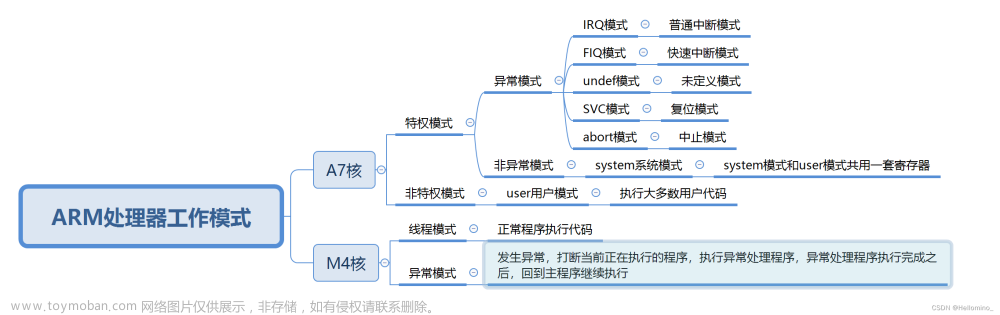
1. 思维导图

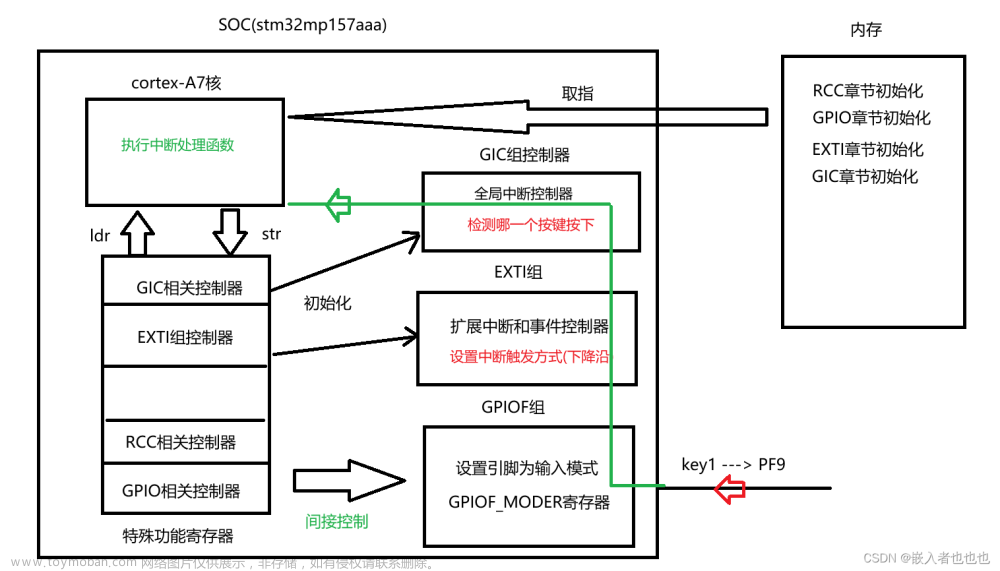
2. 实验要求: 实现KEY1/LEY2/KE3三个按键,中断触发打印一句话,并且灯的状态取反 key1 ----> LED3灯状态取反 key2 ----> LED2灯状态取反 key3 ----> LED1灯状态取反
key3.h
#ifndef __KEY3_H__
#define __KEY3_H__
#include "stm32mp1xx_rcc.h"
#include "stm32mp1xx_gpio.h"
#include "stm32mp1xx_uart.h"
#include "stm32mp1xx_gic.h"
#include "stm32mp1xx_exti.h"
//key1-->PF9
//key2-->PF7
//key3-->PF8
typedef enum
{
EXTI1 = 1,
EXTI2,
EXTI3,
EXTI4,
EXTI5,
EXTI6,
EXTI7,
EXTI8,
EXTI9,
EXTI10,
EXTI11,
EXTI12,
EXTI13,
EXTI14,
EXTI15
}exti_event_t;
//终端触发方式
typedef enum
{
RISING_TRIGGER = 0,
FALLING_TRIGGER
} trigger_t;
void hal_exti_init(exti_event_t exti_event,unsigned int ground,trigger_t trigger); //RCC/GPIO/EXTI章节初始化
void hal_gic_init(unsigned int interruptid,unsigned int priority) ; //GIC章节初始化
#endifled.h
#ifndef _LED_H__ //防止头文件重复包含_
#define _LED_H__
#include "stm32mp1xx_gpio.h"
//RCC_MP_AHB4ENSETR寄存器封装
#define RCC_MP_AHB4ENSETR (*(volatile unsigned int*)0x50000A28)
//对引脚编号进行封装
#define GPIO_PIN_0 0
#define GPIO_PIN_1 1
#define GPIO_PIN_2 2
#define GPIO_PIN_3 3
#define GPIO_PIN_4 4
#define GPIO_PIN_5 5
#define GPIO_PIN_6 6
#define GPIO_PIN_7 7
#define GPIO_PIN_8 8
#define GPIO_PIN_9 9
#define GPIO_PIN_10 10
#define GPIO_PIN_11 11
#define GPIO_PIN_12 12
#define GPIO_PIN_13 13
#define GPIO_PIN_14 14
#define GPIO_PIN_15 15
//使用枚举封装MODER寄存器
typedef enum{
INPUT, //输入 0
OUTPUT, //输出 1
ALT, //复用 2
ANALOG //模拟 3
}gpio_moder_t;
//使用枚举封装OTYPER寄存器
typedef enum{
PP, //推挽 0
DP //开漏 1
}gpio_otyper_t;
//使用枚举封装OSPEEDR寄存器
typedef enum{
LOWSPEED, //低速 0
MEDSPEED, //中速 1
HIGHSPEED, //高速 2
VERYHIGHSPEED //快速 3
}gpio_ospeedr_t;
//使用枚举封装PURDR寄存器
typedef enum{
NO_PUPDR, //禁止上下拉电阻 0
PU, //上拉 1
PD //下拉 2
}gpio_pupdr_t;
//封装初始化结构体
typedef struct{
gpio_moder_t moder; //模式寄存器
gpio_otyper_t otyper; //输出类型寄存器
gpio_ospeedr_t ospeedr; //输出速率寄存器
gpio_pupdr_t pupdr; //是否上下电阻寄存器
}gpio_init_t;
//使用枚举封装ODR寄存器
typedef enum{
GPIO_RESET_T, //熄灭 0
GPIO_SET_T //点亮 1
}gpio_status_t;
//函数功能:GPIO引脚初始化操作
//参数1:GPIO组号
//参数2:引脚编号
//参数3:初始化内容
void hal_gpio_init(volatile gpio_t * gpiox,unsigned int pin,gpio_init_t* init);
//函数功能:GPIO引脚操作,写1点亮,写0熄灭
//参数1:GPIO组号
//参数2:引脚编号
//参数3:写的内容
void hal_gpio_write(volatile gpio_t* gpiox,unsigned int pin,gpio_status_t status);
#endifkey3.c
#include "key3.h"
//key1 -----> PF9
//key2 -----> PF7
//key3 -----> PF8
void hal_exti_init(exti_event_t exti_event,unsigned int ground,trigger_t trigger) //RCC/GPIO/EXTI章节初始化
{
//RCC章节初始化
//使能GPIOF组控制器 -----> RCC_MP_AHB4ENSETR[5] = 1
RCC->MP_AHB4ENSETR |= (0x1 << 5);
//GPIO章节初始化
//设置KEY1按键为输入模式 -----> GPIOF_MODER[19:18] = 00
//设置KEY2按键为输入模式 -----> GPIOF_MODER[15:14] = 00
//设置KEY3按键为输入模式 -----> GPIOF_MODER[17:16] = 00
GPIOF->MODER &= (~(0x3f << 14));
//EXTI章节初始化
//1、EXTI_EXTICRn(n=1~4):EXTI external interrupt selection register ===> 外部中断选择寄存器,
//设置KEY1按键与EXTI9进行连接,EXTI_EXTICR3[15:8] = 0x05,
//设置KEY2按键与EXTI7进行连接,EXTI_EXTICR2[31:24] = 0x05
//设置KEY1按键与EXTI8进行连接,EXTI_EXTICR3[7:0] = 0x05
switch(exti_event / 4)
{
case 0:
EXTI->EXTICR1 &= (~(0xff << (exti_event % 4 *8)));
EXTI->EXTICR1 |= (ground << (exti_event % 4 *8));
break;
case 1:
EXTI->EXTICR2 &= (~(0xff << (exti_event % 4 *8)));
EXTI->EXTICR2 |= (ground << (exti_event % 4 *8));
break;
case 2:
EXTI->EXTICR3 &= (~(0xff << (exti_event % 4 *8)));
EXTI->EXTICR3 |= (ground << (exti_event % 4 *8));
break;
case 3:
EXTI->EXTICR4 &= (~(0xff << (exti_event % 4 *8)));
EXTI->EXTICR4 |= (ground << (exti_event % 4 *8));
break;
default:break;
}
//2、下降沿触发选择寄存器,EXTI_FTSR1[9] = 1,EXTI_FTSR1[7] = 1,EXTI_FTSR1[8] = 1
if(trigger == RISING_TRIGGER)
{
EXTI->RTSR1 |= (0x1 << exti_event);
}
else if(trigger == FALLING_TRIGGER)
{
EXTI->FTSR1 |= (0x1 << exti_event);
}
//3、设置中断屏蔽寄存器,EXTI_IMR1[9] = 1,EXTI_IMR1[7] = 1,EXTI_IMR1[8] = 1
EXTI->C1IMR1 |= (0x1 << exti_event);
}
void hal_gic_init(unsigned int interruptid,unsigned int priority) //GIC章节初始化
{
//1.GICD章节初始化
//设置GICD层组0使能, GICD control register (GICD_CTLR): GICD_CTLR[0] = 1
GICD->CTRL |= 1;
//设置GICD层中断使能,GICD interrupt set-enable register x (GICD_ISENABLERx)
//key1 ----> PF9 ----> EXTI9 ----> 中断号99 ----> 99 / 32 = 3.......3 ----> GICD_ISENABLER3[3] = 1
//key2 ----> PF7 ----> EXTI7 ----> 中断号97 ----> 97 / 32 = 3.......1 ----> GICD_ISENABLER3[1] = 1
//key3 ----> PF8 ----> EXTI8 ----> 中断号98 ----> 98 / 32 = 3.......2 ----> GICD_ISENABLER3[2] = 1
GICD->ISENABLER[interruptid / 32] |= (0x1 << (interruptid % 32));
//设置GICD层中断优先级寄存器,GICD interrupt priority register x (GICD_IPRIORITYRx)
//key1 ----> PF9 ----> EXTI9 ----> 中断号99 ----> 99 / 4 = 24.......3 ----> GICD_IPRIORITYR24[31:27] = 0b00000
//key2 ----> PF7 ----> EXTI7 ----> 中断号97 ----> 97 / 4 = 24.......1 ----> GICD_IPRIORITYR24[15:11] = 0b00000
//key3 ----> PF8 ----> EXTI8 ----> 中断号98 ----> 98 / 4 = 24.......2 ----> GICD_IPRIORITYR24[23:19] = 0b0000
GICD->IPRIORITYR[interruptid / 4] &= (~(0x1f << (interruptid % 4 * 8+3)));
GICD->IPRIORITYR[interruptid / 4] |= (priority << (interruptid % 4 * 8+3));
//设置GICD层中断目标分配给CPU0,GICD interrupt processor target register x (GICD_ITARGETSRx)
//key1 ----> PF9 ----> EXTI9 ----> 中断号99 ----> 99 / 4 = 24.......3 ----> GICD_ITARGETSR24[25:24] = 0b01
//key2 ----> PF7 ----> EXTI7 ----> 中断号97 ----> 97 / 4 = 24.......1 ----> GICD_ITARGETSR24[9:8] = 0b01
//key3 ----> PF8 ----> EXTI8 ----> 中断号98 ----> 98 / 4 = 24.......2 ----> GICD_ITARGETSR24[17:16] = 0b01
GICD->ITARGETSR[interruptid / 4] &= (~(0x3 << (interruptid % 4 * 8)));
GICD->ITARGETSR[interruptid / 4] |= (0x1 << (interruptid % 4 * 8));
//2.GICC章节初始化
//设置GICC层组0使能,GICC input priority mask register (GICC_PMR),GICC_CTLR[0] = 1
GICC->CTRL |= 1;
//设置GICC层中断优先级寄存器,GICC control register (GICC_CTLR),GICC_PMR[7:3] = 0b11111
GICC->PMR |= (0x1f << 3);
}
led.c
#include "led.h"
//函数功能:GPIO引脚初始化操作
//参数1:GPIO组号
//参数2:引脚编号
//参数3:初始化内容
void hal_gpio_init(volatile gpio_t* gpiox,unsigned int pin,gpio_init_t* init)
{
//1. 设置GPIO引脚模式
gpiox->MODER &= (~(0x3 << (pin*2)));
gpiox->MODER |= (init->moder << (pin*2));
//2. 设置GPIO引脚输出类型
gpiox->OTYPER &= (~(0x1<<pin));
gpiox->OTYPER |= (init->otyper << pin);
//3. 设置GPIO引脚输出速率
gpiox->OSPEEDR &= (~(0x3 << (pin*2)));
gpiox->OSPEEDR |= (init->ospeedr << (pin*2));
//4. 设置GPIO引脚是否需要上下拉电阻
gpiox->PUPDR &= (~(0x3 << (pin*2)));
gpiox->PUPDR |= (init->pupdr << (pin*2));
}
//函数功能:GPIO引脚操作,写1点亮,写0熄灭
//参数1:GPIO组号
//参数2:引脚编号
//参数3:写的内容
void hal_gpio_write(volatile gpio_t* gpiox,unsigned int pin,gpio_status_t status)
{
if(status == GPIO_RESET_T) //熄灭
{
gpiox->ODR &= (~(0x1<<pin));
}
else if(status == GPIO_SET_T) //点亮
{
gpiox->ODR |= (0x1<<pin);
}
}do_irq.c
extern void printf(const char *fmt, ...);
unsigned int i = 0;
#include "stm32mp1xx_gic.h"
#include "stm32mp1xx_exti.h"
#include "led.h"
//中断处理函数
void do_irq(void)
{
//1.获取中断号 IAR[9:0]
unsigned int interrupt_id = GICC->IAR & (0x3ff);
//2.判断终端号,并执行相关操作......
switch(interrupt_id)
{
case 99:
printf("key1键按下\n");
GPIOE->ODR ^= (0x1 << 8); //LED3, PE8
//3.清除EXTI层中断挂起标志位
EXTI->FPR1 |= (0x1 << 9); //key1
//4.清除GICD层中断挂起标志位
GICD->ICPENDR[3] |= (0x1 << 3); //ke1
break;
case 97:
printf("key2键按下\n");
GPIOF->ODR ^= (0x1 << 10); //LED2, PF10
//3.清除EXTI层中断挂起标志位
EXTI->FPR1 |= (0x1 << 7); //key2
//4.清除GICD层中断挂起标志位
GICD->ICPENDR[3] |= (0x1 << 1); //key2
break;
case 98:
printf("key3键按下\n");
GPIOE->ODR ^= (0x1 << 10); //LED1, PE10
//3.清除EXTI层中断挂起标志位
EXTI->FPR1 |= (0x1 << 8); //key3
//4.清除GICD层中断挂起标志位
GICD->ICPENDR[3] |= (0x1 << 2); //key3
break;
}
//5.清除中断号
GICC->EOIR = interrupt_id;
}main.c
#include "key3.h"
#include "led.h"
extern void printf(const char *fmt, ...);
void delay_ms(int ms)
{
int i,j;
for(i = 0; i < ms;i++)
for (j = 0; j < 1800; j++);
}
#define GPIOF_GROUP 0x05
#define KEY1_ID 99
#define KEY2_ID 97
#define KEY3_ID 98
int main()
{
RCC_MP_AHB4ENSETR |= (0x3<<4); //使能GPIOE/GPIOF组
gpio_init_t init = {OUTPUT,PP,LOWSPEED,NO_PUPDR}; //初始化GPIO结构体
//初始化LED灯
hal_gpio_init(GPIOE,GPIO_PIN_10,&init); //LED1, PE10
hal_gpio_init(GPIOF,GPIO_PIN_10,&init); //LED2, PF10
hal_gpio_init(GPIOE,GPIO_PIN_8,&init); //LED3, PE8
hal_exti_init(EXTI9,GPIOF_GROUP, FALLING_TRIGGER) ; //key1初始化
hal_exti_init(EXTI7,GPIOF_GROUP, FALLING_TRIGGER) ; //key2初始化
hal_exti_init(EXTI8,GPIOF_GROUP, FALLING_TRIGGER) ; //key3初始化
hal_gic_init(KEY1_ID,9);
hal_gic_init(KEY2_ID,7);
hal_gic_init(KEY3_ID,8);
while(1)
{
}
return 0;
}
运行结果:文章来源:https://www.toymoban.com/news/detail-669138.html
 文章来源地址https://www.toymoban.com/news/detail-669138.html
文章来源地址https://www.toymoban.com/news/detail-669138.html
到了这里,关于【ARM】Day8 中断的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!