文章来源地址https://www.toymoban.com/news/detail-678775.html
文章来源:https://www.toymoban.com/news/detail-678775.html
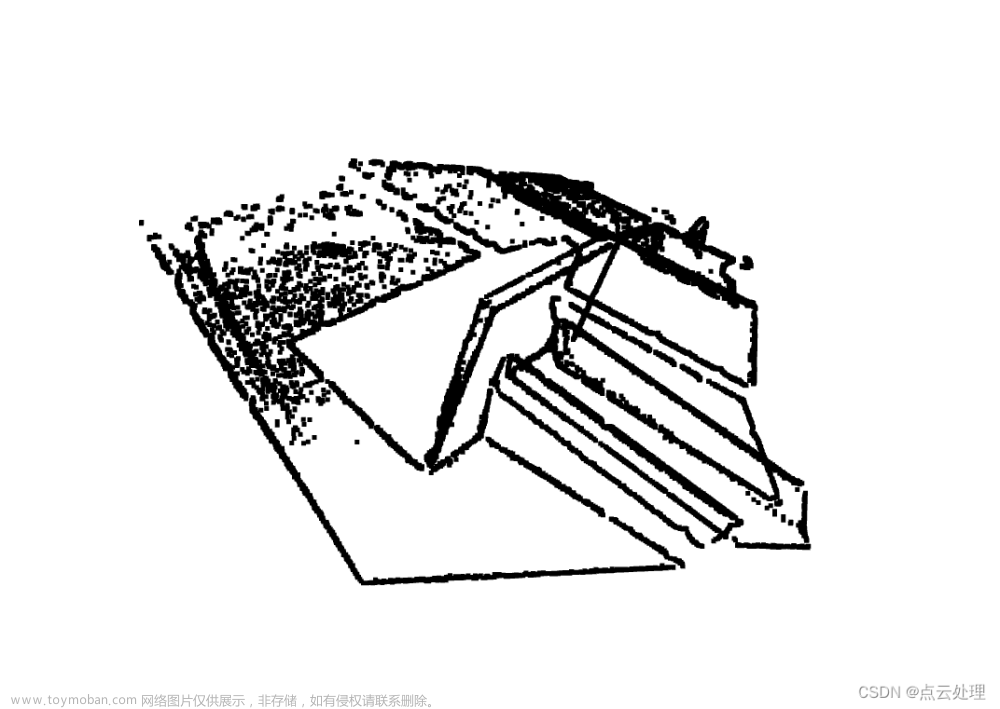
到了这里,关于3D点云处理:3D边缘提取(源码) Detecting Holes in Point Set Surfaces的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
这篇具有很好参考价值的文章主要介绍了3D点云处理:3D边缘提取(源码) Detecting Holes in Point Set Surfaces。希望对大家有所帮助。如果存在错误或未考虑完全的地方,请大家不吝赐教,您也可以点击"举报违法"按钮提交疑问。
文章来源地址https://www.toymoban.com/news/detail-678775.html
文章来源:https://www.toymoban.com/news/detail-678775.html
到了这里,关于3D点云处理:3D边缘提取(源码) Detecting Holes in Point Set Surfaces的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处: 如若内容造成侵权/违法违规/事实不符,请点击违法举报进行投诉反馈,一经查实,立即删除!
订阅说明:如果要订阅,先看链接内容 看链接内容 看链接内容:订阅先看此内容 文章目录: 3D视觉个人学习目录 目标:对采集的圆柱面点云展开为平面; 应用:可用于检测圆柱侧面的凹凸缺陷; 圆柱的侧面展开原理是将一个圆柱体(或柱体)的侧面展开成一个矩
![[Halcon&3D] 3D鞋点胶的点云边界提取](https://imgs.yssmx.com/Uploads/2024/02/484756-1.png)
📢博客主页:https://loewen.blog.csdn.net 📢欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正! 📢本文由 丶布布 原创,首发于 CSDN, 转载注明出处 🙉 📢现在的付出,都会是一种沉淀,只为让你成为更好的人✨ 一. 边界提取的常规思路 3D鞋实物图如下所示: 鞋点胶的点云边界
![[3D&Halcon] 3D鞋点胶的点云边界提取](https://imgs.yssmx.com/Uploads/2024/02/555223-1.png)
📢博客主页:https://loewen.blog.csdn.net 📢欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正! 📢本文由 丶布布 原创,首发于 CSDN, 转载注明出处 🙉 📢现在的付出,都会是一种沉淀,只为让你成为更好的人✨ 一. 边界提取的常规思路 3D鞋实物图如下所示: 鞋点胶的点云边界
对于简化后续计算步骤,或者提取点云特征都比较有用 结果如下图; 代码如下:
上一篇介绍了几种常见的点云下采样算法,这些算法得到的点云都不会强化特征,因为其计算原理要么是随机要么是根据格网或半径方式。 点云关键点提取是指从一个点云数据集中提取出一些重要的点,以便用于后续的点云分析和处理。 在点云处理中,关键点通常包括高曲
Open3D 实现建筑物点云立面和平面分割提取 点云数据在现实场景中广泛应用,例如建筑物三维重建、智能交通等领域。然而,点云数据量庞大且噪声较多,因此需要对其进行处理和分析。Open3D 是一款开源的跨平台点云处理库,在点云数据预处理、三维重建和可视化等方面有着

在图像处理中,提取图像特征主要从两个角度,区域或者边缘。提取亚像素边缘有三种思路,提取过后再用边缘模板匹配,连接与分割都可以。这里不涉及边缘对用作视觉测量类的算子,仅对刚学习halcon的新人而言。 这幅图代表着在项目的过程中使用边缘的三种思路。之前某

👨🎓 个人主页: 研学社的博客 💥💥💞💞 欢迎来到本博客 ❤️❤️💥💥 🏆博主优势: 🌞🌞🌞 博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️ 座右铭: 行百里者,半于九十。 📋📋📋 本文目录如下: 🎁🎁🎁 目录 💥1 概述 📚2 运行结果 🎉
ISS3D(Intrinsic Shape Signatures 3D ):ISS3D算法是一种基于曲率变化的点云关键点提取算法。它通过计算每个点与其近邻点的曲率变化,得到该点的稳定性和自适应尺度,从而提取稳定性和尺度合适的关键点。 Harris3D :Harris3D算法是一种基于协方差矩阵的点云关键点提取算法。它通



