线性代数
线性代数(如矩阵乘法、矩阵分解、行列式以及其他方阵数学等)是任何数组库的重要组成部分,NumPy中实现了线性代数中常用的各种操作,并形成了numpy.linalg线性代数相关的模块。本节主要介绍如下函数:
-
diag:以一维数组的形式返回方阵的对角线(或非对角线)元素,或将一维数组转换为方阵(非对角线元素为0)。 -
dot:矩阵乘法。 -
trace:计算对角线元素的和。 -
det:计算矩阵行列式。 -
eig:计算方阵的特征值和特征向量。 -
inv:计算方阵的逆。
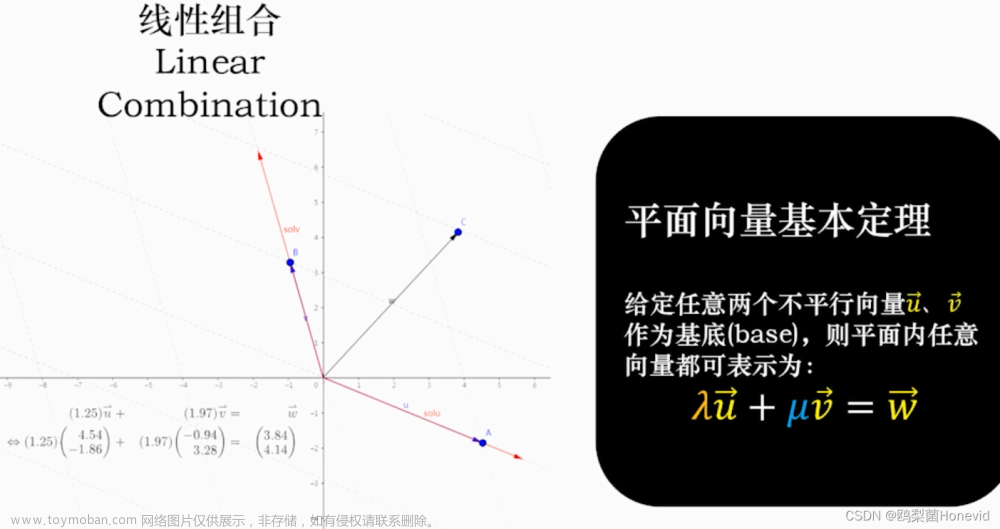
向量与矩阵:
矩阵:有多行多列元素组成的一个集合,一个m*n的矩阵,有m行n列个元素
向量:如果一个矩阵只有一列,那么就是一个列向量;如果只有一行,那么就是一个行向量
从某个角度来说,矩阵就是由多个向量组成的
矩阵相乘:
A矩阵:m行,x列
B矩阵:n行,y列
前提:x=n
C矩阵:AB乘积
- 乘积C的第m行、n列 = 矩阵A的第m行的元素与矩阵B第n列元素的乘积之和
# 矩阵相乘
a = np.arange(12)
b = a.reshape([3, 4])
c = a.reshape([4, 3])
# 矩阵b的第二维大小,必须等于矩阵c的第一维大小
d = b.dot(c) # 等价于 np.dot(b, c)
print('a: \n{}'.format(a))
print('b: \n{}'.format(b))
print('c: \n{}'.format(c))
print('d: \n{}'.format(d))
a:
[ 0 1 2 3 4 5 6 7 8 9 10 11]
b:
[[ 0 1 2 3]
[ 4 5 6 7]
[ 8 9 10 11]]
c:
[[ 0 1 2]
[ 3 4 5]
[ 6 7 8]
[ 9 10 11]]
d:
[[ 42 48 54]
[114 136 158]
[186 224 262]]
# numpy.linalg 中有一组标准的矩阵分解运算以及诸如求逆和行列式之类的东西
# np.linalg.diag 以一维数组的形式返回方阵的对角线(或非对角线)元素,
# 或将一维数组转换为方阵(非对角线元素为0)
e = np.diag(d)
f = np.diag(e)
print('d: \n{}'.format(d))
print('e: \n{}'.format(e))
print('f: \n{}'.format(f))
d:
[[ 42 48 54]
[114 136 158]
[186 224 262]]
e:
[ 42 136 262]
f:
[[ 42 0 0]
[ 0 136 0]
[ 0 0 262]]
# trace, 计算对角线元素的和
g = np.trace(d)
g
440
# det,计算行列式
h = np.linalg.det(d)
h
1.3642420526593978e-11
# eig,计算特征值和特征向量
i = np.linalg.eig(d)
i
(array([4.36702561e+02, 3.29743887e+00, 3.13152204e-14]), array([[ 0.17716392, 0.77712552, 0.40824829], [ 0.5095763 , 0.07620532, -0.81649658], [ 0.84198868, -0.62471488, 0.40824829]]))
# inv,计算方阵的逆
tmp = np.random.rand(3, 3)
j = np.linalg.inv(tmp)
j
array([[-0.59449952, 1.39735912, -0.06654123], [ 1.56034184, -0.40734618, -0.48055062], [ 0.10659811, -0.62164179, 1.30437759]])
补充:矩阵的逆
矩阵的逆是指对于一个n维的矩阵A,存在一个n维的矩阵B,使得A乘以B等于单位矩阵E,即AB=BA=E。其逆矩阵求解方法,有以下几种:
伴随矩阵法: 伴随矩阵法是求解矩阵逆的一种方法。对于一个n维矩阵A,其逆矩阵可以用下式表示:A^(-1)=1/|A| * Adj(A),其中|A|表示A的行列式,Adj(A)表示A的伴随矩阵。伴随矩阵的求法是:先求出矩阵A的代数余子式,然后将其转置得到的矩阵即为伴随矩阵。
初等变换法: 初等变换法是求解矩阵逆的另一种方法。将待求逆的矩阵A和单位矩阵E按行合并成一个矩阵[A|E],然后对其进行初等变换,直到左边的矩阵变为单位矩阵,右边的矩阵即为所求的逆矩阵。
高斯-约旦消元法: 高斯-约旦消元法也是求解矩阵逆的一种方法。将待求逆的矩阵A和单位矩阵E按列合并成一个矩阵[A|E],然后对其进行高斯-约旦消元,直到左边的矩阵变为单位矩阵,右边的矩阵即为所求的逆矩阵。文章来源:https://www.toymoban.com/news/detail-663998.html
分块矩阵法: 分块矩阵法适用于分块矩阵的求逆,即将一个大的矩阵分成多个小的矩阵。其方法是将大矩阵A分成四个小矩阵A11、A12、A21、A22,并根据矩阵分块公式求出逆矩阵。文章来源地址https://www.toymoban.com/news/detail-663998.html
代码合集
import numpy as np
def func1():
a = np.arange(12)
b = a.reshape([3, 4])
c = a.reshape([4, 3])
# 矩阵b的第二维大小,必须等于矩阵c的第一维大小
d = b.dot(c) # 等价于 np.dot(b, c)
# np.dot(b, c)
print('a: \n{}'.format(a))
print('b: \n{}'.format(b))
print('c: \n{}'.format(c))
print('d: \n{}'.format(d))
# numpy.linalg 中有一组标准的矩阵分解运算以及诸如求逆和行列式之类的东西
# np.linalg.diag 以一维数组的形式返回方阵的对角线(或非对角线)元素,
# 或将一维数组转换为方阵(非对角线元素为0)
print("=========linalg test=========")
e = np.diag(d)
f = np.diag(e)
print('d: \n{}'.format(d))
print('e: \n{}'.format(e))
print('f: \n{}'.format(f))
# 计算对角线元素之和
g = np.trace(d)
print(g)
# det,计算行列式
h = np.linalg.det(d)
print(h)
# eig,计算特征值和特征向量
i = np.linalg.eig(d)
print(i)
def func2():
# 计算方阵的逆
# https://blog.51cto.com/u_15072903/3963066
tmp = np.random.rand(3, 3)
print(tmp)
j = np.linalg.inv(tmp)
print(j)
print(tmp.dot(j))
print(j.dot(tmp))
if __name__ == "__main__":
# func1()
func2()
到了这里,关于Numpy入门(3)—线性代数的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!