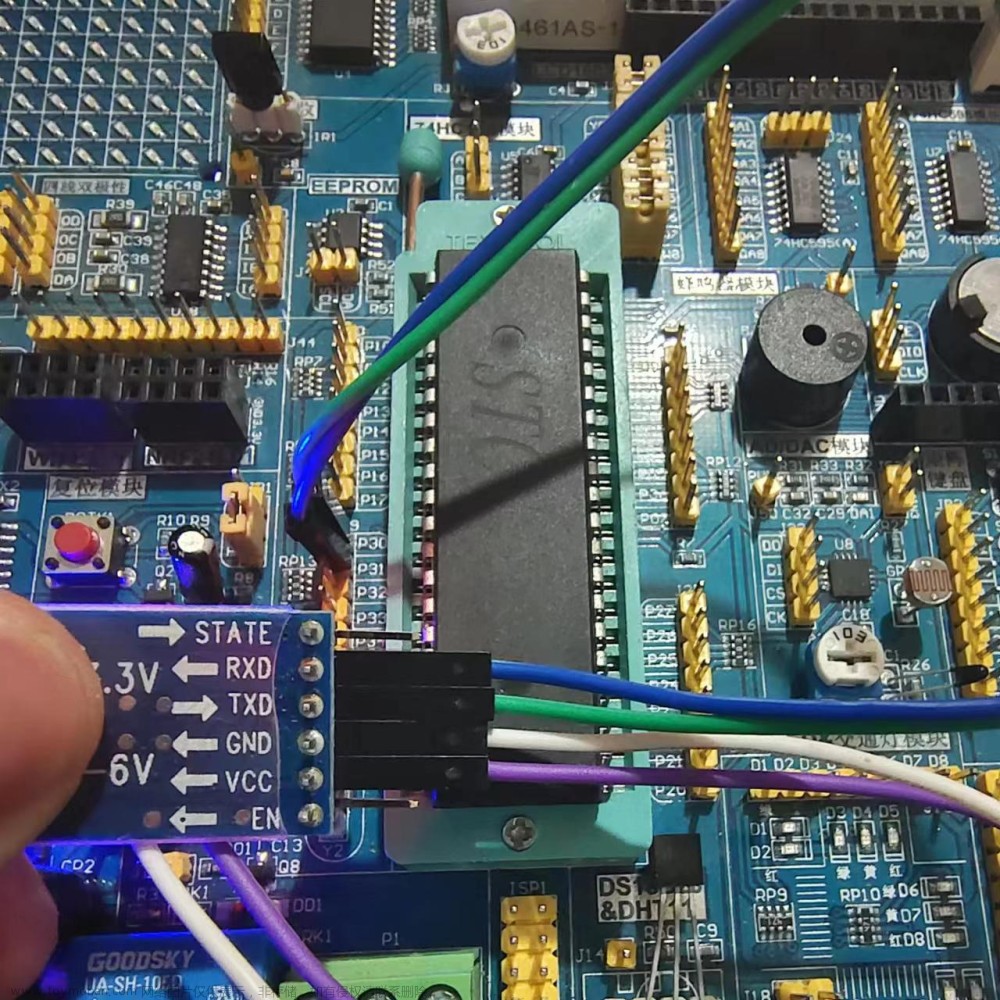
原理图显示使用usart3串口使用的是PB10和PB11引脚
直接配置usart3串口协议文章来源:https://www.toymoban.com/news/detail-669894.html
void usart3_init(uint32_t baud)
{
GPIO_InitTypeDef GPIO_InitStructureure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//端口B硬件时钟打开
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE);
//串口3硬件时钟打开
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE);
//配置PA9 PA10为AF模式(复用功能)
GPIO_InitStructureure.GPIO_Pin = GPIO_Pin_11 | GPIO_Pin_10 ; //9 10号引脚
GPIO_InitStructureure.GPIO_Mode = GPIO_Mode_AF;//输出模式第三种模式AF模式
GPIO_InitStructureure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructureure.GPIO_Speed = GPIO_High_Speed;//高速,速度越高,响应越快,但是功耗会更高
GPIO_InitStructureure.GPIO_PuPd = GPIO_PuPd_NOPULL;//不使能上下拉电阻
GPIO_Init(GPIOB,&GPIO_InitStructureure);
//由于引脚支持很多功能,需要指定该引脚的功能,当前要制定支持USART1
GPIO_PinAFConfig(GPIOB,GPIO_PinSource11,GPIO_AF_USART3);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource10,GPIO_AF_USART3);
//配置USART1相关参数:波特率,数据位,停止位,校验位
USART_InitStructure.USART_BaudRate = baud; //波特率,就是通信的速度
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //8位数据位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //1个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //不需要校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制功能不需要
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //串口允许发送和接收数据
USART_Init(USART3, &USART_InitStructure);
//配置中断触发方式,接收到一个字节,就通知CPU处理
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);
//NVIC配置其优先级
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn; //中断号
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //响应优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //打开通道给NVIC管理
NVIC_Init(&NVIC_InitStructure);
//使能USART1工作
USART_Cmd(USART3, ENABLE);
}
主函数代码文章来源地址https://www.toymoban.com/news/detail-669894.html
//通过usart3串口发送数据给pc端
void usart3_send_str(char *str)
{
char *p = str;
while(*p!='\0')
{
/* 发送一个字节 */
USART_SendData(USART3,*p);
/* 等待发送完毕 */
while(USART_GetFlagStatus(USART3,USART_FLAG_TXE) == RESET);
p++;
}
}
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
//抢占优先级0~3,支持4级!
//响应优先级0~3,支持4级!
key_init();
Led_init();
usart1_init(115200);
usart3_init(9600);
usart3_send_str("AT+NAMETWen\r\n");
while(1)
{
}
}
void USART3_IRQHandler(void)
{
uint8_t d;
if(USART_GetITStatus(USART3,USART_IT_RXNE) == SET)
{
d = USART_ReceiveData(USART3);
if(d == '1')PFout(10)=0;
if(d == 'a')PFout(10)=1;
/* 发送一个字节 */
USART_SendData(USART1,d);
/* 等待发送完毕 */
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);
/* 告诉CPU,已经完成接收中断请求,可以响应新的接收中断请求 */
USART_ClearITPendingBit(USART3,USART_IT_RXNE);
}
}
到了这里,关于stm32 之20.HC-06蓝牙模块的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!