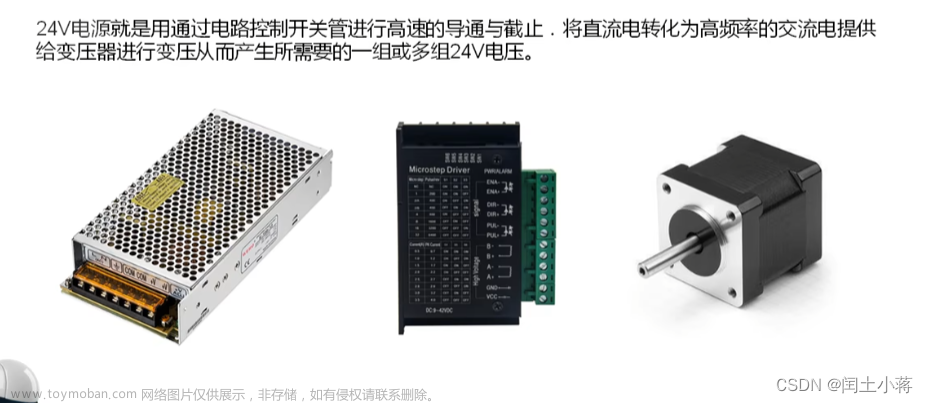
在DIY黑胶唱机的过程中,准备用一个42步进电机带动唱盘,需要恒定的每分钟33.33转的转速。
记录一下折腾的过程。
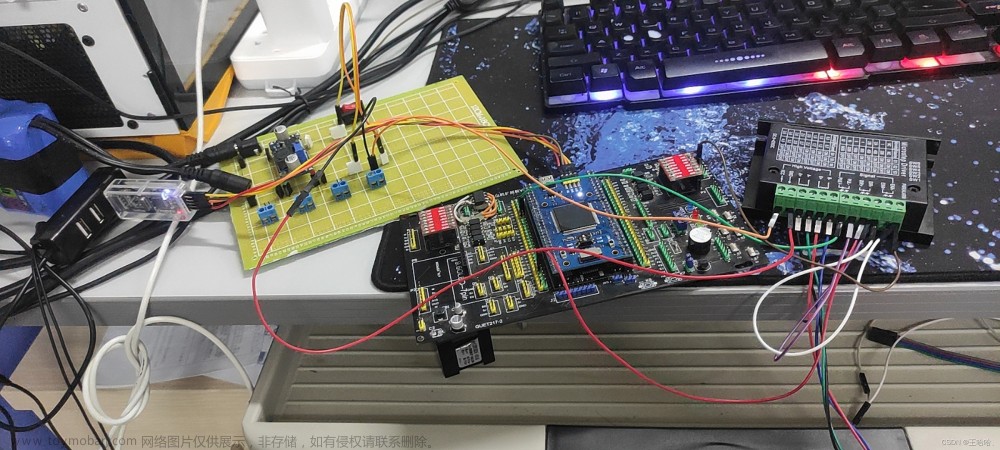
用洞洞板制作的驱动电路:

驱动板接线图
先拿价格便宜很多的A4988做实验

按照接线图在面包板上把线接好。
Ardunio代码如下:
bool PULSE_STATE = true;
// A4988引脚连接Arduino引脚编号
const int dirPin = 2; // Direction
const int stepPin = 3; // Step
const int sleepPin = 4; // Sleep
const int resetPin = 5; // Reset
const int ms3Pin = 6; // Ms3
const int ms2Pin = 7; // Ms2
const int ms1Pin = 8; // Ms1
const int enPin = 9; // Enable
void setup() {
// 设置引脚模式
pinMode(stepPin,OUTPUT);
pinMode(dirPin,OUTPUT);
pinMode(sleepPin,OUTPUT);
pinMode(resetPin,OUTPUT);
pinMode(ms3Pin,OUTPUT);
pinMode(ms2Pin,OUTPUT);
pinMode(ms1Pin,OUTPUT);
pinMode(enPin,OUTPUT);
// 初始化引脚状态
digitalWrite(sleepPin, HIGH);
digitalWrite(resetPin, HIGH);
digitalWrite(enPin, LOW);
digitalWrite(ms1Pin, LOW);
digitalWrite(ms2Pin, LOW);
digitalWrite(ms3Pin, LOW);
// 初始化电机步进模式为全步进
//TMC2209 64细分
digitalWrite(ms1Pin, LOW);
digitalWrite(ms2Pin, HIGH);
//Clockwise 顺时针旋转
digitalWrite(dirPin, 1);
cli(); //stop interrupts for till we make the settings
/*1. First we reset the control register to amke sure we start with everything disabled.*/
TCCR1A = 0; // Reset entire TCCR1A to 0
TCCR1B = 0; // Reset entire TCCR1B to 0
TCNT1 = 0;
// turn on CTC mode
TCCR1B |= (1 << WGM12);
/*2. We set the prescalar to the desired value by changing the CS10 CS12 and CS12 bits. */
TCCR1B |= B00000001;
/*3. We enable compare match mode on register A*/
TIMSK1 |= (1 << OCIE1A);
OCR1A = 1125; //Finally we set compare register A to this value
sei(); //Enable back the interrupts
}
void loop() {
// put your main code here, to run repeatedly:
}
ISR(TIMER1_COMPA_vect){
PULSE_STATE = !PULSE_STATE;
digitalWrite(stepPin,PULSE_STATE);
}
代码主要使用了Timer1定时器。需要计算发送到电机的脉冲频率。用的Arduino NANO 主频是26MHz, 普通42步进电机的步距角是1.8度,转一圈都要200个脉冲,A4988芯片最大可使用的细分是16细分,如果用16细分,转一圈都要20016=3200个脉冲。我的目标是每三分钟转100转,需要的脉冲频率是1003200/(3*60)=1777.77Hz
A4988驱动芯片噪音比较大,步进电机运转时震动比较大。试验成功之后,换上了高大上的TMC2209芯片,电机低速运转时超级安静,震动极小。TMC2209内部支持256细分,计算脉冲频率的时候需要重新计算一下。上面代码中使用的是TMC2209芯片的版本。文章来源:https://www.toymoban.com/news/detail-676382.html
用洞洞板制作的时候,用了一片LM7809稳压芯片给NANO主板供电,但当使用24伏电压时,LM7809芯片发热比较严重。后续准备换一个DCDC模块。
唱机视频演示文章来源地址https://www.toymoban.com/news/detail-676382.html
到了这里,关于Arduino 下用A4988或TMC2209驱动42步进电机的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!