main.c
#include <stdio.h>
#include "wm_hal.h"
#include "rc522.h"
int main(void)
{
SystemClock_Config(CPU_CLK_160M);
printf("enter main\r\n");
HAL_Init();
RC522_Init();
PcdReset();
M500PcdConfigISOType ( 'A' );//设置工作方式
IC_test();
return 0;
}
rc522.c
#include "rc522.h"
#define macRC522_DELAY() SPI_Delay_Us(160,200)
/*
* 函数名:SPI_RC522_SendByte
* 描述 :向RC522发送1 Byte 数据
* 输入 :byte,要发送的数据
* 返回 : RC522返回的数据
* 调用 :内部调用
*/
void SPI_RC522_SendByte ( unsigned char byte )
{
unsigned char counter;
for(counter=0;counter<8;counter++)
{
if ( byte & 0x80 )
MOSI_H();
else
MOSI_L();
// SPI_Delay_Us(160, 3 );
macRC522_DELAY();
SCK_L ();
// SPI_Delay_Us(160, 1 );
// SPI_Delay_Us(160, 3 );
macRC522_DELAY();
SCK_H();
// SPI_Delay_Us(160, 3 );
macRC522_DELAY();
byte <<= 1;
}
}
/*
* 函数名:SPI_RC522_ReadByte
* 描述 :从RC522发送1 Byte 数据
* 输入 :无
* 返回 : RC522返回的数据
* 调用 :内部调用
*/
unsigned char SPI_RC522_ReadByte ( void )
{
unsigned char counter;
unsigned char SPI_Data=0;
for(counter=0;counter<8;counter++)
{
SPI_Data <<= 1;
SCK_L ();
// SPI_Delay_Us(160, 3 );
macRC522_DELAY();
if ( MISO() == 1)
SPI_Data |= 0x01;
// SPI_Delay_Us(160, 2 );
// SPI_Delay_Us(160, 3 );
macRC522_DELAY();
SCK_H ();
// SPI_Delay_Us(160, 3 );
macRC522_DELAY();
}
return SPI_Data;
}
/*
* 函数名:ReadRawRC
* 描述 :读RC522寄存器
* 输入 :ucAddress,寄存器地址
* 返回 : 寄存器的当前值
* 调用 :内部调用
*/
unsigned char ReadRawRC ( unsigned char ucAddress )
{
unsigned char ucAddr, ucReturn;
ucAddr = ( ( ucAddress << 1 ) & 0x7E ) | 0x80;
NSS_L();
SPI_RC522_SendByte ( ucAddr );
ucReturn = SPI_RC522_ReadByte ();
NSS_H();
return ucReturn;
}
/*
* 函数名:WriteRawRC
* 描述 :写RC522寄存器
* 输入 :ucAddress,寄存器地址
* ucValue,写入寄存器的值
* 返回 : 无
* 调用 :内部调用
*/
void WriteRawRC ( unsigned char ucAddress, unsigned char ucValue )
{
unsigned char ucAddr;
ucAddr = ( ucAddress << 1 ) & 0x7E;
NSS_L();
SPI_RC522_SendByte ( ucAddr );
SPI_RC522_SendByte ( ucValue );
NSS_H();
}
/*
* 函数名:SetBitMask
* 描述 :对RC522寄存器置位
* 输入 :ucReg,寄存器地址
* ucMask,置位值
* 返回 : 无
* 调用 :内部调用
*/
void SetBitMask ( unsigned char ucReg, unsigned char ucMask )
{
unsigned char ucTemp;
ucTemp = ReadRawRC ( ucReg );
WriteRawRC ( ucReg, ucTemp | ucMask ); // set bit mask
}
/*
* 函数名:ClearBitMask
* 描述 :对RC522寄存器清位
* 输入 :ucReg,寄存器地址
* ucMask,清位值
* 返回 : 无
* 调用 :内部调用
*/
void ClearBitMask ( unsigned char ucReg, unsigned char ucMask )
{
unsigned char ucTemp;
ucTemp = ReadRawRC ( ucReg );
WriteRawRC ( ucReg, ucTemp & ( ~ ucMask) ); // clear bit mask
}
/*
* 函数名:PcdAntennaOn
* 描述 :开启天线
* 输入 :无
* 返回 : 无
* 调用 :内部调用
*/
void PcdAntennaOn ( void )
{
unsigned char uc;
uc = ReadRawRC ( TxControlReg );
if ( ! ( uc & 0x03 ) )
SetBitMask(TxControlReg, 0x03);
}
/*
* 函数名:PcdAntennaOff
* 描述 :开启天线
* 输入 :无
* 返回 : 无
* 调用 :内部调用
*/
void PcdAntennaOff ( void )
{
ClearBitMask ( TxControlReg, 0x03 );
}
/*
* 函数名:PcdRese
* 描述 :复位RC522
* 输入 :无
* 返回 : 无
* 调用 :外部调用
*/
void PcdReset ( void )
{
RST_H();
SPI_Delay_Us(160, 1 );
RST_L();
SPI_Delay_Us(160, 1 );
RST_H();
SPI_Delay_Us(160, 1 );
WriteRawRC ( CommandReg, 0x0f );
while ( ReadRawRC ( CommandReg ) & 0x10 );
SPI_Delay_Us(160, 1 );
WriteRawRC ( ModeReg, 0x3D ); //定义发送和接收常用模式 和Mifare卡通讯,CRC初始值0x6363
WriteRawRC ( TReloadRegL, 30 ); //16位定时器低位
WriteRawRC ( TReloadRegH, 0 ); //16位定时器高位
WriteRawRC ( TModeReg, 0x8D ); //定义内部定时器的设置
WriteRawRC ( TPrescalerReg, 0x3E ); //设置定时器分频系数
WriteRawRC ( TxAutoReg, 0x40 ); //调制发送信号为100%ASK
}
/*
* 函数名:M500PcdConfigISOType
* 描述 :设置RC522的工作方式
* 输入 :ucType,工作方式
* 返回 : 无
* 调用 :外部调用
*/
void M500PcdConfigISOType ( unsigned char ucType )
{
if ( ucType == 'A') //ISO14443_A
{
ClearBitMask ( Status2Reg, 0x08 );
WriteRawRC ( ModeReg, 0x3D );//3F
WriteRawRC ( RxSelReg, 0x86 );//84
WriteRawRC( RFCfgReg, 0x7F ); //4F
WriteRawRC( TReloadRegL, 30 );//tmoLength);// TReloadVal = 'h6a =tmoLength(dec)
WriteRawRC ( TReloadRegH, 0 );
WriteRawRC ( TModeReg, 0x8D );
WriteRawRC ( TPrescalerReg, 0x3E );
SPI_Delay_Us(160, 2 );
PcdAntennaOn ();//开天线
}
}
/*
* 函数名:PcdComMF522
* 描述 :通过RC522和ISO14443卡通讯
* 输入 :ucCommand,RC522命令字
* pInData,通过RC522发送到卡片的数据
* ucInLenByte,发送数据的字节长度
* pOutData,接收到的卡片返回数据
* pOutLenBit,返回数据的位长度
* 返回 : 状态值
* = MI_OK,成功
* 调用 :内部调用
*/
char PcdComMF522 ( unsigned char ucCommand, unsigned char * pInData, unsigned char ucInLenByte, unsigned char * pOutData, unsigned long * pOutLenBit )
{
char cStatus = MI_ERR;
unsigned char ucIrqEn = 0x00;
unsigned char ucWaitFor = 0x00;
unsigned char ucLastBits;
unsigned char ucN;
unsigned long ul;
switch ( ucCommand )
{
case PCD_AUTHENT: //Mifare认证
ucIrqEn = 0x12; //允许错误中断请求ErrIEn 允许空闲中断IdleIEn
ucWaitFor = 0x10; //认证寻卡等待时候 查询空闲中断标志位
break;
case PCD_TRANSCEIVE: //接收发送 发送接收
ucIrqEn = 0x77; //允许TxIEn RxIEn IdleIEn LoAlertIEn ErrIEn TimerIEn
ucWaitFor = 0x30; //寻卡等待时候 查询接收中断标志位与 空闲中断标志位
break;
default:
break;
}
WriteRawRC ( ComIEnReg, ucIrqEn | 0x80 ); //IRqInv置位管脚IRQ与Status1Reg的IRq位的值相反
ClearBitMask ( ComIrqReg, 0x80 ); //Set1该位清零时,CommIRqReg的屏蔽位清零
WriteRawRC ( CommandReg, PCD_IDLE ); //写空闲命令
SetBitMask ( FIFOLevelReg, 0x80 ); //置位FlushBuffer清除内部FIFO的读和写指针以及ErrReg的BufferOvfl标志位被清除
for ( ul = 0; ul < ucInLenByte; ul ++ )
WriteRawRC ( FIFODataReg, pInData [ ul ] ); //写数据进FIFOdata
WriteRawRC ( CommandReg, ucCommand ); //写命令
if ( ucCommand == PCD_TRANSCEIVE )
SetBitMask(BitFramingReg,0x80); //StartSend置位启动数据发送 该位与收发命令使用时才有效
ul = 1000;//根据时钟频率调整,操作M1卡最大等待时间25ms
do //认证 与寻卡等待时间
{
ucN = ReadRawRC ( ComIrqReg ); //查询事件中断
ul --;
} while ( ( ul != 0 ) && ( ! ( ucN & 0x01 ) ) && ( ! ( ucN & ucWaitFor ) ) ); //退出条件i=0,定时器中断,与写空闲命令
ClearBitMask ( BitFramingReg, 0x80 ); //清理允许StartSend位
if ( ul != 0 )
{
if ( ! ( ReadRawRC ( ErrorReg ) & 0x1B ) ) //读错误标志寄存器BufferOfI CollErr ParityErr ProtocolErr
{
cStatus = MI_OK;
if ( ucN & ucIrqEn & 0x01 ) //是否发生定时器中断
cStatus = MI_NOTAGERR;
if ( ucCommand == PCD_TRANSCEIVE )
{
ucN = ReadRawRC ( FIFOLevelReg ); //读FIFO中保存的字节数
ucLastBits = ReadRawRC ( ControlReg ) & 0x07; //最后接收到得字节的有效位数
if ( ucLastBits )
* pOutLenBit = ( ucN - 1 ) * 8 + ucLastBits; //N个字节数减去1(最后一个字节)+最后一位的位数 读取到的数据总位数
else
* pOutLenBit = ucN * 8; //最后接收到的字节整个字节有效
if ( ucN == 0 )
ucN = 1;
if ( ucN > MAXRLEN )
ucN = MAXRLEN;
for ( ul = 0; ul < ucN; ul ++ )
pOutData [ ul ] = ReadRawRC ( FIFODataReg );
}
}
else
cStatus = MI_ERR;
}
SetBitMask ( ControlReg, 0x80 ); // stop timer now
WriteRawRC ( CommandReg, PCD_IDLE );
return cStatus;
}
/*
* 函数名:PcdRequest
* 描述 :寻卡
* 输入 :ucReq_code,寻卡方式
* = 0x52,寻感应区内所有符合14443A标准的卡
* = 0x26,寻未进入休眠状态的卡
* pTagType,卡片类型代码
* = 0x4400,Mifare_UltraLight
* = 0x0400,Mifare_One(S50)
* = 0x0200,Mifare_One(S70)
* = 0x0800,Mifare_Pro(X))
* = 0x4403,Mifare_DESFire
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdRequest ( unsigned char ucReq_code, unsigned char * pTagType )
{
char cStatus;
unsigned char ucComMF522Buf [ MAXRLEN ];
unsigned long ulLen;
ClearBitMask ( Status2Reg, 0x08 ); //清理指示MIFARECyptol单元接通以及所有卡的数据通信被加密的情况
WriteRawRC ( BitFramingReg, 0x07 ); // 发送的最后一个字节的 七位
SetBitMask ( TxControlReg, 0x03 ); //TX1,TX2管脚的输出信号传递经发送调制的13.56的能量载波信号
ucComMF522Buf [ 0 ] = ucReq_code; //存入 卡片命令字
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 1, ucComMF522Buf, & ulLen ); //寻卡
if ( ( cStatus == MI_OK ) && ( ulLen == 0x10 ) ) //寻卡成功返回卡类型
{
* pTagType = ucComMF522Buf [ 0 ];
* ( pTagType + 1 ) = ucComMF522Buf [ 1 ];
}
else
cStatus = MI_ERR;
return cStatus;
}
/*
* 函数名:PcdAnticoll
* 描述 :防冲撞
* 输入 :pSnr,卡片序列号,4字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdAnticoll ( unsigned char * pSnr )
{
char cStatus;
unsigned char uc, ucSnr_check = 0;
unsigned char ucComMF522Buf [ MAXRLEN ];
unsigned long ulLen;
ClearBitMask ( Status2Reg, 0x08 ); //清MFCryptol On位 只有成功执行MFAuthent命令后,该位才能置位
WriteRawRC ( BitFramingReg, 0x00); //清理寄存器 停止收发
ClearBitMask ( CollReg, 0x80 ); //清ValuesAfterColl所有接收的位在冲突后被清除
ucComMF522Buf [ 0 ] = 0x93; //卡片防冲突命令
ucComMF522Buf [ 1 ] = 0x20;
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 2, ucComMF522Buf, & ulLen);//与卡片通信
if ( cStatus == MI_OK) //通信成功
{
for ( uc = 0; uc < 4; uc ++ )
{
* ( pSnr + uc ) = ucComMF522Buf [ uc ]; //读出UID
ucSnr_check ^= ucComMF522Buf [ uc ];
}
if ( ucSnr_check != ucComMF522Buf [ uc ] )
cStatus = MI_ERR;
}
SetBitMask ( CollReg, 0x80 );
return cStatus;
}
/*
* 函数名:CalulateCRC
* 描述 :用RC522计算CRC16
* 输入 :pIndata,计算CRC16的数组
* ucLen,计算CRC16的数组字节长度
* pOutData,存放计算结果存放的首地址
* 返回 : 无
* 调用 :内部调用
*/
void CalulateCRC ( unsigned char * pIndata, unsigned char ucLen, unsigned char * pOutData )
{
unsigned char uc, ucN;
ClearBitMask(DivIrqReg,0x04);
WriteRawRC(CommandReg,PCD_IDLE);
SetBitMask(FIFOLevelReg,0x80);
for ( uc = 0; uc < ucLen; uc ++)
WriteRawRC ( FIFODataReg, * ( pIndata + uc ) );
WriteRawRC ( CommandReg, PCD_CALCCRC );
uc = 0xFF;
do
{
ucN = ReadRawRC ( DivIrqReg );
uc --;
} while ( ( uc != 0 ) && ! ( ucN & 0x04 ) );
pOutData [ 0 ] = ReadRawRC ( CRCResultRegL );
pOutData [ 1 ] = ReadRawRC ( CRCResultRegM );
}
/*
* 函数名:PcdSelect
* 描述 :选定卡片
* 输入 :pSnr,卡片序列号,4字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdSelect ( unsigned char * pSnr )
{
char ucN;
unsigned char uc;
unsigned char ucComMF522Buf [ MAXRLEN ];
unsigned long ulLen;
ucComMF522Buf [ 0 ] = PICC_ANTICOLL1;
ucComMF522Buf [ 1 ] = 0x70;
ucComMF522Buf [ 6 ] = 0;
for ( uc = 0; uc < 4; uc ++ )
{
ucComMF522Buf [ uc + 2 ] = * ( pSnr + uc );
ucComMF522Buf [ 6 ] ^= * ( pSnr + uc );
}
CalulateCRC ( ucComMF522Buf, 7, & ucComMF522Buf [ 7 ] );
ClearBitMask ( Status2Reg, 0x08 );
ucN = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 9, ucComMF522Buf, & ulLen );
if ( ( ucN == MI_OK ) && ( ulLen == 0x18 ) )
ucN = MI_OK;
else
ucN = MI_ERR;
return ucN;
}
/*
* 函数名:PcdAuthState
* 描述 :验证卡片密码
* 输入 :ucAuth_mode,密码验证模式
* = 0x60,验证A密钥
* = 0x61,验证B密钥
* unsigned char ucAddr,块地址
* pKey,密码
* pSnr,卡片序列号,4字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdAuthState ( unsigned char ucAuth_mode, unsigned char ucAddr, unsigned char * pKey, unsigned char * pSnr )
{
char cStatus;
unsigned char uc, ucComMF522Buf [ MAXRLEN ];
unsigned long ulLen;
ucComMF522Buf [ 0 ] = ucAuth_mode;
ucComMF522Buf [ 1 ] = ucAddr;
for ( uc = 0; uc < 6; uc ++ )
ucComMF522Buf [ uc + 2 ] = * ( pKey + uc );
for ( uc = 0; uc < 6; uc ++ )
ucComMF522Buf [ uc + 8 ] = * ( pSnr + uc );
cStatus = PcdComMF522 ( PCD_AUTHENT, ucComMF522Buf, 12, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ! ( ReadRawRC ( Status2Reg ) & 0x08 ) ) )
cStatus = MI_ERR;
return cStatus;
}
/*
* 函数名:PcdWrite
* 描述 :写数据到M1卡一块
* 输入 :unsigned char ucAddr,块地址
* pData,写入的数据,16字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdWrite ( unsigned char ucAddr, unsigned char * pData )
{
char cStatus;
unsigned char uc, ucComMF522Buf [ MAXRLEN ];
unsigned long ulLen;
ucComMF522Buf [ 0 ] = PICC_WRITE;
ucComMF522Buf [ 1 ] = ucAddr;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
if ( cStatus == MI_OK )
{
//memcpy(ucComMF522Buf, pData, 16);
for ( uc = 0; uc < 16; uc ++ )
ucComMF522Buf [ uc ] = * ( pData + uc );
CalulateCRC ( ucComMF522Buf, 16, & ucComMF522Buf [ 16 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 18, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
}
return cStatus;
}
/*
* 函数名:PcdRead
* 描述 :读取M1卡一块数据
* 输入 :unsigned char ucAddr,块地址
* pData,读出的数据,16字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdRead ( unsigned char ucAddr, unsigned char * pData )
{
char cStatus;
unsigned char uc, ucComMF522Buf [ MAXRLEN ];
unsigned long ulLen;
ucComMF522Buf [ 0 ] = PICC_READ;
ucComMF522Buf [ 1 ] = ucAddr;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
if ( ( cStatus == MI_OK ) && ( ulLen == 0x90 ) )
{
for ( uc = 0; uc < 16; uc ++ )
* ( pData + uc ) = ucComMF522Buf [ uc ];
}
else
cStatus = MI_ERR;
return cStatus;
}
/*
* 函数名:PcdHalt
* 描述 :命令卡片进入休眠状态
* 输入 :无
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdHalt( void )
{
unsigned char ucComMF522Buf [ MAXRLEN ];
unsigned long ulLen;
ucComMF522Buf [ 0 ] = PICC_HALT;
ucComMF522Buf [ 1 ] = 0;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
return MI_OK;
}
void IC_CMT ( unsigned char * UID, unsigned char * KEY, unsigned char RW, unsigned char * Dat )
{
unsigned char ucArray_ID [ 4 ] = { 0 };//先后存放IC卡的类型和UID(IC卡序列号)
PcdRequest ( 0x52, ucArray_ID );//寻卡
PcdAnticoll ( ucArray_ID );//防冲撞
PcdSelect ( UID );//选定卡
PcdAuthState ( 0x60, 0x10, KEY, UID );//校验
if ( RW )//读写选择,1是读,0是写
PcdRead ( 0x10, Dat );
else
PcdWrite ( 0x10, Dat );
PcdHalt ();
}
void RC522_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0}; //初始化GPIO结构体
__HAL_RCC_GPIO_CLK_ENABLE(); //打开GPIO时钟
GPIO_InitStruct.Pin = SPI_SCK_PIN | SPI_MOSI_PIN | SPI_MISO_PIN | SPI_NSS_PIN | SPI_RST_PIN; //配置引脚
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT; //配置成输出模式
GPIO_InitStruct.Pull = GPIO_NOPULL; //不拉
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); //引脚初始化
RST_H();
NSS_H();
}
void IC_test ( void )
{
unsigned char ucArray_ID [ 4 ]; //先后存放IC卡的类型和UID(IC卡序列号)
unsigned char ucStatusReturn; //返回状态
while ( 1 )
{
if ((ucStatusReturn = PcdRequest(PICC_REQALL,ucArray_ID)) != MI_OK ) //寻卡
ucStatusReturn = PcdRequest (PICC_REQALL,ucArray_ID); //若失败再次寻卡
if ( ucStatusReturn == MI_OK )
{
if ( PcdAnticoll (ucArray_ID) == MI_OK ) //防冲撞(当有多张卡进入读写器操作范围时,防冲突机制会从其中选择一张进行操作)
{
printf("id correct\r\n");
}
}
}
}
rc522.h
#include "spi_ctrl.h"
/
//MF522命令字
/
#define PCD_IDLE 0x00 //取消当前命令
#define PCD_AUTHENT 0x0E //验证密钥
#define PCD_RECEIVE 0x08 //接收数据
#define PCD_TRANSMIT 0x04 //发送数据
#define PCD_TRANSCEIVE 0x0C //发送并接收数据
#define PCD_RESETPHASE 0x0F //复位
#define PCD_CALCCRC 0x03 //CRC计算
/
//Mifare_One卡片命令字
/
#define PICC_REQIDL 0x26 //寻天线区内未进入休眠状态
#define PICC_REQALL 0x52 //寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 //防冲撞
#define PICC_ANTICOLL2 0x95 //防冲撞
#define PICC_AUTHENT1A 0x60 //验证A密钥
#define PICC_AUTHENT1B 0x61 //验证B密钥
#define PICC_READ 0x30 //读块
#define PICC_WRITE 0xA0 //写块
#define PICC_DECREMENT 0xC0 //扣款
#define PICC_INCREMENT 0xC1 //充值
#define PICC_RESTORE 0xC2 //调块数据到缓冲区
#define PICC_TRANSFER 0xB0 //保存缓冲区中数据
#define PICC_HALT 0x50 //休眠
/
//MF522 FIFO长度定义
/
#define DEF_FIFO_LENGTH 64 //FIFO size=64byte
#define MAXRLEN 18
/
//MF522寄存器定义
/
// PAGE 0
#define RFU00 0x00
#define CommandReg 0x01
#define ComIEnReg 0x02
#define DivlEnReg 0x03
#define ComIrqReg 0x04
#define DivIrqReg 0x05
#define ErrorReg 0x06
#define Status1Reg 0x07
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define WaterLevelReg 0x0B
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define RFU0F 0x0F
// PAGE 1
#define RFU10 0x10
#define ModeReg 0x11
#define TxModeReg 0x12
#define RxModeReg 0x13
#define TxControlReg 0x14
#define TxAutoReg 0x15
#define TxSelReg 0x16
#define RxSelReg 0x17
#define RxThresholdReg 0x18
#define DemodReg 0x19
#define RFU1A 0x1A
#define RFU1B 0x1B
#define MifareReg 0x1C
#define RFU1D 0x1D
#define RFU1E 0x1E
#define SerialSpeedReg 0x1F
// PAGE 2
#define RFU20 0x20
#define CRCResultRegM 0x21
#define CRCResultRegL 0x22
#define RFU23 0x23
#define ModWidthReg 0x24
#define RFU25 0x25
#define RFCfgReg 0x26
#define GsNReg 0x27
#define CWGsCfgReg 0x28
#define ModGsCfgReg 0x29
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegH 0x2C
#define TReloadRegL 0x2D
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F
// PAGE 3
#define RFU30 0x30
#define TestSel1Reg 0x31
#define TestSel2Reg 0x32
#define TestPinEnReg 0x33
#define TestPinValueReg 0x34
#define TestBusReg 0x35
#define AutoTestReg 0x36
#define VersionReg 0x37
#define AnalogTestReg 0x38
#define TestDAC1Reg 0x39
#define TestDAC2Reg 0x3A
#define TestADCReg 0x3B
#define RFU3C 0x3C
#define RFU3D 0x3D
#define RFU3E 0x3E
#define RFU3F 0x3F
/
//和MF522通讯时返回的错误代码
/
#define MI_OK 0x26
#define MI_NOTAGERR 0xcc
#define MI_ERR 0xbb
#define macDummy_Data 0x00
void PcdReset ( void ); //复位
void M500PcdConfigISOType ( unsigned char type ); //工作方式
char PcdRequest ( unsigned char req_code, unsigned char * pTagType ); //寻卡
char PcdAnticoll ( unsigned char * pSnr); //读卡号
/*********************************** 函数 *********************************************/
void RC522_Init(void);
void IC_test ( void );
spi_crtl.c
/**
* Copyright (c) 2022-2023£¬HelloAlpha
*
* Change Logs:
* Date Author Notes
*/
#include "spi_ctrl.h"
/* CPOL = 0, CPHA = 0, MSB first */
uint8_t SOFT_SPI_RW_MODE0(uint8_t write_dat)
{
uint8_t i, read_dat;
for( i = 0; i < 8; i++ )
{
if( write_dat & 0x80 )
MOSI_H();
else
MOSI_L();
write_dat <<= 1;
SPI_Delay_Us(160,1);
SCK_H();
read_dat <<= 1;
if( MISO() )
read_dat++;
SPI_Delay_Us(160,1);
SCK_L();
SPI_Delay_Us(160,1);
}
return read_dat;
}
/* CPOL=0£¬CPHA=1, MSB first */
uint8_t SOFT_SPI_RW_MODE1(uint8_t write_dat)
{
uint8_t i, read_dat;
for( i = 0; i < 8; i++ )
{
SCK_H();
if( write_dat & 0x80 )
MOSI_H();
else
MOSI_L();
write_dat <<= 1;
SPI_Delay_Us(160,100);
SCK_L();
read_dat <<= 1;
if(MISO())
read_dat++;
SPI_Delay_Us(160,100);
}
return read_dat;
}
/* CPOL=1£¬CPHA=0, MSB first */
uint8_t SOFT_SPI_RW_MODE2(uint8_t write_dat)
{
uint8_t i, read_dat;
for( i = 0; i < 8; i++ )
{
if( write_dat & 0x80 )
MOSI_H();
else
MOSI_L();
write_dat <<= 1;
SPI_Delay_Us(160,1);
SCK_L();
read_dat <<= 1;
if(MISO())
read_dat++;
SPI_Delay_Us(160,1);
SCK_H();
}
return read_dat;
}
/* CPOL = 1, CPHA = 1, MSB first */
uint8_t SOFT_SPI_RW_MODE3( uint8_t write_dat )
{
uint8_t i, read_dat;
for( i = 0; i < 8; i++ )
{
SCK_L();
if( write_dat & 0x80 )
MOSI_H();
else
MOSI_L();
write_dat <<= 1;
SPI_Delay_Us(160,1);
SCK_H();
read_dat <<= 1;
if( MISO() )
read_dat++;
SPI_Delay_Us(160,1);
}
return read_dat;
}
spi_crtl.h
/**
* Copyright (c) 2022-2023,HelloAlpha
*
* Change Logs:
* Date Author Notes
*/
#ifndef __SPI_CTRL_H__
#define __SPI_CTRL_H__
#include "spi_io.h"
#define SPI_START_COMMUNICATION NSS_L()
#define SPI_STOP_COMMUNICATION NSS_H()
/**
* CPOL 配置 SPI 总线的极性
* CPHA 配置 SPI 总线的相位
*
* 模式0:CPOL=0,CPHA =0 MSB first
* SCK空闲为低电平,数据在SCK的上升沿被采样(提取数据)
* 模式1:CPOL=0,CPHA =1 MSB first
* SCK空闲为低电平,数据在SCK的下降沿被采样(提取数据)
* 模式2:CPOL=1,CPHA =0 MSB first
* SCK空闲为高电平,数据在SCK的下降沿被采样(提取数据)
* 模式3:CPOL=1,CPHA =1 MSB first
* SCK空闲为高电平,数据在SCK的上升沿被采样(提取数据)
*/
/* CPOL = 0, CPHA = 0, MSB first*/
uint8_t SOFT_SPI_RW_MODE0(uint8_t write_dat);
/* CPOL=0,CPHA=1, MSB first */
uint8_t SOFT_SPI_RW_MODE1(uint8_t write_dat);
/* CPOL=1,CPHA=0, MSB first */
uint8_t SOFT_SPI_RW_MODE2(uint8_t write_dat);
/* CPOL = 1, CPHA = 1, MSB first */
uint8_t SOFT_SPI_RW_MODE3( uint8_t write_dat );
#endif
spi_io.c文章来源:https://www.toymoban.com/news/detail-674425.html
/**
* Copyright (c) 2022-2023£¬HelloAlpha
*
* Change Logs:
* Date Author Notes
*/
#include "spi_io.h"
static void SET_PIN_OUT(uint32_t PIN)
{
GPIO_InitTypeDef GPIO_InitStruct = {0}; //初始化GPIO结构体
__HAL_RCC_GPIO_CLK_ENABLE(); //打开GPIO时钟
GPIO_InitStruct.Pin = PIN; //配置引脚
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT; //配置成输出模式
GPIO_InitStruct.Pull = GPIO_NOPULL; //不拉
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); //引脚初始化
}
void MOSI_H(void)
{
SET_PIN_OUT(SPI_MOSI_PIN);
HAL_GPIO_WritePin(GPIOA, SPI_MOSI_PIN, GPIO_PIN_SET);
}
void MOSI_L(void)
{
SET_PIN_OUT(SPI_MOSI_PIN);
HAL_GPIO_WritePin(GPIOA, SPI_MOSI_PIN, GPIO_RESET);
}
void SCK_H(void)
{
SET_PIN_OUT(SPI_SCK_PIN);
HAL_GPIO_WritePin(GPIOA, SPI_SCK_PIN, GPIO_PIN_SET);
}
void SCK_L(void)
{
SET_PIN_OUT(SPI_SCK_PIN);
HAL_GPIO_WritePin(GPIOA, SPI_SCK_PIN, GPIO_RESET);
}
uint32_t MISO(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0}; //初始化GPIO结构体
__HAL_RCC_GPIO_CLK_ENABLE(); //打开GPIO时钟
GPIO_InitStruct.Pin = SPI_MISO_PIN; //配置引脚
GPIO_InitStruct.Mode = GPIO_MODE_INPUT; //配置成
GPIO_InitStruct.Pull = GPIO_NOPULL; //不拉
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); //引脚初始化
return HAL_GPIO_ReadPin(GPIOA, SPI_MISO_PIN);
}
void NSS_H(void)
{
SET_PIN_OUT(SPI_NSS_PIN);
HAL_GPIO_WritePin(GPIOA, SPI_NSS_PIN, GPIO_PIN_SET);
}
void NSS_L(void)
{
SET_PIN_OUT(SPI_NSS_PIN);
HAL_GPIO_WritePin(GPIOA, SPI_NSS_PIN, GPIO_RESET);
}
void RST_H(void)
{
SET_PIN_OUT(SPI_RST_PIN);
HAL_GPIO_WritePin(GPIOA, SPI_RST_PIN, GPIO_PIN_SET);
}
void RST_L(void)
{
SET_PIN_OUT(SPI_RST_PIN);
HAL_GPIO_WritePin(GPIOA, SPI_RST_PIN, GPIO_RESET);
}
void SPI_Delay_Us(uint8_t freq,uint32_t time)
{
uint32_t i;
uint16_t num = 90;
switch(freq)
{
case 240: num = 80;break;
case 160: num = 53;break;
default: printf("delay input freq err...default set 240MHZ us time \r\n ");break;
}
for (i = 0; i < (num)*time; i++)
{
__NOP();
}
}
void SPI_Delay_Ms(uint8_t freq,uint32_t time)
{
uint32_t i;
uint16_t num = 90;
switch(freq)
{
case 240: num = 80;break;
case 160: num = 53;break;
default: printf("delay input freq err...default set 240MHZ us time \r\n ");break;
}
for (i = 0; i < (num)*time*1000; i++)
{
__NOP();
}
}
spi_io.h文章来源地址https://www.toymoban.com/news/detail-674425.html
/**
* Copyright (c) 2022-2023£¬HelloAlpha
*
* Change Logs:
* Date Author Notes
*/
#include "wm_hal.h"
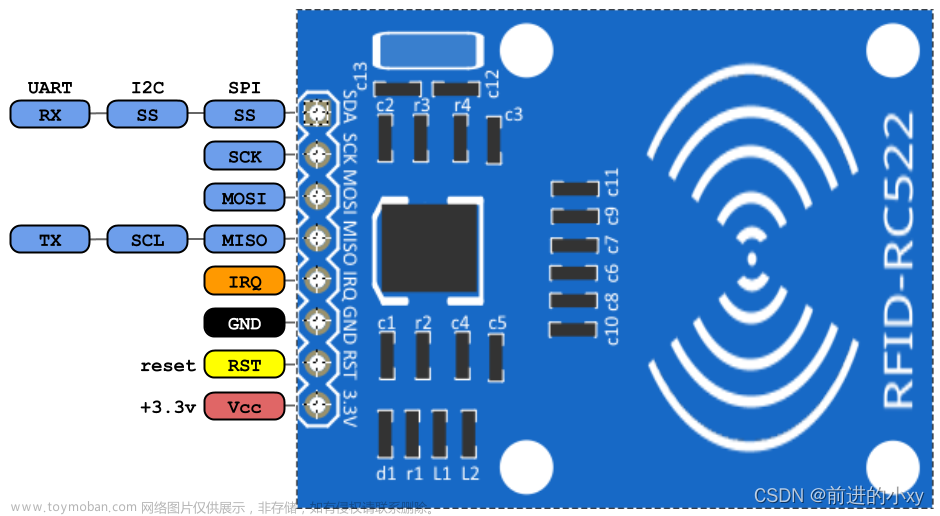
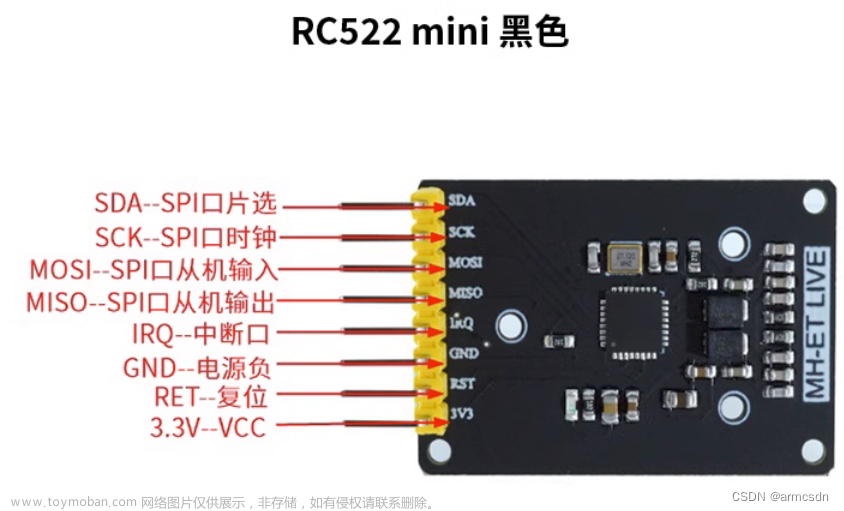
#define SPI_SCK_PIN GPIO_PIN_0 //SCL
#define SPI_MOSI_PIN GPIO_PIN_1 //MOSI
#define SPI_MISO_PIN GPIO_PIN_2 //MISO
#define SPI_NSS_PIN GPIO_PIN_3 //SDA
#define SPI_RST_PIN GPIO_PIN_4 //RST,可不接
#define GPIO_MODEL_INPUT 0
#define GPIO_MODEL_OUTPUT 1
#define GPIO_OUTPUT_DISABLE 0
#define GPIO_OUTPUT_ENABLE 1
#define GPIO_RESET 0
#define GPIO_SET 1
void MOSI_H(void);
void MOSI_L(void);
void SCK_H(void);
void SCK_L(void);
uint32_t MISO(void);
void NSS_H(void);
void NSS_L(void);
void RST_H(void);
void RST_L(void);
void SPI_Delay_Us(uint8_t freq,uint32_t time);
void SPI_Delay_Ms(uint8_t freq,uint32_t time);
到了这里,关于5-W806-RC522-SPI的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!