控制H桥输入信号来对有刷电机实现频繁正反转,一般有两种控制模式,模式一:H桥一路输入PWM信号,另一路输入高电平信号;模式二:H桥一路输入PWM信号,另一路输入低电平信号;两种模式下驱动电流存在较大差别。实测驱动电源电流模式一远大于模式二。
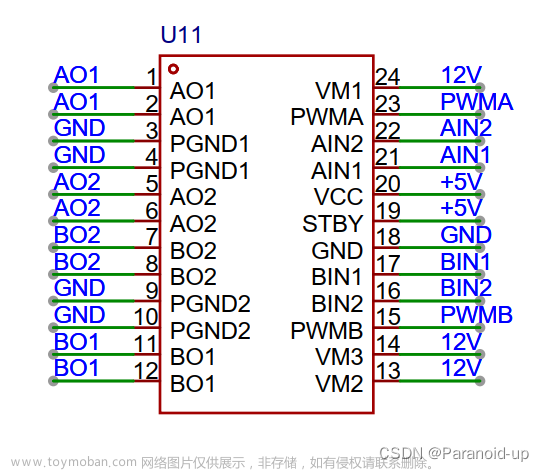
经查阅某款有刷电机驱动芯片H桥控制逻辑
当使用PWM 控制来实现调速功能时,H 桥可以操作在两种不同的状态,快衰减或者慢衰减。在快衰减模式,H 桥是被禁止的,续流电流流经体二极管;在慢衰减模式,输出H 桥的两个下管都是打开的。由此可知模式一为慢衰减模式,模式二为快衰减模式。
下图显示了在不同驱动和衰减模式下的电流通路。
经分析,当电机工作在正转时/快衰减模式时,xOUT1的上桥功率管为PWM信号,下桥功率管为低电平,xOUT2的上桥臂功率管为低电平,下桥功率为高电平,电机驱动电流路径为正向驱动①所示,当有刷电机处于快衰减模式进行制动时,H桥所有功率管都关闭,电机线圈中的电流只能由功率管寄生的二极管中流过,电机电感上的电流通过路径②流进供电电源以及消耗在二极管上,因此电流会逐渐减小,这种衰减方式在电机上表现为电机滑行。
当电机工作在正转/慢衰减模式时,正常驱动电流路径为正向驱动①所示,当有刷i电机处于慢衰减模式进行制动时,H桥的上下桥功率管关断,下桥功率管均打开,电机线圈中的电流流向为正向驱动③所示,电流慢慢减小,当电流减小到0时,由于惯性作用,电机仍然会继续正转,产生的反电动势会使电流反向流动,此时会产生制动转矩,使得电机快速停下,相对快衰减,电机电流上的电流衰减至0的速度更慢,因此称为慢衰减,但慢衰减模式会使得电机更快的停下来,这张衰减方式在电机行为表现上为电机制动。
由于我们选择的时慢衰减模式,直流电机电感上的电流衰减至0的速度更慢,工作在慢衰减模式时,需克服电机由于惯性产生的反向电流,在电机频繁正反过程中,因而驱动电流更大。
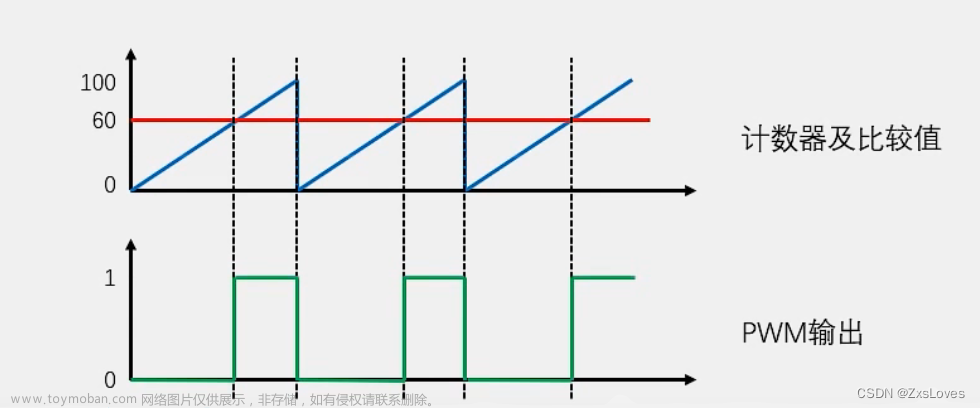
其实我们也可以这样分析,所谓快衰减和慢衰减是电机制动时电机线圈内电流的变化情况,在快衰减时,一路PWM,另一路低电平,我们可以看到当PWM占空比为低电平时,另一路也是低电平,也就对应着H桥控制逻辑表中的滑行,休眠功能,此时H桥四个管子关断;在慢衰减时,一路PWM,另一路高电平,我们可以看到当PWM占空比为高电平时,另一路也为高电平,这也就对应着H桥控制逻辑表的刹车功能,此时H桥两个下桥管子均导通,可以看作成有刷电机的正负极短接在一起,就会制动转矩。以上就是个人对有刷电机H桥工作模式进行的一个浅显分析,可能存在错误的地方,欢迎批评指正。文章来源地址https://www.toymoban.com/news/detail-674079.html
文章来源:https://www.toymoban.com/news/detail-674079.html
到了这里,关于直流电机的快衰减和慢衰减模式分析的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!