题目链接力扣
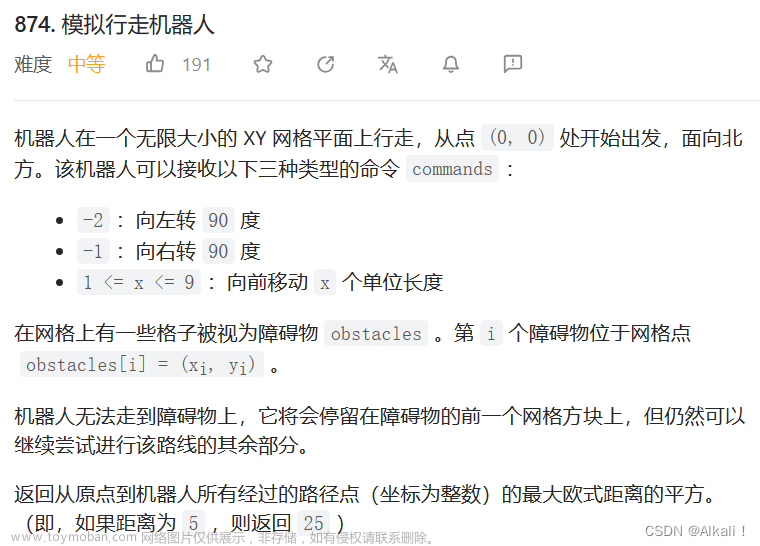
机器人在一个无限大小的 XY 网格平面上行走,从点 (0, 0) 处开始出发,面向北方。该机器人可以接收以下三种类型的命令 commands :
-
-2:向左转90度 -
-1:向右转90度 -
1 <= x <= 9:向前移动x个单位长度
在网格上有一些格子被视为障碍物 obstacles 。第 i 个障碍物位于网格点 obstacles[i] = (xi, yi) 。
机器人无法走到障碍物上,它将会停留在障碍物的前一个网格方块上,但仍然可以继续尝试进行该路线的其余部分。
返回从原点到机器人所有经过的路径点(坐标为整数)的最大欧式距离的平方。(即,如果距离为 5 ,则返回 25 )
注意:
- 北表示
+Y方向。 - 东表示
+X方向。 - 南表示
-Y方向。 - 西表示
-X方向。
示例 1:
输入:commands = [4,-1,3], obstacles = [] 输出:25 解释: 机器人开始位于 (0, 0): 1. 向北移动 4 个单位,到达 (0, 4) 2. 右转 3. 向东移动 3 个单位,到达 (3, 4) 距离原点最远的是 (3, 4) ,距离为 32 + 42 = 25
示例 2:
输入:commands = [4,-1,4,-2,4], obstacles = [[2,4]] 输出:65 解释:机器人开始位于 (0, 0): 1. 向北移动 4 个单位,到达 (0, 4) 2. 右转 3. 向东移动 1 个单位,然后被位于 (2, 4) 的障碍物阻挡,机器人停在 (1, 4) 4. 左转 5. 向北走 4 个单位,到达 (1, 8) 距离原点最远的是 (1, 8) ,距离为 12 + 82 = 65
思路
题目是一个模拟,用一个点表示 (x,y,direction) 分别表示点的横纵坐标和方向。由于有障碍物,每次移动时,每移动一步,就查看当前的(x,y)坐标是否有障碍物,如果有就停止。障碍物用哈希结构来保存。
typedef struct point{
int x ;
int y ;
int direction ; // 0 , 1, 2, 3 北,东,南,西
}Point;
int robotSim(vector<int>& commands, vector<vector<int>>& obstacles) {
// 初始化起点,方向
int dx[4] = {1,0,-1,0};
int dy[4] = {0,-1,0,1};
Point p ;
p.x = 0 ;
p.y = 0 ;
p.direction = 3 ;
// 用哈希记录 障碍物
set<pair<int,int>> vis ;
for(auto & i : obstacles){
vis.emplace(i[0],i[1]) ;
}
int ans = 0 ;
for(int i = 0 ; i<commands.size() ; i++ ){
if(commands[i] ==-2 ){
// 左转
p.direction= (p.direction-1+4)%4 ;
}else if (commands[i] ==-1){
// 右转
p.direction= (p.direction+1)%4 ;
}else{
int step = commands[i] ;
for(int i = 0 ; i<step; i++ ){
int nx = p.x +dx[p.direction] ;
int ny = p.y +dy[p.direction] ;
if(vis.count({nx,ny})) {
break ;
}
p.x = nx ;
p.y = ny ;
ans = max(ans , p.x*p.x +p.y*p.y);
}
}
}
return ans ;
}扩展
pair<int,int>的常用法
1. 创建
pair<int, int> myPair(3, 7);2. 获取pair<int, int>的第一个和第二个元素
pair<int, int> myPair(3, 7);
int firstElement = myPair.first; // 获取第一个元素,值为3
int secondElement = myPair.second; // 获取第二个元素,值为73. 修改pair<int, int>的值文章来源:https://www.toymoban.com/news/detail-674881.html
myPair.first = 10; // 修改第一个元素的值为10
myPair.second = 20; // 修改第二个元素的值为204. 使用pair<int, int>作为容器的元素:文章来源地址https://www.toymoban.com/news/detail-674881.html
vector<std::pair<int, int>> myVector;
myVector.push_back(std::make_pair(3, 7)); // 将一个pair<int, int>对象添加到vector中
map<std::string, std::pair<int, int>> myMap;
myMap["key"] = std::make_pair(3, 7); // 将一个pair<int, int>对象关联到一个字符串键上到了这里,关于874. 模拟行走机器人 模拟+哈希存储的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!