目录
陀螺仪传感器
1、基础知识
2、实战使用
陀螺仪传感器
1、基础知识
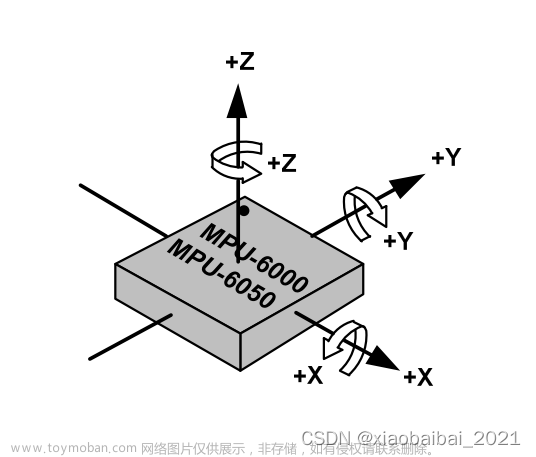
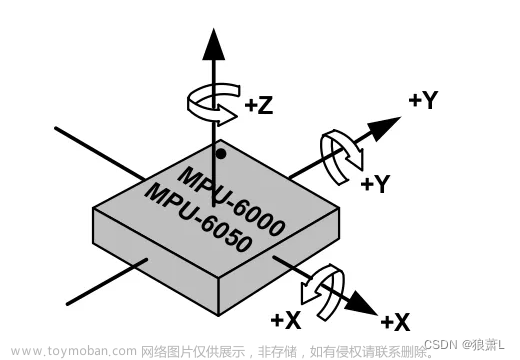
返回x、y、z轴的角加速度数据。
水平逆时针旋转,z轴为正,顺时针为负;
向左旋转,y轴为负,向右旋转,y为正;
向上旋转,x为负,向下旋转,x为正。

2、实战使用
修改activity_main.xml代码如下:文章来源:https://www.toymoban.com/news/detail-662458.html
<?xml version="1.0" encoding="utf-8"?>
<LinearLayout xmlns:android="http://schemas.android.com/apk/res/android"
android:orientation="vertical"
android:layout_width="match_parent"
android:layout_height="match_parent">
<TextView
android:id="@+id/textViewx"
android:layout_width="wrap_content"
android:layout_height="wrap_content" />
<TextView
android:id="@+id/textViewy"
android:layout_width="wrap_content"
android:layout_height="wrap_content" />
<TextView
android:id="@+id/textViewz"
android:layout_width="wrap_content"
android:layout_height="wrap_content" />
</LinearLayout>修改MainActivity代码如下:文章来源地址https://www.toymoban.com/news/detail-662458.html
public class MainActivity extends AppCompatActivity implements SensorEventListener {
private SensorManager sm;
TextView textViewx;
TextView textViewy;
TextView textViewz;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
textViewx = (TextView) findViewById(R.id.textViewx);
textViewy = (TextView) findViewById(R.id.textViewy);
textViewz = (TextView) findViewById(R.id.textViewz);
// 获取传感器管理器
sm = (SensorManager)getSystemService(SENSOR_SERVICE);
// 调用方法获得需要的传感器
Sensor mSensorOrientation = sm.getDefaultSensor(Sensor.TYPE_GYROSCOPE);
// 注册监听器
// SENSOR_DELAY_FASTEST最灵敏
// SENSOR_DELAY_GAME 游戏的时候,不过一般用这个就够了
// SENSOR_DELAY_NORMAL 比较慢。
// SENSOR_DELAY_UI 最慢的
sm.registerListener(this, mSensorOrientation, android.hardware.SensorManager.SENSOR_DELAY_UI);
}
// 该方法在传感器的值发生改变的时候调用
@Override
public void onSensorChanged(SensorEvent event) {
float X = (float)Math.toDegrees(event.values[0]);
float Y = (float)Math.toDegrees(event.values[1]);
float Z = (float)Math.toDegrees(event.values[2]);
textViewx.setText("绕x轴转过的角速度\n"+ X );
textViewy.setText("绕y轴转过的角速度\n"+ Y );
textViewz.setText("绕z轴转过的角速度\n"+ Z );
}
// 当传感器的进度发生改变时会回调
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
}
// 在activity变为不可见的时候,传感器依然在工作,这样很耗电,所以我们根据需求可以在onPause方法里面停掉传感器的工作
@Override
public void onPause() {
sm.unregisterListener(this);
super.onPause();
}
}到了这里,关于【Android入门到项目实战-- 9.5】—— 陀螺仪传感器的详细使用教程的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!