今日学习一下红外遥控的解码使用,红外遥控在日常生活必不可少,它的解码与使用也是学习单片机的一个小过程,我们将通过实践来实现它。
文章提供源码、测试工程下载、测试效果图。
目录
红外遥控原理:
红外遥控特点:
红外发射装置:
红外接收示意图:
NEC协议:
程序设计:
程序实践目标:
位带操作:
定时器4初始化:
定时器4中断服务程序:
处理红外键盘:
主函数:
测试效果:
工程下载:
红外遥控原理:
下图就是红外遥控与1858红外接收头

红外遥控特点:
优点:抗干扰能力强、信息可靠、功耗低、成本低、容易实现通信
缺点:距离只有几米
红外发射装置:
红外发射装置就比如遥控器,它是由键盘电路、红外编码电路、电源电路、红外发射电路组成的,红外发射电路在遥控器里是最特殊的,但它本质也是一个特殊的红外发光二极管,它在被激发时发出的是红外线,而不是普通二极管那样的可见光~
发射管红外波长:940Nm 载波频率:38KHZ
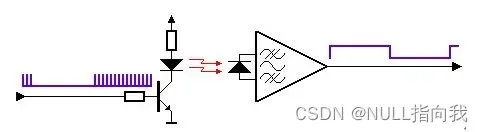
红外接收示意图:
由图可知,发射端在左侧控制二极管发射红外线,右侧接收端转化为0和1的信号
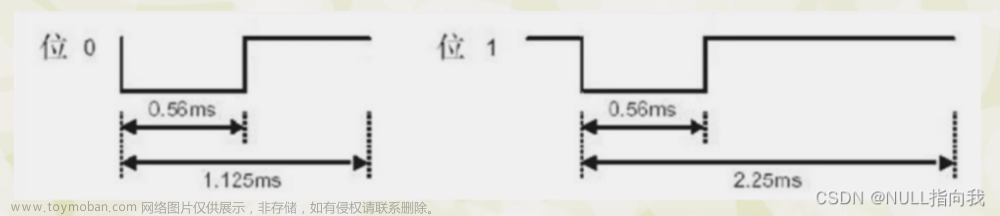
NEC协议:
配套的红外遥控器使用的是EC协议,EC码的位定义:
一个脉冲对应560us的连续载波,
一个逻辑1传输需要2.25ms(560us脉冲+1680us低电平),
一个逻辑0的传输需要 1.125ms(560us脉冲+560us低电平)。

反码就是源码基础上取反的意思
程序设计上应该先判断是否有引导码,有了引导码,之后就开始接收对应地址码,控制码以及他们的反码等。
程序设计:
红外接收方面,主要是获取高低电平的信号,而有关NEC逻辑,0协议的转换,接收头已经做好了,会从信号端直接传来1,0的电平信号,因此我们只需捕捉这样的电平信号,将其转换为具体的值即可~
这里提供俩种思路:1.外部中断法 2.定时器捕获法 都可以使用
程序实践目标:
使用定时器4 通道4 捕获红外接收模块接受的遥控信号,并通过串口1打印给上位机
位带操作:
这里我随便找了一个STM32能用的位带地址操作的宏定义,将其放在.h文件即可:
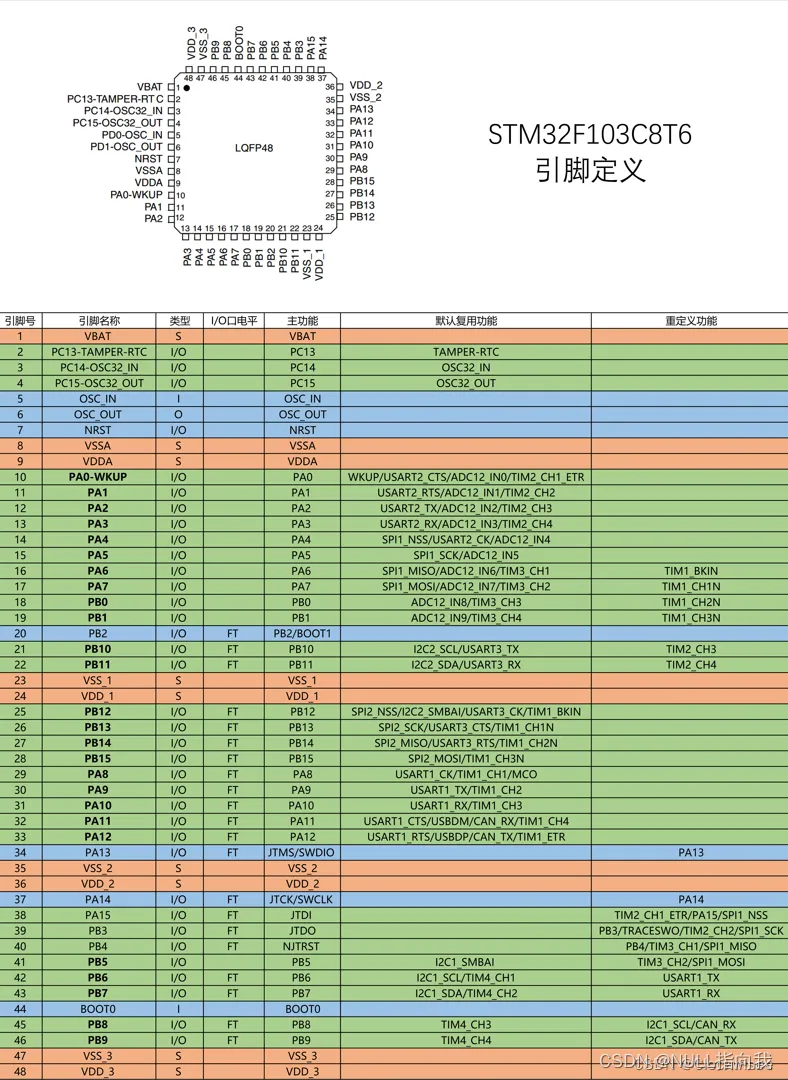
因为STM32 F103 C8T6的引脚只有PA 与 PB 端口,因此我将多出来的注释掉了~~
//IO口地址映射
//输出寄存器
#define GPIOA_ODR_Addr (GPIOA_BASE+12)//0x4001280C
#define GPIOB_ODR_Addr (GPIOB_BASE+12)//0x40010C0C
//#define GPIOC_ODR_Addr (GPIOC_BASE+12)//0x4001100C
//#define GPIOD_ODR_Addr (GPIOD_BASE+12)//0x4001140C
//#define GPTOE_ODR_Addr (GPIOE_BASE+12)//0x4001180C
//#define GPIOF_ODR_Addr (GPIOF_BASE+12)//0x40011A0C
//#define GPIOG_ODR_Addr (GPIOG_BASE+12)//0x40011E0C
//输入寄存器
#define GPIOA_IDR_Addr (GPIOA_BASE+8)//0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE+8)//0x40010C08
//#define GPIOC_IDR_Addr (GPIOC_BASE+8)//0x40011008
//#define GPIOD_IDR_Addr (GPIOD_BASE+8)//0x40011408
//#define GPIOE_IDR_Addr (GPIOE_BASE+8)//0x40011808
//#define GPTOF_IDR_Addr (GPIOF_BASE+8)//0x40011A08
//#define GPTOG_IDR_Addr (GPIOG_BASE+8)//0x40011E08
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n)//输出
#define PAin(n) BIT_ADDR (GPIOA_IDR_Addr,n)//输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n)//输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n)//输入
//#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n)//输出
//#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n)//输入
//
//#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n)//输出
//#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n)//输入
//
//#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n)//输出
//#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n)//输入
//
//#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n)//输出
//#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n)//输入
//
//#define PGout(n) BIT_ADDR(GPIOG_oDR_Addr,n)//输出
//#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n)//输入定时器4初始化:
//红外遥控初始化
//设置IO以及定时器4的输入捕获
void Remote_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //使能PORTB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE); //TIM4 时钟使能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PB9 输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_9); //初始化GPIOB.9
TIM_TimeBaseStructure.TIM_Period = 10000; //设定计数器自动重装值 最大10ms溢出
TIM_TimeBaseStructure.TIM_Prescaler =(72-1); //预分频器,1M的计数频率,1us加1.
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx
TIM_ICInitStructure.TIM_Channel = TIM_Channel_4; // 选择输入端 IC4映射到TI4上
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM_ICInitStructure.TIM_ICFilter = 0x03;//IC4F=0011 配置输入滤波器 8个定时器时钟周期滤波
TIM_ICInit(TIM4, &TIM_ICInitStructure);//初始化定时器输入捕获通道
TIM_Cmd(TIM4,ENABLE ); //使能定时器4
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_ITConfig( TIM4,TIM_IT_Update|TIM_IT_CC4,ENABLE);//允许更新中断 ,允许CC4IE捕获中断
}
//遥控器接收状态
//[7]:收到了引导码标志
//[6]:得到了一个按键的所有信息
//[5]:保留
//[4]:标记上升沿是否已经被捕获
//[3:0]:溢出计时器
u8 RmtSta=0;
u16 Dval; //下降沿时计数器的值
u32 RmtRec=0; //红外接收到的数据
u8 RmtCnt=0; //按键按下的次数
//定时器4中断服务程序
void TIM4_IRQHandler(void)
{
if(TIM_GetITStatus(TIM4,TIM_IT_Update)!=RESET)//计时器更新中断
{
if(RmtSta&0x80) //上次有数据被接收到了
{
RmtSta&=~0X10; //取消上升沿已经被捕获标记
if((RmtSta&0X0F)==0X00)
RmtSta|=1<<6; //标记已经完成一次按键的键值信息采集
if((RmtSta&0X0F)<14)
RmtSta++;
else
{
RmtSta&=~(1<<7); //清空引导标识
RmtSta&=0XF0; //清空计数器
}
}
}
if(TIM_GetITStatus(TIM4,TIM_IT_CC4)!=RESET)//捕获中断
{
if(RDATA)//上升沿捕获
{
TIM_OC4PolarityConfig(TIM4,TIM_ICPolarity_Falling); //CC4P=1 设置为下降沿捕获
TIM_SetCounter(TIM4,0); //清空定时器值
RmtSta|=0X10; //标记上升沿已经被捕获
}
else //下降沿捕获
{
Dval=TIM_GetCapture4(TIM4); //读取CCR4也可以清CC4IF标志位
TIM_OC4PolarityConfig(TIM4,TIM_ICPolarity_Rising); //CC4P=0 设置为上升沿捕获
if(RmtSta&0X10) //完成一次高电平捕获
{
if(RmtSta&0X80)//接收到了引导码
{
if(Dval>300&&Dval<800) //560为标准值,560us
{
RmtRec<<=1; //左移一位.
RmtRec|=0; //接收到0
}
else if(Dval>1400&&Dval<1800) //1680为标准值,1680us
{
RmtRec<<=1; //左移一位.
RmtRec|=1; //接收到1
}
else if(Dval>2200&&Dval<2600) //得到按键键值增加的信息 2500为标准值2.5ms
{
RmtCnt++; //按键次数增加1次
RmtSta&=0XF0; //清空计时器
}
}
else if(Dval>4200&&Dval<4700) //4500为标准值4.5ms
{
RmtSta|=1<<7; //标记成功接收到了引导码
RmtCnt=0; //清除按键次数计数器
}
}
RmtSta&=~(1<<4);//取消上升沿已经被捕获标记
}
}
TIM_ClearITPendingBit(TIM4,TIM_IT_Update|TIM_IT_CC4);
}定时器4中断服务程序:
//遥控器接收状态
//[7]:收到了引导码标志
//[6]:得到了一个按键的所有信息
//[5]:保留
//[4]:标记上升沿是否已经被捕获
//[3:0]:溢出计时器
u8 RmtSta=0;
u16 Dval; //下降沿时计数器的值
u32 RmtRec=0; //红外接收到的数据
u8 RmtCnt=0; //按键按下的次数
//定时器4中断服务程序
void TIM4_IRQHandler(void)
{
if(TIM_GetITStatus(TIM4,TIM_IT_Update)!=RESET)//计时器更新中断
{
if(RmtSta&0x80) //上次有数据被接收到了
{
RmtSta&=~0X10; //取消上升沿已经被捕获标记
if((RmtSta&0X0F)==0X00)
RmtSta|=1<<6; //标记已经完成一次按键的键值信息采集
if((RmtSta&0X0F)<14)
RmtSta++;
else
{
RmtSta&=~(1<<7); //清空引导标识
RmtSta&=0XF0; //清空计数器
}
}
}
if(TIM_GetITStatus(TIM4,TIM_IT_CC4)!=RESET)//捕获中断
{
if(RDATA)//上升沿捕获
{
TIM_OC4PolarityConfig(TIM4,TIM_ICPolarity_Falling); //CC4P=1 设置为下降沿捕获
TIM_SetCounter(TIM4,0); //清空定时器值
RmtSta|=0X10; //标记上升沿已经被捕获
}
else //下降沿捕获
{
Dval=TIM_GetCapture4(TIM4); //读取CCR4也可以清CC4IF标志位
TIM_OC4PolarityConfig(TIM4,TIM_ICPolarity_Rising); //CC4P=0 设置为上升沿捕获
if(RmtSta&0X10) //完成一次高电平捕获
{
if(RmtSta&0X80)//接收到了引导码
{
if(Dval>300&&Dval<800) //560为标准值,560us
{
RmtRec<<=1; //左移一位.
RmtRec|=0; //接收到0
}
else if(Dval>1400&&Dval<1800) //1680为标准值,1680us
{
RmtRec<<=1; //左移一位.
RmtRec|=1; //接收到1
}
else if(Dval>2200&&Dval<2600) //得到按键键值增加的信息 2500为标准值2.5ms
{
RmtCnt++; //按键次数增加1次
RmtSta&=0XF0; //清空计时器
}
}
else if(Dval>4200&&Dval<4700) //4500为标准值4.5ms
{
RmtSta|=1<<7; //标记成功接收到了引导码
RmtCnt=0; //清除按键次数计数器
}
}
RmtSta&=~(1<<4);//取消上升沿已经被捕获标记
}
}
TIM_ClearITPendingBit(TIM4,TIM_IT_Update|TIM_IT_CC4);
}处理红外键盘:
//处理红外键盘
//返回值:
// 0,没有任何按键按下
//其他,按下的按键键值.
u8 Remote_Scan(void)
{
u8 sta=0;
u8 t1,t2;
if(RmtSta&(1<<6))//得到一个按键的所有信息了
{
t1=RmtRec>>24; //得到地址码
t2=(RmtRec>>16)&0xff; //得到地址反码
if((t1==(u8)~t2)&&t1==REMOTE_ID)//检验遥控识别码(ID)及地址
{
t1=RmtRec>>8;
t2=RmtRec;
if(t1==(u8)~t2)sta=t1;//键值正确
}
if((sta==0)||((RmtSta&0X80)==0))//按键数据错误/遥控已经没有按下了
{
RmtSta&=~(1<<6);//清除接收到有效按键标识
RmtCnt=0; //清除按键次数计数器
}
}
return sta;
}
主函数:
这里主函数为了防止打印反馈太频繁,改为定时器2 每100ms赋值一次Remote_temp变量 红外的接收值
#include "main.h"
char Remote_temp,Remote_cnt;
int main(void)
{
init_ALL(); //初始化所有函数:
printf("HELLO \r\n");
while(1)
{
if(Remote_temp!=0)
{
printf("Remote_temp(DEX)=%d\r\n",Remote_temp); //十进制打印一次键值
printf("Remote_temp(HEX)=%x\r\n",Remote_temp); //HEX 16 进制打印一次键值
}
}
}
//初始化所有函数:
void init_ALL(void)
{
Usart1_Init(115200);
SysTick_Init(72); //初始化滴答计时器
Timer2_Init(); //初始化定时器2
Remote_Init(); //红外按键初始化
}
//定时器2中断服务函数
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
if(++Remote_cnt==10) //100ms赋值一次红外键值
{
Remote_cnt=0; Remote_temp=Remote_Scan();
}
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);//清出中断寄存器标志位,用于退出中断
}
}
测试效果:

文章来源:https://www.toymoban.com/news/detail-665329.html
工程下载:
https://download.csdn.net/download/qq_64257614/88241288?spm=1001.2014.3001.5503文章来源地址https://www.toymoban.com/news/detail-665329.html
到了这里,关于STM32 F103C8T6学习笔记12:红外遥控—红外解码-位带操作的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!