STM32中断方式实现串口通信(标准库)
- 主要任务:
1)当stm32接收到字符“s”时,停止持续发送“hello windows!”; 当接收到字符“t”时,持续发送“hello windows!”;
2)当stm32接收到字符“stop stm32!”时,停止持续发送“hello windows!”; 当接收到字符“go stm32!”时,持续发送“hello windows!”
实验工具:
(1)软件
标准库
KEIL5:[安装教程](https://blog.csdn.net/zhoushuaiyxlmwan/article/details/127190907?
spm=1001.2014.3001.5502)mcuisp(或者FlyMcu): mcuisp百度网盘链接提取码:h2xc
野火多功能调试助手:https://pan.baidu.com/s/14zEjYNlU-2CjgoR1sI5dSg 提取码:rau0
(2)硬件
- STM32F103C8T6的最小核心板
- 杜邦线
- USB转TTL模块
一.串口通信原理以及中断原理
这两部分我在上两篇文章里已经介绍过了,这里就不占用篇幅了
串口通信原理
中断原理
一.问题分析
1.涉及外设
1.串口通信:USART,GPIO
2.中断:GPIO,AFIO,EXTI,NVIC
2.状态机实现

图上的意思是:
设置一个状态标志位S,默认为0,等待包头的出现(这里的包头自己设置一个字符 )。
当检测到接收的一个字符和我们规定的包头字符相符合,就把标志位S置1,并且开始接收后面来的数据,直到读取到某一个字符和我们规定的第一位结束位相符合,则把标志位S置2,并且不再接收数据,只等待字符与第二个结束位相符合,把状态位S置0.
这里是双重结束标志置位,我们也可以设置一个结束标志位,这样就只需要S的值在0或1之间转换,原理不变
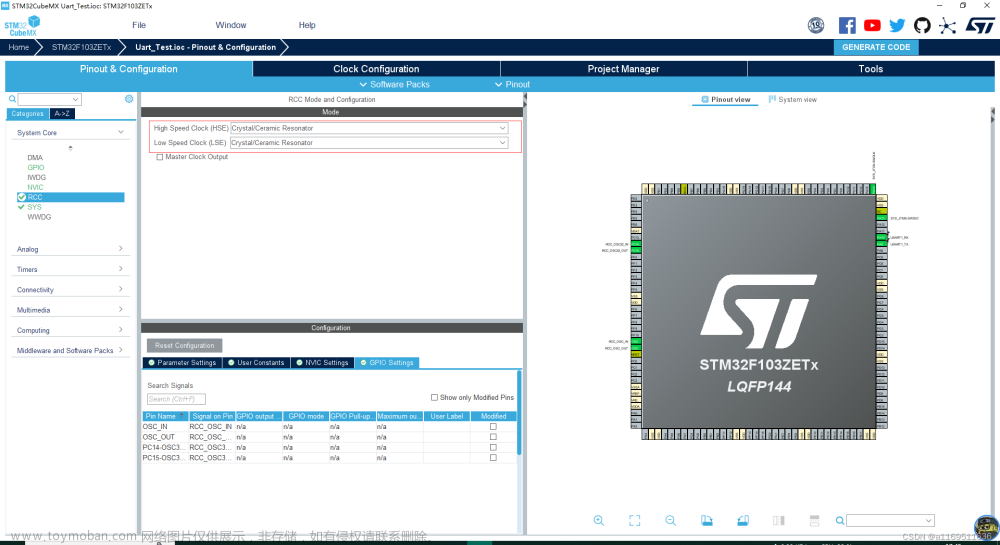
二.创建MDK(keil5)项目
1.项目结构

①.USER
存放main.c文件以及标准库的配置文件
②.Hardware
存放串口触发中断,以及利用串口通信的一些函数
③.Delay
存放供我们调用的延时函数,在后面用单片机循环发送消息时会用到
④.其他
都是其他对应的标准库的文件
2.基本设置


三.具体实现
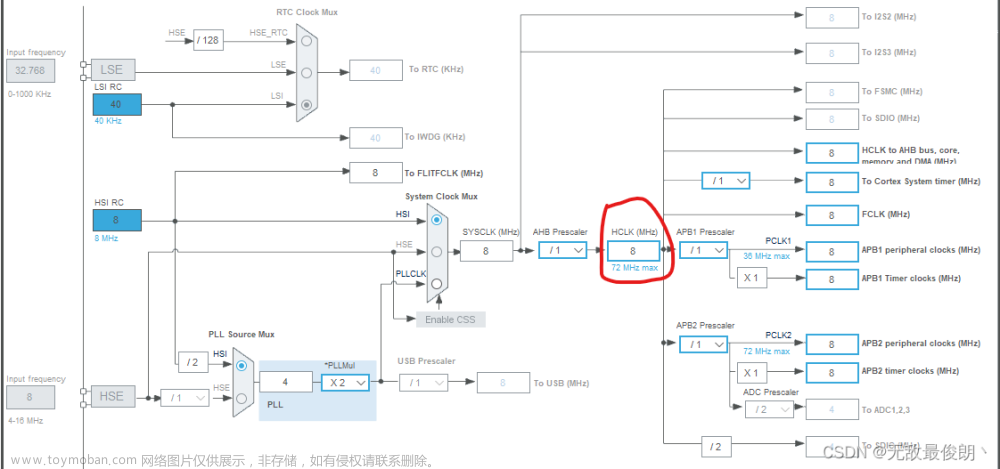
1.配置RCC,把涉及到的外设的时钟全部打开
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//打开串口的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//打开PA9和PA10的时钟
2.初始化GPIO口
GPIO_InitTypeDef GPIO_InitStruct;
//PA9引脚(对应串口发送功能)
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //TX引脚是USART外设控制的输出脚,所以要复用推挽输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//PA10引脚(对应串口接收功能)
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
3.初始化UART
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate = 9600;//设置波特率
USART_InitStruct.USART_HardwareFlowControl =USART_HardwareFlowControl_None; //硬件流控制
USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;//只需要发送则只需要TX,若需要接收则或上RX
USART_InitStruct.USART_Parity = USART_Parity_No;//无校验位
USART_InitStruct.USART_StopBits = USART_StopBits_1;//1位停止位
USART_InitStruct.USART_WordLength = USART_WordLength_8b;//选择8位字长
USART_Init(USART1,&USART_InitStruct);
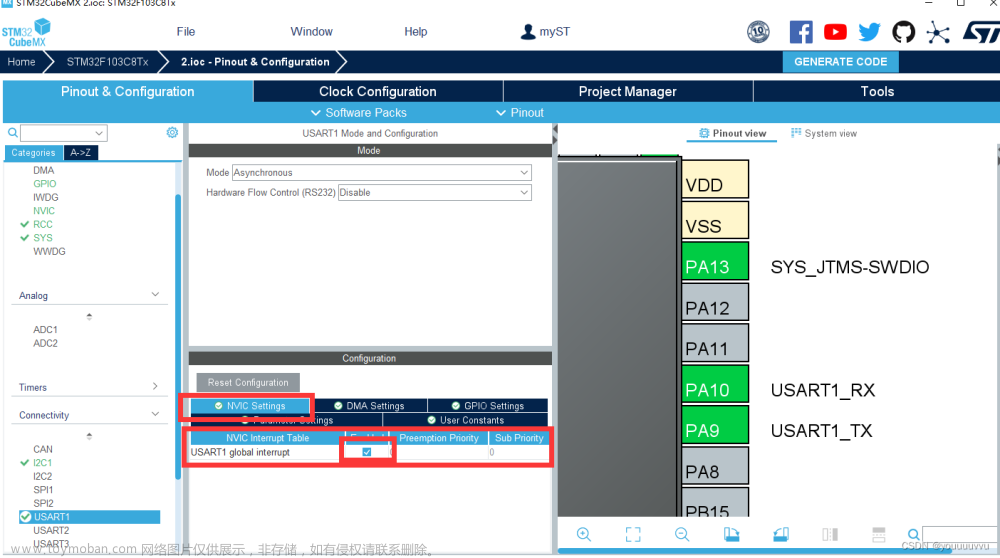
4.开启中断
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//开启串口对应中断
5.配置NVIC优先级和分组
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
6.开启USART外设
USART_Cmd(USART1,ENABLE);//开启USART外设
7.中断函数
根据标准库的封装,USART的中断函数名为
void USART1_IRQHandler(),这里由于还有其他函数的调用,直接给出Serial.c文件的完整代码。
#include "stm32f10x.h" // Device header
#include "stdio.h"
#include <stdio.h>
#include <string.h>
uint8_t Serial_RxFlag;//定义一个接收标志位
char Serial_RxPacket[100];//定义一个全局的char数组,范围可以给大一点,在头文件里会把这个数组extern出去方便再主函数直接用
void Serial_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
NVIC_InitTypeDef NVIC_InitStructure;
//第一步开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//打开PA9和PA10的时钟
//第二部初始化引脚
//PA9引脚
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //TX引脚是USART外设控制的输出脚,所以要复用推挽输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//PA10引脚
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//第三步初始化USART
USART_InitStruct.USART_BaudRate = 9600;//设置波特率
USART_InitStruct.USART_HardwareFlowControl =USART_HardwareFlowControl_None; //硬件流控制
USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;//只需要发送则只需要TX,若需要接收则或上RX
USART_InitStruct.USART_Parity = USART_Parity_No;//无校验位
USART_InitStruct.USART_StopBits = USART_StopBits_1;//1位停止位
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&USART_InitStruct);
//第四步开启中断
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1,ENABLE);//开启USART外设
}
uint8_t Serial_GetRxFlag(void) //用来返回一个是否接收完一个字符串的标志
{
if(Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1,Byte);//调用这个库函数byte变量写入到TDR
//需要等待一下,等待TDR数据移到移位寄存器了我们才能进行下一步的输出
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
//TXE发送数据寄存器空标志位,这个标志位会自动清零,不需要我们手动清除
}
void Serial_SendString(char *String) // 一个字符串发送函数
{
uint8_t i;
for(i=0;String[i]!=0;i++)
{
Serial_SendByte(String[i]);
}
}
//中断函数
void USART1_IRQHandler()
{
static u8 pRxpacket = 0;// 定义一个Rxpacket数组下标
static u8 Rxstate = 0; //定义标志位
if(USART_GetITStatus(USART1,USART_IT_RXNE)==SET)
{
u8 RxData = USART_ReceiveData(USART1);
if(Rxstate==0)
{
if(RxData=='[')//起始标志符为'['
{
memset(Serial_RxPacket,'\0',sizeof(Serial_RxPacket));//清空这个数组
pRxpacket = 0;//用来给数组赋值的数组下标必须在标志位Rxstate变之前就置0
Rxstate=1;
}
}
else if(Rxstate==1)
{
if(RxData==']')//结束标志符为']'
{
Rxstate=0;
Serial_RxFlag=1;//RxFlag置1证明已经取完一整个字符串,可以在主函数里读取这个字符串
}
else
{
Serial_RxPacket[pRxpacket] = RxData;
pRxpacket++;
}
}
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}
}
- 这里有几个值得注意的点:
- 1.在初始化外设的时候,只要涉及到调用标准库里的宏定义生成一个结构体变量的时候,必须写在最前面,否则编译的时候会报错。例如
GPIO_InitTypeDef GPIO_InitStruct; - 2.用来给数组赋值的数组下标
pRxstate必须在标志位Rxstate变之前就置0,否则在运行的时候下标不能及时归零。 - 3.起始标识符和结束标识符可以随意设置
8.主函数执行以及判断和响应
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include "Serial.h"
#include "Delay.h"
#include <string.h>
int main(void)
{
Serial_Init();
while(1)
{
if(Serial_GetRxFlag()==1)//如果接受标志位置1,也即成功读取了一个字符串
{
if(strcmp(Serial_RxPacket,"go stm32!")==0)//这里的字符串可以随意设置,
{
while(1)
{
Serial_SendString("hello windows!\n");
Delay_ms(800);
if(strcmp(Serial_RxPacket,"stop stm32!")==0)
{
break;
}
}
}
}
}
}
- 这里有也几个值得注意的点:
- 1.用来比较字符串的函数
strcmp()使用的时候必须包含头文件#include<stdio.h> - 2.这里能直接调用
Serial_RxPacket[]字符数组是因为在Serial.h头文件里把它extern出来了,而main函数又导入了Serial.h头文件,所以可以直接使用
9.头文件及工具文件
- Delay.c
#include "stm32f10x.h"
/**
* @brief 微秒级延时
* @param xus 延时时长,范围:0~233015
* @retval 无
*/
void Delay_us(uint32_t xus)
{
SysTick->LOAD = 72 * xus; //设置定时器重装值
SysTick->VAL = 0x00; //清空当前计数值
SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器
while(!(SysTick->CTRL & 0x00010000)); //等待计数到0
SysTick->CTRL = 0x00000004; //关闭定时器
}
/**
* @brief 毫秒级延时
* @param xms 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_ms(uint32_t xms)
{
while(xms--)
{
Delay_us(1000);
}
}
/**
* @brief 秒级延时
* @param xs 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_s(uint32_t xs)
{
while(xs--)
{
Delay_ms(1000);
}
}
- Delay.h
#ifndef __DELAY_H
#define __DELAY_H
void Delay_us(uint32_t us);
void Delay_ms(uint32_t ms);
void Delay_s(uint32_t s);
#endif
- Serial.h
#ifndef _Serial_H
#define _Serial_H
extern char Serial_RxPacket[];
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendString(char *String);
uint8_t Serial_GetRxFlag(void);
#include <stdio.h>
#endif
四.线路连接
这里接线比较简单,只用把PA9(串口发送)与RXD连接,PA10(串口接收端)与TXD连接就好

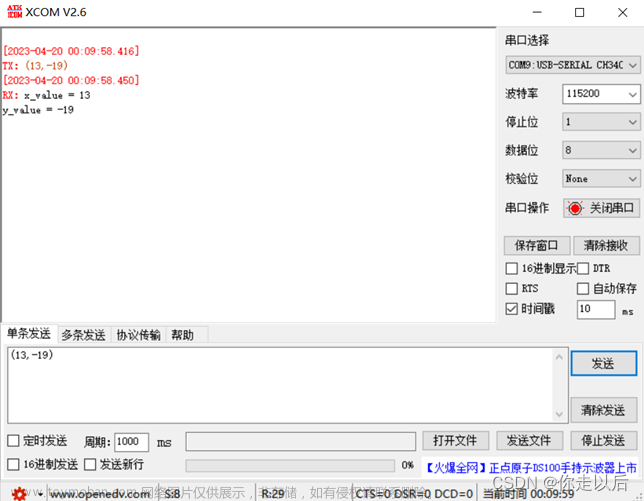
五.实验结果
生成的Hex文件,在FlyMcu进行烧录后,打开串口助手

 文章来源:https://www.toymoban.com/news/detail-676244.html
文章来源:https://www.toymoban.com/news/detail-676244.html
六.总结
多次试着使用标准库来完成项目后对外设的理解更深刻了,不过由于C语言的知识掌握不够号,导致在完成的过程中遇到了很多问题,这可能也是标准库比起HAL库比较麻烦的一点。标准库需要我们更熟练的掌握c语言的知识,而且如果不熟练的话会花费很多时间。文章来源地址https://www.toymoban.com/news/detail-676244.html
到了这里,关于# STM32中断方式实现串口通信(标准库)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!