Verilog 实现超声波测距
教学视频: https://www.bilibili.com/video/BV1Ve411x75W?p=33&spm_id_from=pageDriver&vd_source=19ae31dff4056e52d2729a4ca212602b
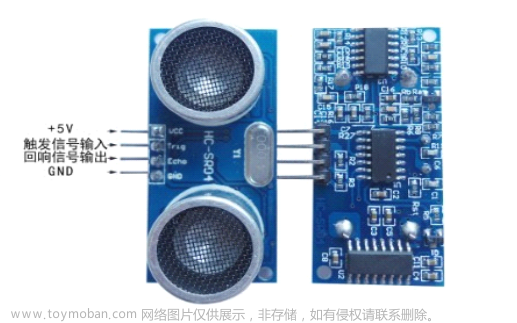
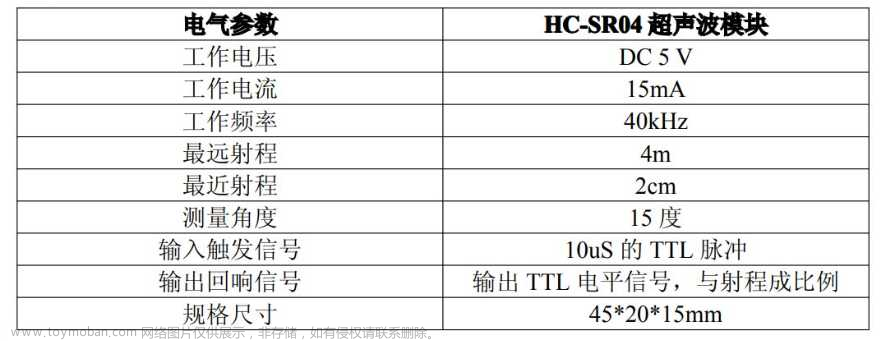
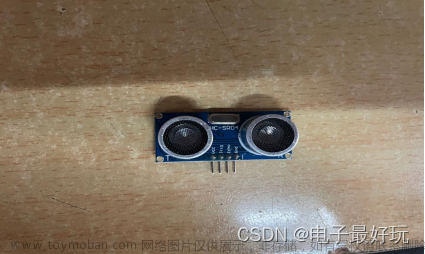
超声波测距原理
参考资料:STM32的超声波测距程序_超声波测距stm32程序_VaderZhang的博客-CSDN博客
推荐一波自己的文章:STM32蓝牙控制循迹避障小车源代码——3.舵机、超声波测距模块_stem32超声波舵机代码_灵风_Brend的博客-CSDN博客
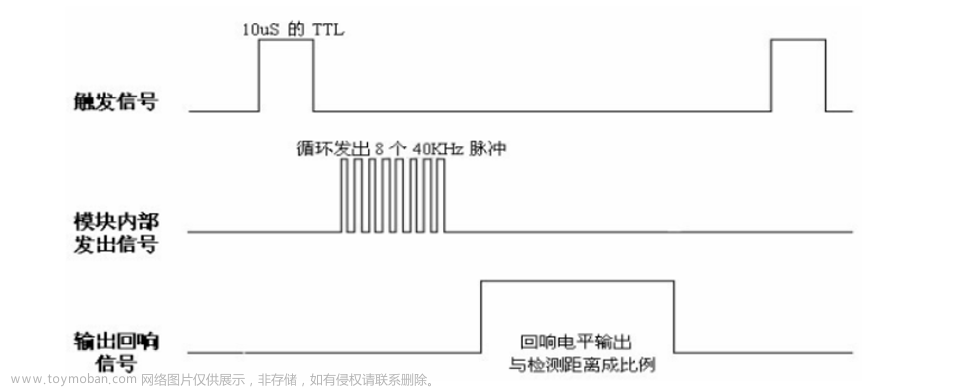
- 超声波模块工作原理:
输出TRIG触发测距,需要给最少10us的高电平信呈;
模块自动发送8个40KHZ的方波,自动检测是否有信号返回;
有信号返回,通过IO口ECHO输出高电平,高电平持续时间就是超声波从发射到返回的时间;
测试距离=高电平持续时间*声速/2
需求分析与功能定义:
- 每隔100ms时间,定时产生10us时间的TRIG高脉冲给到超声波测距模块,用于触发超声波测距模块工作
- 采集回响信号ECHO的高脉冲保持时间
- 将ECHO高脉冲保持时间换算成距离信息:s = 0.173*t
- 人机交互
代码思路:(详细教学可以看最上面的链接)
代码组成:

vlg_en :输出clk_en信号,对输入时钟clk做分频计数,产生1us的时钟使能信号(计数单位为us)
module vlg_en #(
parameter P_CLK_PERIORD = 20 //clk的时钟周期为20ms
)
(
input clk,
input rst_n,
output reg clk_en
);
localparam P_DIVCLK_MAX = 1000/P_CLK_PERIORD - 1; //分频计数器的最大值
reg [7:0] r_divcnt;
///
//对输入时钟clk做分频计数,产生1us的时钟使能信号
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
r_divcnt <= 8'b0;
else if(r_divcnt < P_DIVCLK_MAX)
r_divcnt <= r_divcnt + 1'b1;
else
r_divcnt <= 8'b0;
end
///
//产生时钟使能信号
always @(posedge clk) begin
if(r_divcnt == P_DIVCLK_MAX)
clk_en <= 1'b1;
else
clk_en <= 1'b0;
end
endmodule
vlg_tirg :每隔100ms时间,定时产生10us时间的TRIG高脉冲给到超声波测距模块,用于触发超声波测距模块工作
module vlg_tirg
(
input clk,
input rst_n,
input clk_en,
output reg trig
);
localparam P_TRIG_PERIORD_MAX = 100_000 - 1; //100ms计数最大值
localparam P_TRIG_HIGH_MAX = 10; //10us高脉冲保持时间
reg [16:0] tricnt;
///
//100ms周期计数
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
tricnt <= 'b0;
else if(clk_en)begin
if(tricnt < P_TRIG_PERIORD_MAX)
tricnt <= tricnt + 1'b1;
else
tricnt <= 'b0;
end
end
///
//产生保持10us的trig信号
always @(posedge clk) begin
if((tricnt > 'b0)&&(tricnt <= P_TRIG_HIGH_MAX))
trig <= 1'b1;
else
trig <= 1'b0;
end
endmodule
上面两个信号的波形展示:

vlg_echo : 采集回响信号ECHO的高脉冲保持时间。(echo信号的高电平保持时间即为超声波往返的时间)
module vlg_echo
(
input clk,
input rst_n,
input clk_en,
input echo,
output reg [15:0] t_us
);
reg [1:0] r_echo;
wire pos_echo,neg_echo;
reg cnt_en;
reg [15:0] echo_cnt;
///
//对echo信号锁存两拍,获取边沿检测信号,产生计数使能信号cnt_en
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
r_echo <= 'b0;
else
r_echo <= {r_echo[0],echo}; //高位锁存,低位移位
end
assign pos_echo = ~r_echo[1] & r_echo[0];
assign neg_echo = r_echo[1] & ~r_echo[0];
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
cnt_en <= 'b0;
else if(pos_echo)
cnt_en <= 1'b1;
else if(neg_echo)
cnt_en <= 1'b0;
else ;
end
///
//对echo信号的高电平保持时间进行1us为单位的计数
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
echo_cnt <= 'b0;
else if(!cnt_en)
echo_cnt <= 'b0;
else if(clk_en)
echo_cnt <= echo_cnt + 1'b1;
else ;
end
///
//对echo_cnt计数最大值做锁存
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
t_us <= 'b0;
else if(neg_echo)
t_us <= echo_cnt;
end
endmodule
cal :将时间计算为距离。测试距离=高电平持续时间 * 声速/2。 (s = 0.173*t)
module cal
(
input clk,
input rst_n,
input [15:0] t_us,
output [14:0] s_mm
);
/* s=0.173*t
s*4096=0.173*t*4096=709*t 避免小数部分
s=709*t/4096=709*t>>12
709实现方法: 1)乘法器
2)709=512+128+64+4+1
本代码使用乘法器来实现。直接调用乘法器IP核
*/
wire [25:0] mult_result;
mult_gen_0 u_mult_gen_0 (
.CLK(clk), // input wire CLK
.A(10'd709), // input wire [9 : 0] A
.B(t_us), // input wire [15 : 0] B
.P(mult_result) // output wire [25 : 0] P
);
assign s_mm = mult_result[25:12];
endmodule
顶层文件 vlg_top
module vlg_top(
input clk,
input rst_n,
output trig
);
localparam P_CLK_PERIORD = 20;
//接口声明
reg clk;
reg rst_n;
reg echo;
wire clk_en;
wire trig;
wire [15:0] t_us;
wire [14:0] s_mm;
//使能时钟产生模块
vlg_en #(
.P_CLK_PERIORD (P_CLK_PERIORD) //clk的时钟周期为20ns
)
u_vlg_en(
.clk (clk),
.rst_n (rst_n),
.clk_en (clk_en)
);
//产生触发信号trig
vlg_tirg u_vlg_tirg(
.clk (clk),
.rst_n (rst_n),
.clk_en (clk_en),
.trig (trig)
);
//测距模块的回响信号echo的高电平采集时间
vlg_echo u_vlg_echo(
.clk (clk),
.rst_n (rst_n),
.clk_en (clk_en),
.echo (echo),
.t_us (t_us)
);
//乘法器,计算距离
cal u_cal(
.clk (clk),
.rst_n (rst_n),
.t_us (t_us),
.s_mm (s_mm)
);
endmodule
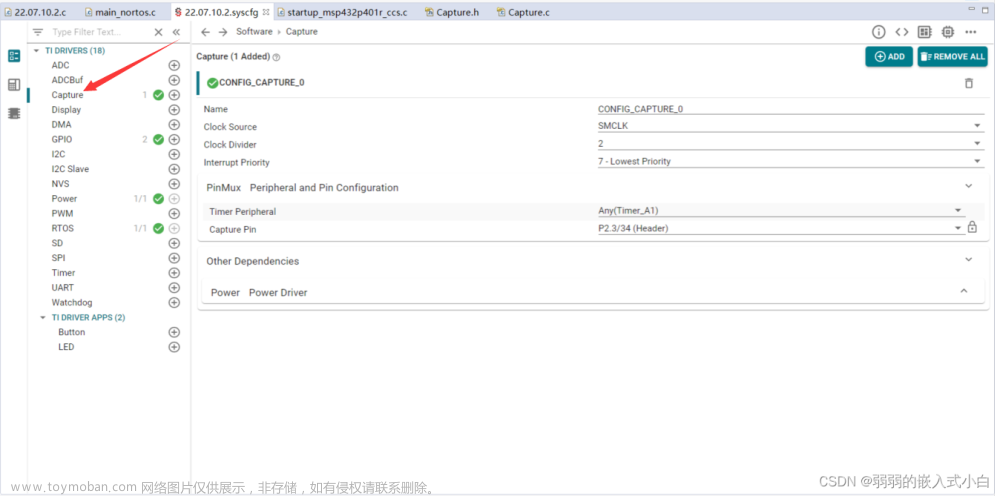
调用乘法器IP核
点击IP核,输入MUL,进行下面的操作:


TB文件
`timescale 1ns/1ps
module tb_top();
reg clk;
reg rst_n;
reg echo;
wire [14:0] s_mm;
vlg_top u_vlg_top(
.clk (clk),
.rst_n (rst_n),
.trig (trig)
);
//产生时钟
initial clk = 1;
always #10 clk = ~clk;
//测试激励产生
initial begin
rst_n = 0;
echo = 0;
#200;
rst_n = 1;
end
//函数实现 s=0.173*t
function real function_t2s;
input real t;
begin
function_t2s = 0.173*t;
end
endfunction
integer tricnt = 0;
integer dly_time;
always @(posedge trig)begin
tricnt = tricnt + 1;
#5000;
echo = 1;
dly_time = 11+{$random}%26011; //11<t<26011
#500;
$display("test %0d:\n dly_time=%0d us\n s=%0d mm\n",tricnt,dly_time,s_mm,function_t2s(dly_time));
#(dly_time*1000);
echo = 0;
end
endmodule
仿真结果
- 仿真波形
 文章来源:https://www.toymoban.com/news/detail-673690.html
文章来源:https://www.toymoban.com/news/detail-673690.html
- 结果
 文章来源地址https://www.toymoban.com/news/detail-673690.html
文章来源地址https://www.toymoban.com/news/detail-673690.html
到了这里,关于Verilog 实现超声波测距的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!