串行 FIR 滤波器设计
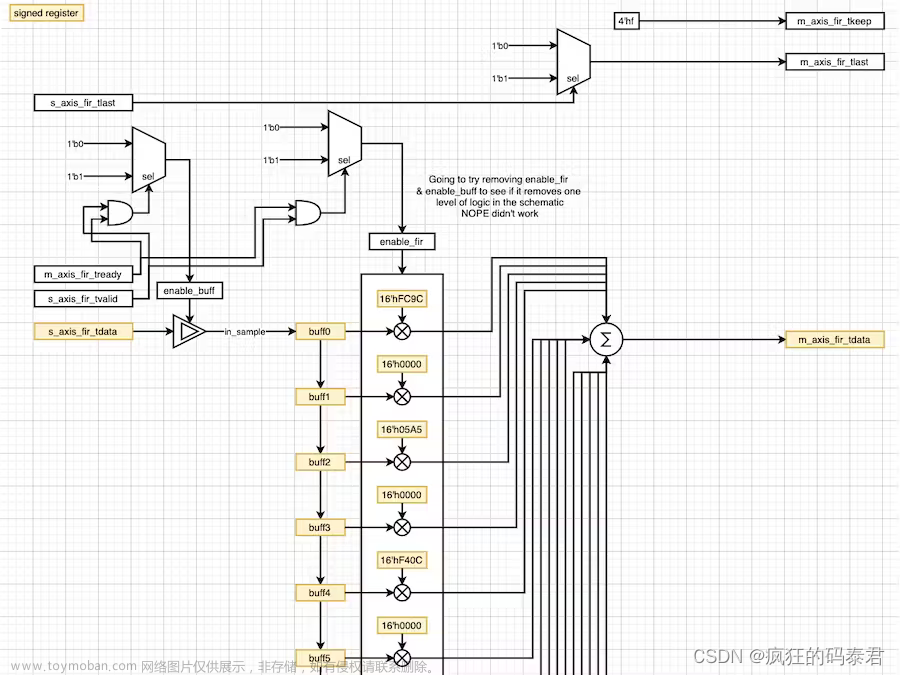
串行设计,就是在 16 个时钟周期内对 16 个延时数据分时依次进行乘法、加法运算,然后在时钟驱动下输出滤波值。考虑到 FIR 滤波器系数的对称性,计算一个滤波输出值的周期可以减少到 8 个。串行设计时每个周期只进行一次乘法运算,所以设计中只需一个乘法器即可。此时数据需要每 8 个时钟周期有效输入一次,但是为了保证输出信号频率的正确性,工作时钟需要为采样频率的 8 倍,即 400MHz。这种方法的优点是资源耗费少,但是工作频率要求高,数据不能持续输出。文章来源:https://www.toymoban.com/news/detail-673323.html
串行设计
/**********************************************************
>> Description : fir study with serial tech
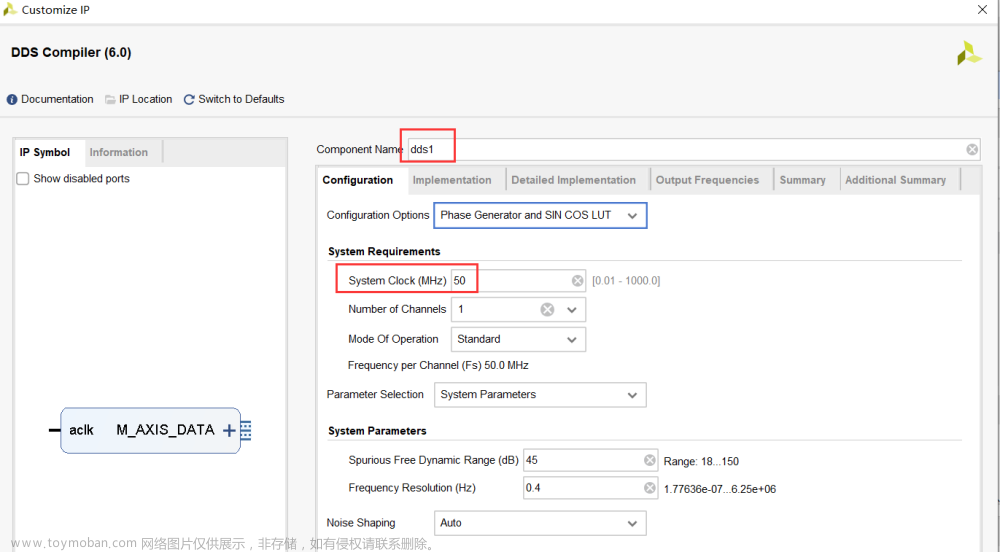
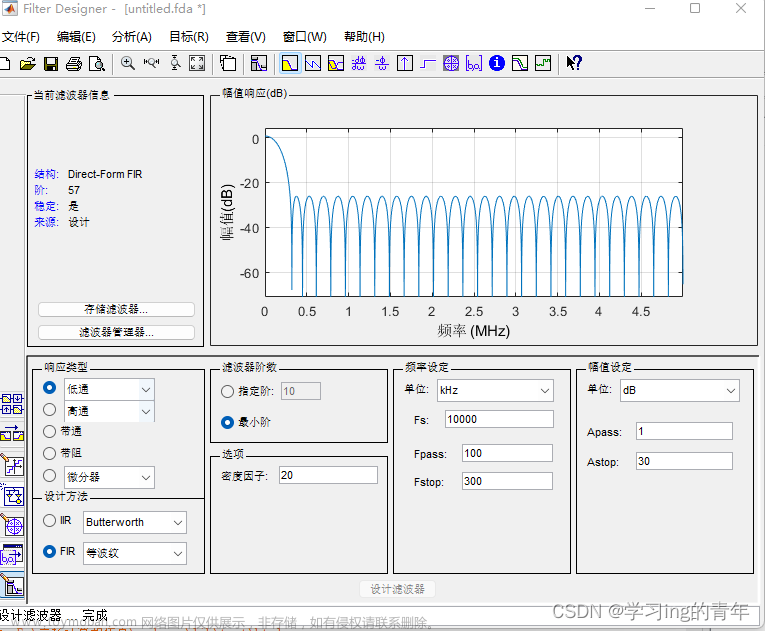
>> : Fs:50Mhz, fstop:1-6Mhz, order:16, sys clk:400MHz
***********************************************************/
`define SAFE_DESIGN
module fir_serial(
input rstn,
input clk, // 系统工作时钟,400MHz
input en , // 输入数据有效信号
input [11:0] xin, // 输入混合频率的信号数据
output valid, // 输出数据有效信号
output [28:0] yout // 输出数据
);
//delay of input data enable
reg [11:0] en_r ;
always @(posedge clk or negedge rstn) begin
if (!rstn) begin
en_r[11:0] <= 'b0 ;
end
else begin
en_r[11:0] <= {en_r[10:0], en} ;
end
end
//fir coeficient
wire [11:0] coe[7:0] ;
assign coe[0] = 12'd11 ;
assign coe[1] = 12'd31 ;
assign coe[2] = 12'd63 ;
assign coe[3] = 12'd104 ;
assign coe[4] = 12'd152 ;
assign coe[5] = 12'd198 ;
assign coe[6] = 12'd235 ;
assign coe[7] = 12'd255 ;
//(1) 输入数据移位部分
reg [2:0] cnt ;
integer i, j ;
always @(posedge clk or negedge rstn) begin
if (!rstn) begin
cnt <= 3'b0 ;
end
else if (en || cnt != 0) begin
cnt <= cnt + 1'b1 ; //8个周期计数
end
end
reg [11:0] xin_reg[15:0];
always @(posedge clk or negedge rstn) begin
if (!rstn) begin
for (i=0; i<16; i=i+1) begin
xin_reg[i] <= 12'b0;
end
end
else if (cnt == 3'd0 && en) begin //每8个周期读入一次有效数据
xin_reg[0] <= xin ;
for (j=0; j<15; j=j+1) begin
xin_reg[j+1] <= xin_reg[j] ; // 数据移位
end
end
end
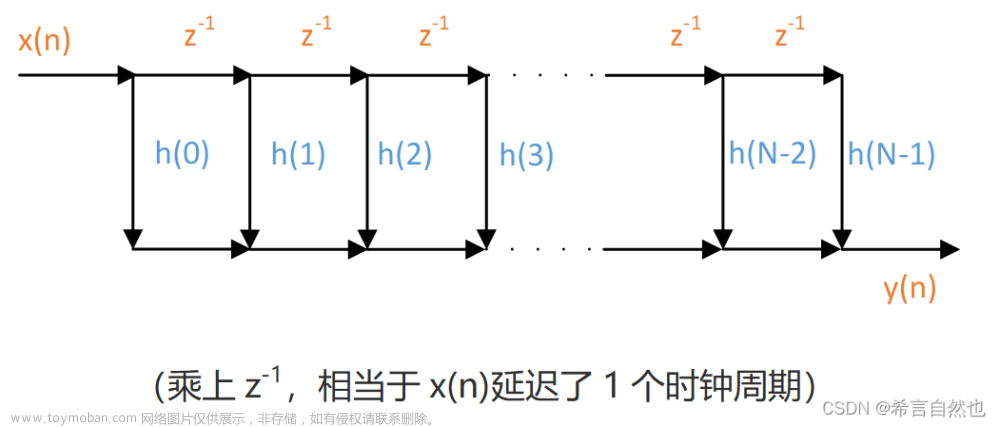
//(2) 系数对称,16个移位寄存器数据进行首位相加
reg [11:0] add_a, add_b ;
reg [11:0] coe_s ;
wire [12:0] add_s ;
wire [2:0] xin_index = cnt>=1 ? cnt-1 : 3'd7 ;
always @(posedge clk or negedge rstn) begin
if (!rstn) begin
add_a <= 13'b0 ;
add_b <= 13'b0 ;
coe_s <= 12'b0 ;
end
else if (en_r[xin_index]) begin //from en_r[1]
add_a <= xin_reg[xin_index] ;
add_b <= xin_reg[15-xin_index] ;
coe_s <= coe[xin_index] ;
end
end
assign add_s = {add_a} + {add_b} ;
//(3) 乘法运算,只用一个乘法
wire [24:0] mout ;
`ifdef SAFE_DESIGN
wire en_mult ;
wire [3:0] index_mult = cnt>=2 ? cnt-1 : 4'd7 + cnt[0] ;
mult_man #(13, 12) u_mult_single //例化自己设计的流水线乘法器
(.clk (clk),
.rstn (rstn),
.data_rdy (en_r[index_mult]), //注意数据时序对应
.mult1 (add_s),
.mult2 (coe_s),
.res_rdy (en_mult),
.res (mout)
);
`else
always @(posedge clk or negedge rstn) begin
if (!rstn) begin
mout <= 25'b0 ;
end
else if (|en_r[8:1]) begin
mout <= coe_s * add_s ; //直接乘
end
end
wire en_mult = en_r[2];
`endif
//(4) 积分累加,8组25bit数据 -> 1组 29bit 数据
reg [28:0] sum ;
reg valid_r ;
//mult output en counter
reg [4:0] cnt_acc_r ;
always @(posedge clk or negedge rstn) begin
if (!rstn) begin
cnt_acc_r <= 'b0 ;
end
else if (cnt_acc_r == 5'd7) begin //计时8个周期
cnt_acc_r <= 'b0 ;
end
else if (en_mult || cnt_acc_r != 0) begin //只要en有效,计时不停
cnt_acc_r <= cnt_acc_r + 1'b1 ;
end
end
always @(posedge clk or negedge rstn) begin
if (!rstn) begin
sum <= 29'd0 ;
valid_r <= 1'b0 ;
end
else if (cnt_acc_r == 5'd7) begin //在第8个累加周期输出滤波值
sum <= sum + mout;
valid_r <= 1'b1 ;
end
else if (en_mult && cnt_acc_r == 0) begin //初始化
sum <= mout ;
valid_r <= 1'b0 ;
end
else if (cnt_acc_r != 0) begin //acculating between cycles
sum <= sum + mout ;
valid_r <= 1'b0 ;
end
end
//时钟锁存有效的输出数据,为了让输出信号不是那么频繁的变化
reg [28:0] yout_r ;
always @(posedge clk or negedge rstn) begin
if (!rstn) begin
yout_r <= 'b0 ;
end
else if (valid_r) begin
yout_r <= sum ;
end
end
assign yout = yout_r ;
//(5) 输出数据有效延迟,即滤波数据丢掉前15个滤波值
reg [4:0] cnt_valid ;
always @(posedge clk or negedge rstn) begin
if (!rstn) begin
cnt_valid <= 'b0 ;
end
else if (valid_r && cnt_valid != 5'd16) begin
cnt_valid <= cnt_valid + 1'b1 ;
end
end
assign valid = (cnt_valid == 5'd16) & valid_r ;
endmodule
testbench
module test ;
//input
reg clk ;
reg rst_n ;
reg en ;
reg [11:0] xin ;
//output
wire [28:0] yout ;
wire valid ;
parameter SIMU_CYCLE = 64'd1000 ;
parameter SIN_DATA_NUM = 200 ;
//=====================================
// 8*50MHz clk generating
localparam TCLK_HALF = (10_000 >>3);
initial begin
clk = 1'b0 ;
forever begin
# TCLK_HALF clk = ~clk ;
end
end
//============================
// reset and finish
initial begin
rst_n = 1'b0 ;
# 30 rst_n = 1'b1 ;
# (TCLK_HALF * 2 * 8 * SIMU_CYCLE) ;
$finish ;
end
//=======================================
// read cos data into register
reg [11:0] stimulus [0: SIN_DATA_NUM-1] ;
integer i ;
initial begin
$readmemh("E:/appdata/SimulationTools/modelsim/demo/filter/FIR_filter/tb/cosx0p25m7p5m12bit.txt", stimulus) ;
en = 0 ;
i = 0 ;
xin = 0 ;
# 200 ;
forever begin
repeat(7) @(negedge clk) ; //空置7个周期,第8个周期给数据
en = 1 ;
xin = stimulus[i] ;
@(negedge clk) ;
en = 0 ; //输入数据有效信号只持续一个周期即可
if (i == SIN_DATA_NUM-1) i = 0 ;
else i = i + 1 ;
end
end
fir_serial u_fir_serial (
.clk (clk),
.rstn (rst_n),
.en (en),
.xin (xin),
.valid (valid),
.yout (yout));
endmodule
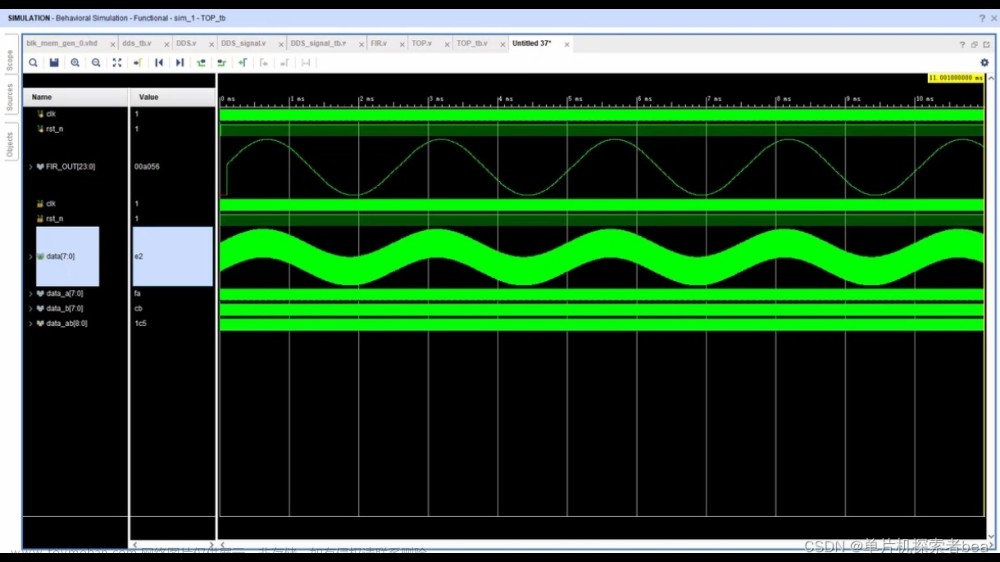
仿真结果
 文章来源地址https://www.toymoban.com/news/detail-673323.html
文章来源地址https://www.toymoban.com/news/detail-673323.html
到了这里,关于串行FIR滤波器的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!