欢迎仪式
carla与ros2的自动驾驶算法-planning与control算法开发与仿真
欢迎大家来到自动驾驶Player(L5Player)的自动驾驶算法与仿真空间,在这个空间我们将一起完成这些事情:
- 控制算法构建基础模块并仿真调试:PID、LQR、Stanley 、MPC、滑膜控制、模糊控制、横向控制、纵向控制
- 运动规划算法构建基础模块并仿真调试:样条曲线、贝塞尔曲线、ASTAR、RRT、动态规划、二次规划、EM Planer、Lattice Planer
- 基于以上基础模块构建L2~L4功能模块: AEB、ACC、LKA、TJA、ALC、高速NOP、城市NOP、AVP
- 文章、算法、理论、书籍分享;
- 日常交流,行业咨询分享;
建立这个项目的目的,是希望从零开始,搭建完整的自动驾驶系统,并且与大家共同完成
github地址: https://github.com/L5Player/AutoDriving-Planning-Control-Algorithm-Simulation-Carla
gitte地址:AutoDriving-Planning-Control-Algorithm-Simulation-Carla: AutoDriving-Planning-Control-Algorithm-Simulation-Carla文章来源:https://www.toymoban.com/news/detail-662607.html
首先启动Crla仿真器
- 在Carla下运行:./CarlaUE4.sh 或 ./CarlaUE4.sh -prefernvidia

文章来源地址https://www.toymoban.com/news/detail-662607.html
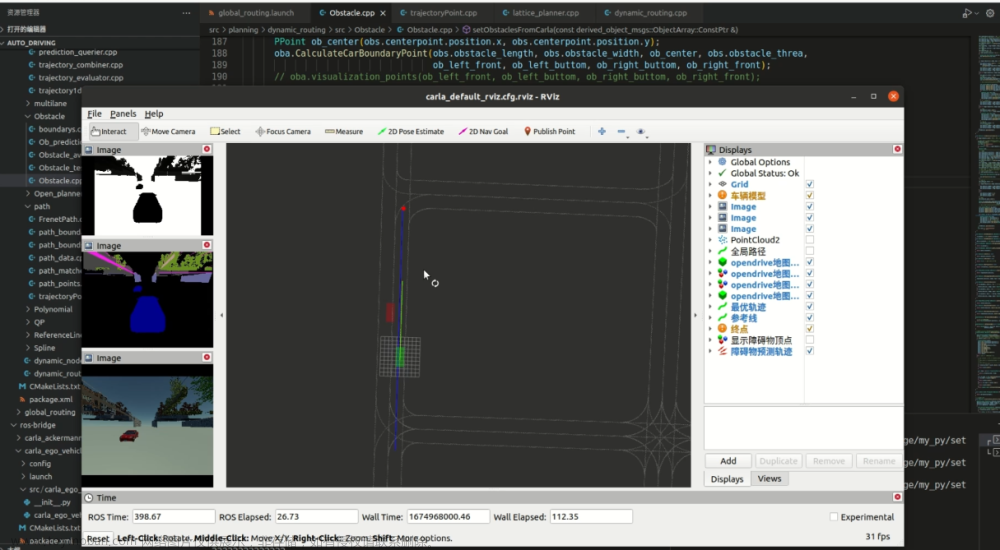
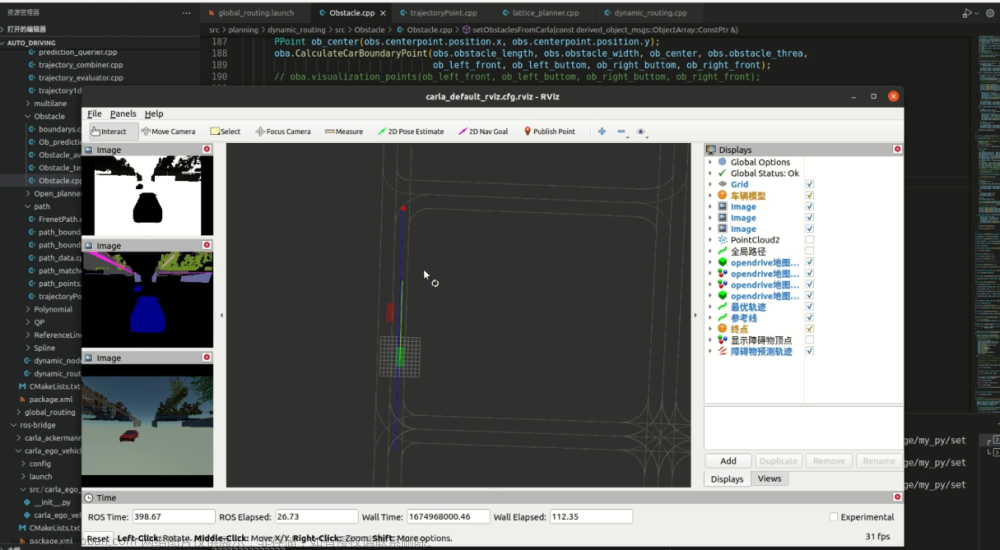
NEW PID 模块启动流程
- 在PID Controler基础上更换导航路径,增加launch启动脚本以及rviz显示全局路径以及历史轨迹
- source source_env.sh
- ros2 launch carla_l5player_bridge_ego_vis carla_bridge_ego_vehilce.launch.py
- ros2 run carla_l5player_pid_new_controller carla_l5player_pid_new_controller_node
- 启动节点以及rviz: ros2 launch carla_l5player_pid_new_controller new_pid_launch.py
PID 模块启动流程
- source source_env.sh
- ros2 launch carla_l5player_bridge_ego_vis carla_bridge_ego_vehilce.launch.py
- ros2 run carla_l5player_pid_controller carla_l5player_pid_controller_node
Stanley 模块启动流程
- source source_env.sh
- ros2 launch carla_l5player_bridge_ego_vis carla_bridge_ego_vehilce.launch.py
- ros2 run carla_l5player_stanley_pid_controller carla_l5player_stanley_pid_controller_node
LQR 模块启动流程
- source source_env.sh
- ros2 launch carla_l5player_bridge_ego_vis carla_bridge_ego_vehilce.launch.py
- ros2 launch carla_l5player_lqr_pid_controller lqr_launch.py
MPC 模块启动流程
- source source_env.sh
- ros2 launch carla_l5player_bridge_ego_vis carla_bridge_ego_vehilce.launch.py
- ros2 launch carla_l5player_mpc_controller mpc_launch.py
到了这里,关于carla与ros2的自动驾驶算法-planning与control算法开发与仿真的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!