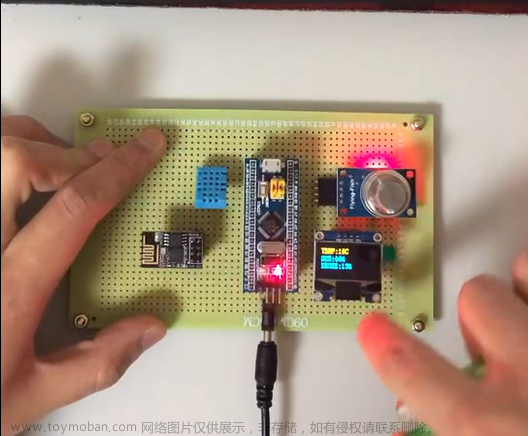
今天,完整地总结一下普中科技的单片机的串口通信的硬件与编程,记录一下以后如果需要也比较方便捡起来。
单片机的串口部分的电路图。开发板上集成了 1 个串口通信电路,是 USB 转串口模块,它既可下载程序也可实现串口通信功能。

对这个模块简要分析一下输入输出。

描述一下CH340芯片的作用。(带你全面解析USB转串口芯片CH340 - 采芯网 (findic.com))

实现的功能是:51 单片机通过串口(UART)实现与 PC 机对话, 51 单片机的串口收到 PC 机发来的数据后原封不动的返回给 PC 机显示。
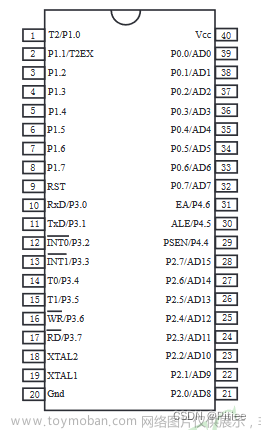
单片机串行口的结构

串口相关的寄存器。



我们一般选择串口工作在方式1下,定时器1工作在方式2下(8位自动重装)。
定时器(定时器1)与波特率的关系。


SBUF介绍
串口初始化。
void uart_init(u8 baud)
{
TMOD|=0X20; //设置计数器工作方式 2
SCON=0X50; //设置为工作方式 1
PCON=0X80; //波特率加倍
TH1=baud; //计数器初始值设置
TL1=baud;
ES=1; //打开串口中断
EA=1; //打开总中断
/*定时器1的方式2是8位自动重装,定时器一旦溢出,就自动重装,与中断无关,所以定时器1进入中断后无事可做,所以无需打开定时器1的中断*/
TR1=1; //打开计数器
}
void main()
{
uart_init(0XFA);//波特率为 9600
while(1)
{
}
}
void uart() interrupt 4 //串口通信中断函数
{
u8 rec_data;
RI = 0; //清除接收中断标志位
rec_data=SBUF; //存储接收到的数据
SBUF=rec_data; //将接收到的数据放入到发送寄存器
while(!TI); //等待发送数据完成
TI=0; //清除发送完成标志位
}完整程序如下所示
#include "reg52.h"
typedef unsigned int u16; //对系统默认数据类型进行重定义
typedef unsigned char u8;
/*******************************************************************************
* 函 数 名 : uart_init
* 函数功能 : 串口通信中断配置函数,通过设置TH和TL即可确定定时时间
* 输 入 : baud:波特率对应的TH、TL装载值
* 输 出 : 无
*******************************************************************************/
void uart_init(u8 baud)
{
TMOD|=0X20; //设置计数器工作方式2
SCON=0X50; //设置为工作方式1
PCON=0X80; //波特率加倍
TH1=baud; //计数器初始值设置
TL1=baud;
ES=1; //打开接收中断
EA=1; //打开总中断
TR1=1; //打开计数器
}
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
uart_init(0XFA);//波特率为9600
while(1)
{
}
}
void uart() interrupt 4 //串口通信中断函数
{
u8 rec_data;
RI = 0; //清除接收中断标志位
rec_data=SBUF; //存储接收到的数据
SBUF=rec_data; //将接收到的数据放入到发送寄存器
while(!TI); //等待发送数据完成
TI=0; //清除发送完成标志位
}我在其他博客看到的一些串口代码。
#include <REGX52.H>
/* **
* @brief 串口初始化 //4800bps@11.0592MHz
* @param 无
* @retval 无
*/
void UART_Init(void) //4800bps@11.0592MHz
{
PCON |= 0x80; //使能波特率倍速位SMOD
SCON = 0x50; //8位数据,可变波特率
TMOD &= 0x0F; //清除定时器1模式位
TMOD |= 0x20; //设定定时器1为8位自动重装方式
TL1 = 0xF4; //设定定时初值
TH1 = 0xF4; //设定定时器重装值
ET1 = 0; //禁止定时器1中断
TR1 = 1; //启动定时器1
EA = 1; //启动所有中断
ES = 1; //启动串口中断
}
/* * 串口发送模板
* @brief 串口发送一个字节数据
* @param Byte 要发送的一个数据
* @retval 无
*/
void UART_SendByte(unsigned char Byte)
{
SBUF = Byte;
while(TI == 0); //一执行完就要复位
TI = 0; //TI为发射控制器;RI为接受控制器;
}
/*串口中断函数模板
void UART_Routine() interrupt 4
{
if(RI = 1)
{
RI = 0;
}
}*/串口的发送与接收数据的过程与串口中断一点关系都没有,并不是不开串口中断就说明禁止了单片机的串口通信,单片机的串口中断只是提供了那么一种方法,即当你接收完数据或者发送完数据,想要先停止此时的串口通讯,进行其他的诸如数据处理的任务,不管是否开中断,只要将数据放入到SBUF中,就一定会将数据发送出去。定时器也是如此,不管有没有开中断,定时器都是在定时的,只不过有些工作方式在定时一次后,再一次定时时初始值会发生变化(工作方式2会自动重装)。
在串口发送数据的时候,自己不用考虑起始位以及停止位,将数据写入到SBUF中(肯定没有起始位以及停止位),单片机发送的时候会自动将数据包装,在前面和后面加上起始位以及停止位。

串口调试工具


我自己随便写了个PC端控制单片机LED亮灭的程序。
#include "reg52.h"
typedef unsigned int u16; //对系统默认数据类型进行重定义
typedef unsigned char u8;
sbit LED1=P2^0; //将P2.0管脚定义为LED1
/*******************************************************************************
* 函 数 名 : uart_init
* 函数功能 : 串口通信中断配置函数,通过设置TH和TL即可确定定时时间
* 输 入 : baud:波特率对应的TH、TL装载值
* 输 出 : 无
*******************************************************************************/
void uart_init(u8 baud)
{
TMOD|=0X20; //设置计数器工作方式2
SCON=0X50; //设置为工作方式1
PCON=0X80; //波特率加倍
TH1=baud; //计数器初始值设置
TL1=baud;
ES=1; //打开接收中断
EA=1; //打开总中断
TR1=1; //打开计数器
}
void delay_10us(u16 ten_us)
{
while(ten_us--);
}
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
uart_init(0XFA);//波特率为9600
while(1)
{
}
}
void send_Byte(u8 rec_data)
{
SBUF=rec_data; //将接收到的数据放入到发送寄存器
while(!TI); //等待发送数据完成
TI=0; //清除发送完成标志位
}
void uart() interrupt 4 //串口通信中断函数
{
if(RI)
{
u8 rec_data;
rec_data=SBUF; //存储接收到的数据
if(rec_data == 'G' || rec_data == 'g')
{
LED1=0; //点亮
delay_10us(50000); //大约延时450ms
LED1=1; //熄灭
delay_10us(50000);
}
send_Byte(rec_data);
RI = 0; //清除接收中断标志位
}
}printf重定向简介


char putchar(char c)
{
SendByte(c);
return c;
}
void SendByte(unsigned char data)
{
SBUF = data;
while(!TI);
TI = 0;
}附录:
51单片机之寄存器-3.3单片机串口通信之发送与接收 - 微波EDA网 (mweda.com)
单片机串行通信总结_单片机接收sbuff的条件为ri_tony_0620的博客-CSDN博客文章来源:https://www.toymoban.com/news/detail-677562.html
51单片机的串口通信(UART)及其应用_51单片机 uart_小菜冀的博客-CSDN博客文章来源地址https://www.toymoban.com/news/detail-677562.html
到了这里,关于单片机的串口通信的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!