一.图的定义和分类
1.通俗定义
图是由一组顶点和一组能够将两个顶点连接的边组成的。
2.图的分类
按照连接两个顶点的边的不同,可以把图分为以下两种:
无向图:边仅仅连接两个顶点,没有其他含义;
有向图:边不仅连接两个顶点,并且具有方向;
另外图还可以分为赋权图和非赋权图,一个是每条边都带有权值,一个是每条边都没有权值。
通常权值是具有某种实际意义的数,比如2个顶点之间的距离,耗费等。

综上图可以大致分为无向图,有向图,赋权无向图,赋权有向图四种。
注:一般情况下,图中两个顶点只有一条边连接。
3.数学定义

4.图的相关概念
相邻顶点:
当两个顶点通过一条边相连时,我们称这两个顶点是相邻的,并且称这个边依赖于这两个顶点。
度 出度 入度:
某个顶点的度就是依附于该顶点的边的个数。

子图:
是一幅图的所有边的子集(包含这些边依附的顶点)组成的图。
路径:
是由边顺序连接的一系列的顶点组成。
环:
是一条至少含有一条边且终点和起点相同的路径。
连通图:
如果图中任一一个顶点都存在一条路径到达另外一个顶点,那么这幅图就称之为联通图。
连通子图:
一个非联通图由若干连通的部分组成,每一个连通的部分都可以成为该图的连通子图。
连通分量:
连通子图的数量

完全图/简单完全图:
假设一个图有n个顶点,那么如果任意两个顶点之间都有边的话,该图就称为完全图。
n个端点的完全无向图有n(n−1)/2条边,而完全有向图有n(n-1)条边。【相当于之前每两个点之间只有一条边,现在有一来一去两条边】
二.图的存储结构
要表示一幅图,只需要表示清楚一下两部分内容即可:
1.图中所有的顶点;
2.所有连接顶点的边;
一般的话我们只需要清楚点的个数,然后存储好边的信息就够了。
常见图(更准确的说是边)的存储结构有两种:邻接矩阵和邻接表
【1】邻接矩阵
1.使用一个V*V的二维数组int[V][V] adj。
2.无向图如果顶点v和顶点w相连,我们只需要把adj[v][w]和adj[w][v]的值设置为1,否则设置为0即可。

有向图v->w,把adj[v][w]的值设置为1,w->v,把adj[w][v]的值设置为1。

3.如果是赋权图的话直接将值换为对应的权值即可。

很明显,邻接矩阵这种存储方式的空间复杂度是V^2的,如果我们处理的问题规模比较大的话,内存空间极有可能不够用。
【2】邻接表
1.使用一个大小为V的数组Queue[V] adj,把索引看做是顶点;
2.无向图每个索引处adj[v]存储了一个链表,该链表中存储的是所有与该顶点相邻的其他顶点

有向图的话一般使用的是逆转链表,简单说就是每个结点存储以这个点为终点的单链表。

上图表示的意思是1连接4,3,2;而2连接1,5;而3连接1,5;而4连接1,5;而5连接4,3,2。
很明显,邻接表的空间并不是是线性级别的,所以后面我们一直采用邻接表这种存储形式来表示图。
三.图的搜索
1.深度优先搜索
所谓的深度优先搜索,指的是在搜索时,如果遇到一个结点既有子结点,又有兄弟结点,那么先找子结点,然后找兄弟结点。
一般是先序遍历,即根结点 ---> 左子树 ---> 右子树。
复杂度:用邻接矩阵实现复杂度为O(n的平方),用邻接表实现的时间复杂度为O(n+e)【n是点的个数,e是边的个数】
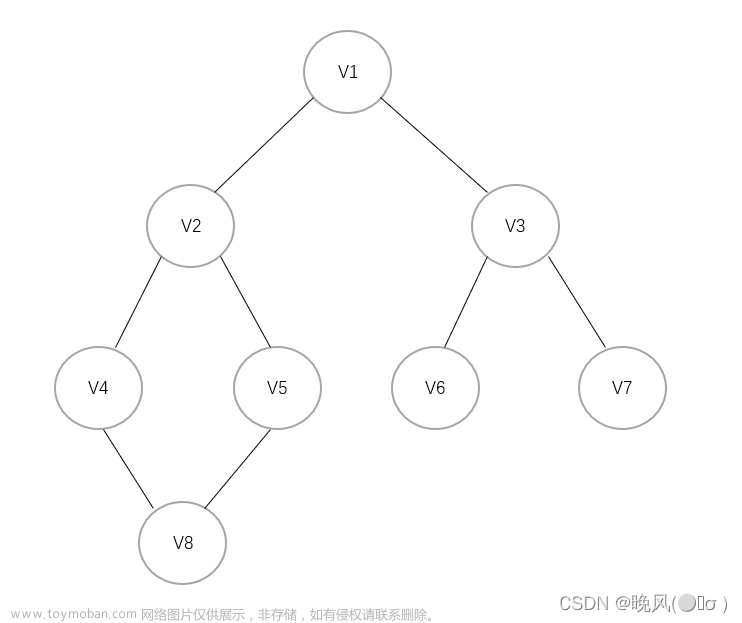
例:

2.广度优先搜索
所谓的广度优先搜索,指的是在搜索时,如果遇到一个结点既有子结点,又有兄弟结点,那么先找兄弟结点,然后找子结点。
需要注意的是,图的广度优先搜索和树一样,如果找完兄弟节点后,要返回刚开始的结点,去寻找其子结点。
复杂度:用邻接矩阵实现复杂度为O(n的平方),用邻接表实现的时间复杂度为O(n+e)【n是点的个数,e是边的个数】
例:下面这道题选择D文章来源:https://www.toymoban.com/news/detail-670515.html
 文章来源地址https://www.toymoban.com/news/detail-670515.html
文章来源地址https://www.toymoban.com/news/detail-670515.html
到了这里,关于算法与数据结构(十)--图的入门的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!