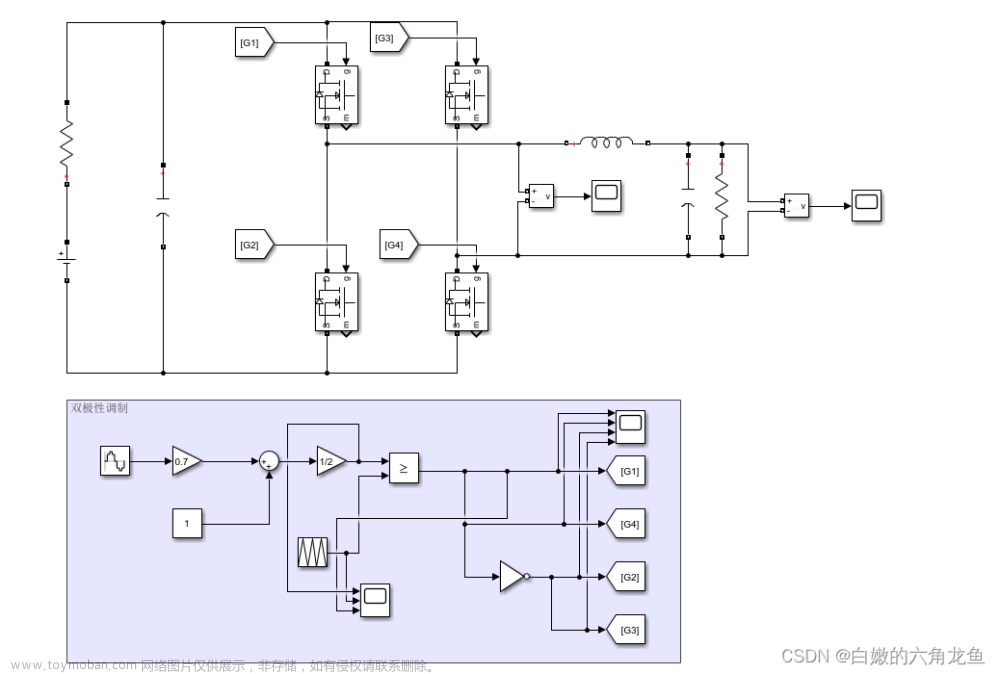
0、仿真控制框图
1、增加p的作用(增加响应)P

2、增加I的作用(消除稳差)PI

3、增加D的作用(抑制波动)PID

加入对噪声很敏文章来源:https://www.toymoban.com/news/detail-669826.html
4、综合比对
 文章来源地址https://www.toymoban.com/news/detail-669826.html
文章来源地址https://www.toymoban.com/news/detail-669826.html
到了这里,关于PID直观感受简述的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!