需要的资料:
python_pcl-0.3.1-cp36-cp36m-win_amd64.whl
压缩包:pcl-1.12.1-pdb-msvc2019-win64
pcl程序:PCL-1.12.1-AllInOne-msvc2019-win64
网盘链接:https://pan.baidu.com/s/184yY7fc5rqwwd9F4cMncDw
提取码:qaqa
用来检验安装是否成功的PCD文件:rabbit.pcd
文件先进行提取,提取完毕之后开始安装:
第一步:双击应用程序进行安装
点击下一步
点击我接受
点击add pcl to the system path for all users,这样在后期环境变量配置的时候有用们可以减少自己配置的过程。
随机定义自己的安装目录,不过需要注意两点,如果后续有和cmake,qt或者是vtk联合配置,那么安装目录最好是放在c盘里面,不然qt和cmake的程序运行只寻找c目录下文件,找不到pcl会报错。还有就是命名的空格PCL 1.12.1中间如果只是python使用无所谓,但是如果是qt一样不允许有空格要注意,最好的就是安装c盘,消除pcl与1.12.1的空格。
继续下一步:
进行安装
安装成功:
安装程序结束后,PCL安装目录结构如下图所示,其中第三方库3rdParty文件夹下包含Boost、Eigen、FLANN、OpenNI2、Qhull和VTK六个文件夹,各个文件夹目录结构见下图。
找到安装目录下面的C:\Program Files\PCL 1.12.1\3rdParty\OpenNI2,双击安装,一开始只有一个,安装完成就会有其余的文件夹出现。

情况1:如果你之前安装过,点击remove,再重新运行OpenNI-Windows-x64-2.2.msi文件,进行安装。
况2:如果你之前没安装过,直接安装即可。
特别注意 :安装的路径设在C:\Program Files\PCL 1.12.1\3rdParty\OpenNI2中。(与OpenNI-Windows-x64-2.2.msi文件在同一目录中)
到这里pcl进行环境配置
由于刚开始添加了部分环境变量配置这里只需要


点击path进行编辑

如果是python使用只需要以下的几个,其余的可能需要更多的环境配置。
环境配置完毕
解压pcl-1.12.1-pdb-msvc2019-win64.zip,将解压的后的所有文件,复制到C:\Program Files\PCL 1.12.1\bin里面。到此pcl安装完成。
接下来是python的配置使用。
win+r打开输入cmd进入管理界面,列出系统存在的几个虚拟环境。
conda info --envs
选择进入其中一个虚拟环境,使用activate xxx(虚拟环境名称)
查询python的版本,这里是python3.9.13,网盘压缩包里面带的
python_pcl-0.3.1-cp36-cp36m-win_amd64.whl。
以及下载python_pcl-0.3-cp36-cp36m-win_amd64.whl。这两个wheel的文件是针对python3.6使用的版本,如果需要3.9可能需要自行寻找对应的wheel,
寻找到3.6的版本使用cd命令进入该whl所在文件夹,使用
pip install python_pcl-0.3.1-cp36-cp36m-win_amd64.whl
如果顺利则安装成功,显示成功安装
如果报错那就是安装错误,这里给出两种报错问题解决方法:
错误一:

出现ValueError: check_hostname requires server_hostname
这个错误通常是由于 SSL/TLS 证书的问题引起的。可能是由于某些网络配置或代理服务器的原因,无法正常进行 SSL/TLS 握手,导致无法建立安全的连接。解决此问题的方法可能包括:
检查网络连接和代理设置,确保没有任何限制或阻止 SSL/TLS 连接的配置。
确保操作系统和 Python 环境的 SSL/TLS 相关组件是最新的,可以尝试更新操作系统和 Python 版本。
如果使用了代理服务器,请尝试禁用或更改代理设置,并重新运行安装命令。
如果使用的是防火墙或安全软件,请检查其设置,确保它们不会干扰 SSL/TLS 连接。
最好的办法就是重启,重新来进行配置,
如果是安装一半报错

这就是由于网络连接缓慢或不稳定引起的,检查网络,或者开关重启。
然后就是打开pycharm输入以下代码
import pcl
import numpy as np
import pcl.pcl_visualization
if name == “main”:
points = pcl.load_XYZRGB(‘rabbit.pcd’)
viewer = pcl.pcl_visualization.CloudViewing()
viewer.ShowColorCloud(points, b'cloud')
v = True
while v:
v = not (viewer.WasStopped())
同时将rabbit.pcd文件放在该段代码的相同目录下就可以运行了,如果最后:报错ImportError: DLL load failed: 找不到指定的模块。
Traceback (most recent call last):
File “”, line 1, in
File “D:\Anaconda3\envs\python36\lib\site-packages\pcl_init_.py”, line 5, in
from ._pcl import *
ImportError: DLL load failed: 找不到指定的模块。
pcl是要依赖于OpenNI2.dll的,在D:\OpenNI2\Samples\Bin这个位置里面找到OpenNI2.dll文章来源:https://www.toymoban.com/news/detail-663733.html
复制到D:\Anaconda3\envs\python36\Lib\site-packages\pcl这个里面,再试一次就可以用了
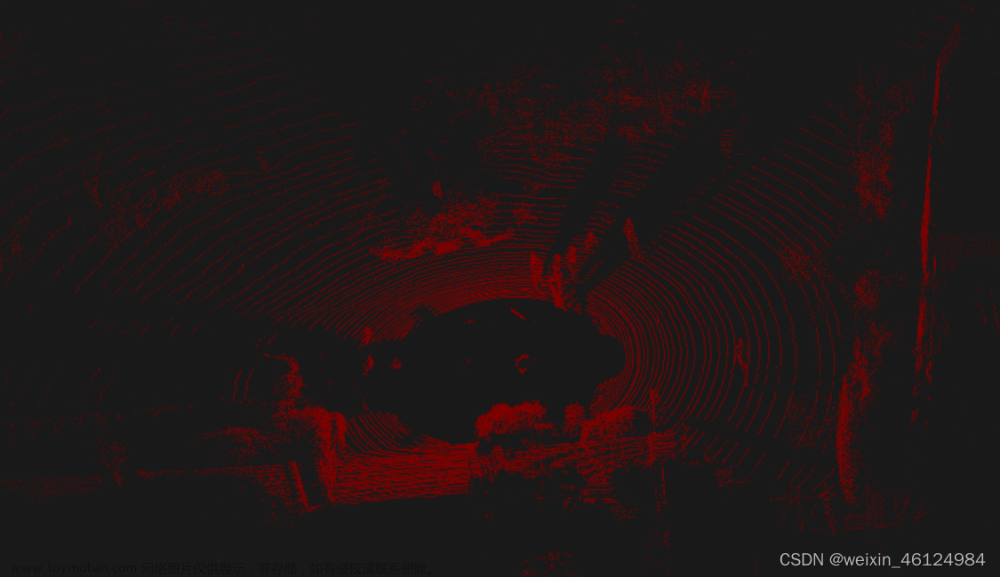
最终结果:通过滚轮缩放文件

一直缩小就会出下兔子,证明配置成功没有问题。 文章来源地址https://www.toymoban.com/news/detail-663733.html
文章来源地址https://www.toymoban.com/news/detail-663733.html
到了这里,关于【python中对点云PCL库的下载安装与配置】的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!