小白从零开始:STM32平铺式双闭环(速度环、位置环)电机控制(硬件篇)
小白从零开始:STM32双闭环(速度环、位置环)电机控制(软件篇)
前言
小白从零开始:小程序阿里云平台控制stm32(硬件篇)
杭州研究生手把手教你搞不定STM32
使用工具:
1.PCB设计: 立创EDA+嘉立创
2.硬件设备:风枪、焊台、烙铁、焊锡丝、焊带、直流稳压电源、3D打印机、万用表
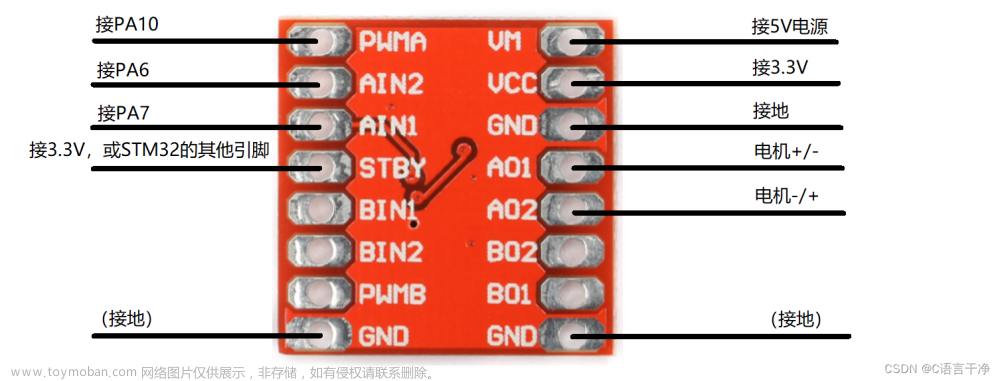
3.硬件外设:stm32f103c8t6主控+蓝牙通讯JDY-33+直流有刷带编码器电机N20+0.96OLED+驱动器L298N+上位机Android
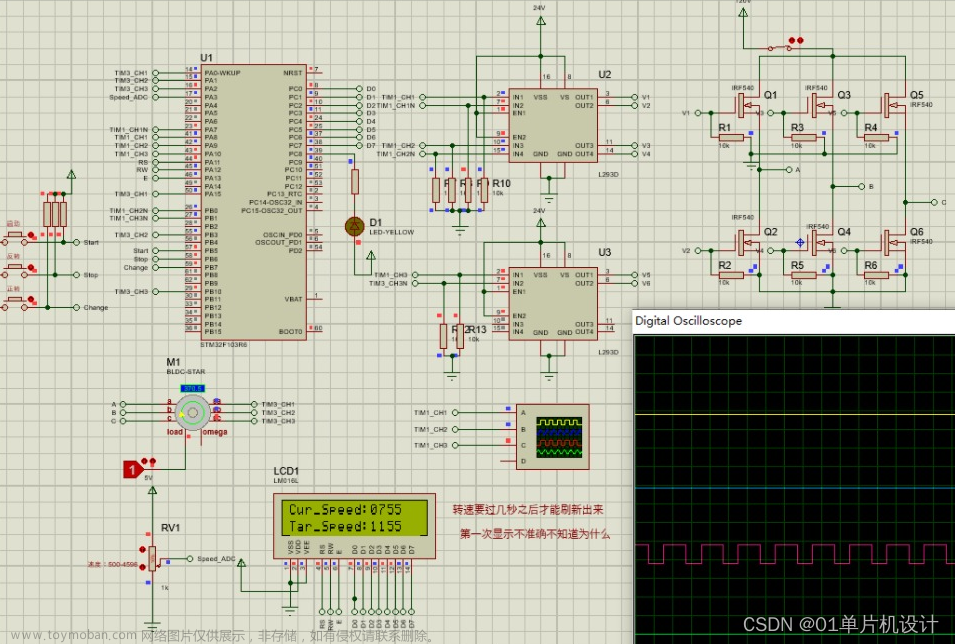
设计出来的总体是这样

提示:以下是本篇文章正文内容,下面案例可供参考
一、立创EDA(硬件设计)
1.主控STM32F103C8T6最小系统




2.蓝牙芯片JDY-33
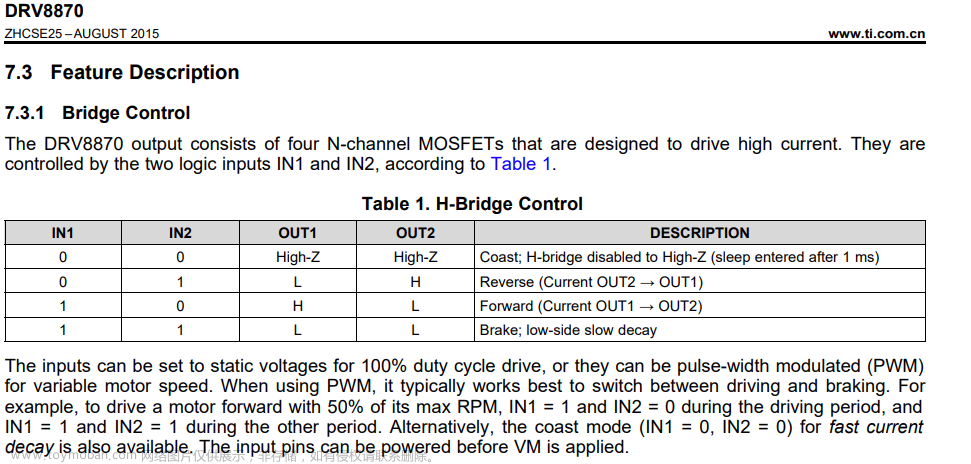
3.L298N
4.PCB正面
5.PCB反面
6.PCB-3D视角 文章来源:https://www.toymoban.com/news/detail-673938.html
文章来源:https://www.toymoban.com/news/detail-673938.html
总结
本文仅仅简单介绍了硬件方面,评论区欢迎讨论。文章来源地址https://www.toymoban.com/news/detail-673938.html
到了这里,关于【电机控制】小白从零开始:STM32双闭环(速度环、位置环)电机控制(硬件篇)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!