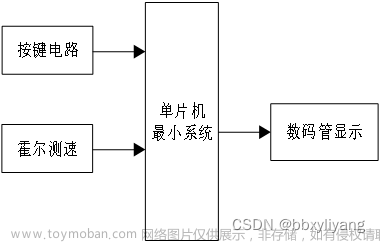
通过FPGA开发板上的NIOS Ⅱ搭建电机控制的硬件平台,包括电机正反转、编码器的读取,再通过软件部分实现PID算法对电机速度进行控制,使其能够渐近设定的编码器目标值。
一、问题与改进
SOPC之NIOS Ⅱ实现电机转速PID控制_STATEABC的博客-CSDN博客
在前面用PID实现了基于NIOS Ⅱ的电机转动控制,但是由于用的usleep()函数精度不够,所以会导致有时读取的编码器值不准确,最终发生PID产生振荡现象。
因此采用中断函数的方式,每10ms调用一次中断服务函数,再中断函数中实现PID控制,从而达到更大的精确度,减少振荡。
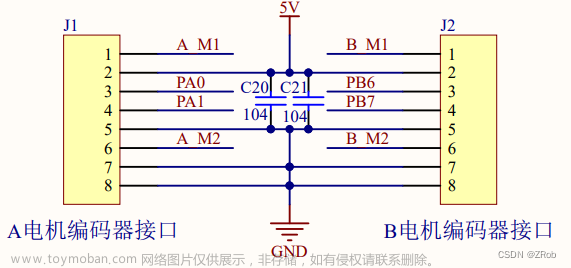
二、硬件设计
硬件设计同之前不变
 文章来源:https://www.toymoban.com/news/detail-673583.html
文章来源:https://www.toymoban.com/news/detail-673583.html
三、软件设计
3.1 中断函数初始化
void MPU_INT_INIT(void)
{
IOWR_ALTERA_AVALON_PIO_EDGE_CAP(MPU_INT_BASE,0x00);
#ifdef ALT_ENHANCED_INTERRUPT_API_PRESENT
if ((alt_ic_isr_register(MPU_INT_IRQ_INTERRUPT_CONTROLLER_ID,
MPU_INT_IRQ,
MPU_INT_ISR,
NULL,
NULL
)!= 0))
#else
if((alt_irq_register(MPU_INT_IRQ,NULL, MPU_INT_ISR )!= 0))
#endif
{
printf("register irt failed\r\n");
}
IOWR_ALTERA_AVALON_PIO_IRQ_MASK(MPU_INT_BASE,0x01);
}3.2 中断函数
#ifdef ALT_ENHANCED_INTERRUPT_API_PRESENT //nios2 91 edition or later
void MPU_INT_ISR(void *contex)
#else //before nios2 91 edition
void MPU_INT_ISR(void * contex, alt_u32 id)
#endif
{
if(!IORD_ALTERA_AVALON_PIO_EDGE_CAP(MPU_INT_BASE)){
return;
}else
{
IOWR_ALTERA_AVALON_PIO_EDGE_CAP(MPU_INT_BASE,0x00);
IOWR_ALTERA_AVALON_PIO_IRQ_MASK(MPU_INT_BASE,0x00);
// 测量当前编码器计数
//Car.Get_Encode();
//int currentCountsL = Car.Encode_L;
//int currentCountsR = abs(Car.Encode_R);
// 执行插值步骤
for (int currentstep = 0; currentstep < step; currentstep++) {
Car.Get_Encode();
int currentCountsL = Car.Encode_L;
interpolatedTarget= currentCountsL + (targetDistance - currentCountsL) * currentstep / step;
/* if(interpolatedTarget<=currentCountsL){
interpolatedTarget= currentCountsL + (targetDistance - currentCountsL) * currentstep / step;
}*/
// 计算误差
error = interpolatedTarget - currentCountsL;
// 计算 PID 控制输出
float controlOutput = calculatePID(error, integral, prev_error);
// 将控制输出限制在电机速度范围内
float speed = initialSpeed + controlOutput;
speed = fmaxf(-100, fminf(speed, 100));
// 更新下次迭代的前一次误差和积分
prev_error = error;
integral += error;
if (integral > 8000) integral = 8000;
if (integral < -8000) integral = -8000;
Car.SetSpeed(speed, 0);
}
}
IOWR_ALTERA_AVALON_PIO_IRQ_MASK(MPU_INT_BASE,0x01);
}3.3 主程序
int main()
{
Car.Stop();
Car.Start();
MPU_INT_INIT();
while(1){
printf("Enter targetDistance");
scanf("%d", &targetDistance);
}
return 0;
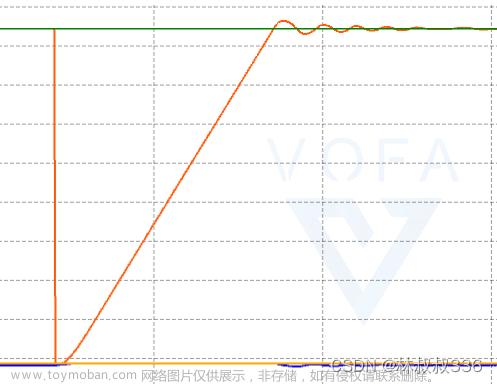
}四、实验结果
每10ms调用一次中断函数,这样也就保证了采样的精度,结果也比之前好了很多,但是还是会有稍微的振荡现象。文章来源地址https://www.toymoban.com/news/detail-673583.html
到了这里,关于SOPC之NIOS Ⅱ实现电机转速PID控制(调用中断函数)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!