfo->SpecialInfo.stGigEInfo.chUserDefinedName);
}
else if (MV_CODEREADER_USB_DEVICE == pstMVDevInfo->nTLayerType)
{
printf("UserDefinedName: %s\r\n\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.chUserDefinedName);
}
else
{
printf("Not support.\r\n");
}
return true;
}
// ch:获取图像线程 | en:Get Image Thread
static void* GrabImageThread(void* pUser)
{
int nRet = MV_CODEREADER_OK;
MV_CODEREADER_IMAGE_OUT_INFO_EX2 stImageInfo = {0};
memset(&stImageInfo, 0, sizeof(MV_CODEREADER_IMAGE_OUT_INFO_EX2));
unsigned char * pData = NULL;
while(1)
{
if (g_bExit)
{
break;
}
nRet = MV_CODEREADER_GetOneFrameTimeoutEx2(pUser, &pData, &stImageInfo, 1000);
if (nRet == MV_CODEREADER_OK)
{
MV_CODEREADER_RESULT_BCR_EX* stBcrResult = (MV_CODEREADER_RESULT_BCR_EX*)stImageInfo.pstCodeListEx;
printf("Get One Frame: nChannelID[%d] Width[%d], Height[%d], nFrameNum[%d], nTriggerIndex[%d]\n",
stImageInfo.nChannelID, stImageInfo.nWidth, stImageInfo.nHeight, stImageInfo.nFrameNum, stImageInfo.nTriggerIndex);
printf("CodeNum[%d]\n", stBcrResult->nCodeNum);
char strChar[MAX_BCR_LEN] = {0};
for (int i = 0; i < stBcrResult->nCodeNum; i++)
{
memset(strChar, 0, MAX_BCR_LEN);
nRet = GB2312ToUTF8(stBcrResult->stBcrInfoEx[i].chCode, strlen(stBcrResult->stBcrInfoEx[i].chCode), strChar, MAX_BCR_LEN);
if (nRet == MV_CODEREADER_OK)
{
printf("CodeNum[%d] Code[%s]\r\n", i, strChar);
}
else
{
printf("CodeNum[%d] Code[%s]\r\n", i, stBcrResult->stBcrInfoEx[i].chCode);
}
}
}
else
{
printf("No data[0x%x]\r\n", nRet);
}
}
return 0;
}
// ch:主处理函数 | en:main process
int main()
{
int nRet = MV_CODEREADER_OK;
void* handle = NULL;
bool bIsNormalRun = true;
do
{
MV_CODEREADER_DEVICE_INFO_LIST stDeviceList;
memset(&stDeviceList, 0, sizeof(MV_CODEREADER_DEVICE_INFO_LIST));
// ch:枚举设备 | Enum device
nRet = MV_CODEREADER_EnumDevices(&stDeviceList, MV_CODEREADER_GIGE_DEVICE);
if (MV_CODEREADER_OK != nRet)
{
printf("Enum Devices fail! nRet [%#x]\r\n", nRet);
break;
}
else
{
printf("Enum Devices succeed!\r\n");
}
if (stDeviceList.nDeviceNum > 0)
{
for (unsigned int i = 0; i < stDeviceList.nDeviceNum; i++)
{
printf("[device %d]:\r\n", i);
MV_CODEREADER_DEVICE_INFO* pDeviceInfo = stDeviceList.pDeviceInfo[i];
if (NULL == pDeviceInfo)
{
break;
}
PrintDeviceInfo(pDeviceInfo);
}
}
else
{
printf("Find No Devices!\r\n");
break;
}
printf("Please Intput camera index:");
unsigned int nIndex = 0;
scanf("%d", &nIndex);
if (nIndex >= stDeviceList.nDeviceNum)
{
printf("Intput error!\r\n");
break;
}
// ch:选择设备并创建句柄 | Select device and create handle
nRet = MV_CODEREADER_CreateHandle(&handle, stDeviceList.pDeviceInfo[nIndex]);
if (MV_CODEREADER_OK != nRet)
{
printf("Create Handle fail! nRet [%#x]\r\n", nRet);
break;
}
else
{
printf("Create Handle succeed!\r\n");
}
// ch:打开设备 | Open device
nRet = MV_CODEREADER_OpenDevice(handle);
if (MV_CODEREADER_OK != nRet)
{
printf("Open Device fail! nRet [%#x]\r\n", nRet);
break;
}
else
{
printf("Open Device succeed!\r\n");
}
// ch:设置触发模式为off | eb:Set trigger mode as off
nRet = MV_CODEREADER_SetEnumValue(handle, "TriggerMode", MV_CODEREADER_TRIGGER_MODE_OFF);
if (MV_CODEREADER_OK != nRet)
{
printf("Set Trigger Mode fail! nRet [%#x]\r\n", nRet);
break;
}
else
{
printf("Set Trigger Mode succeed!\r\n");
}
// ch:开始取流 | en:Start grab image
nRet = MV_CODEREADER_StartGrabbing(handle);
if (MV_CODEREADER_OK != nRet)
{
printf("Start Grabbing fail! nRet [%#x]\r\n", nRet);
break;
}
else
{
printf("Start Grabbing succeed!\r\n");
}
pthread_t nThreadID;
nRet = pthread_create(&nThreadID, NULL, GrabImageThread, handle);
if (MV_CODEREADER_OK != nRet)
{
printf("Thread create failed! nRet [%d]\r\n", nRet);
break;
}
PressEnterToExit();
nRet = pthread_join(nThreadID, NULL);
if (MV_CODEREADER_OK != nRet)
{
printf("Thread free failed! nRet = [%d]\r\n", nRet);
bIsNormalRun = false;
break;
}
// ch:停止取流 | en:Stop grab image
nRet = MV_CODEREADER_StopGrabbing(handle);
if (MV_CODEREADER_OK != nRet)
{
printf("Stop Grabbing fail! nRet [%#x]\r\n", nRet);
bIsNormalRun = false;
break;
}
else
{
printf("Stop Grabbing succeed!\r\n");
}
// ch:关闭设备 | en:close device
nRet = MV_CODEREADER_CloseDevice(handle);
if (MV_CODEREADER_OK != nRet)
{
printf("MV_CODEREADER_CloseDevice fail! nRet [%#x]\r\n", nRet);
bIsNormalRun = false;
break;
}
else
{
printf("MV_CODEREADER_CloseDevice succeed!\r\n");
}
// ch:销毁句柄 | en:Destroy handle
nRet = MV_CODEREADER_DestroyHandle(handle);
if (MV_CODEREADER_OK != nRet)
{
printf("MV_CODEREADER_DestroyHandle fail! nRet [%#x]\r\n", nRet);
bIsNormalRun = false;
break;
}
else
{
handle = NULL;
printf("MV_CODEREADER_DestroyHandle succeed!\r\n");
}
} while (0);
if (handle != NULL)
{
// ch:关闭设备 | en:Close device
// ch:销毁句柄 | en:Destroy handle
MV_CODEREADER_CloseDevice(handle);
MV_CODEREADER_DestroyHandle(handle);
handle = NULL;
}
if (bIsNormalRun)
{
printf("Exit!\r\n");
}
if (false == bIsNormalRun)
{
PressEnterToExit();
printf("Exit!\r\n");
}
return 0;
}
输出的结果
 文章来源地址https://www.toymoban.com/news/detail-658761.html
文章来源地址https://www.toymoban.com/news/detail-658761.html
到了这里,关于Ubuntu 连接海康智能相机步骤(亲测,成功读码)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!