题目要求:
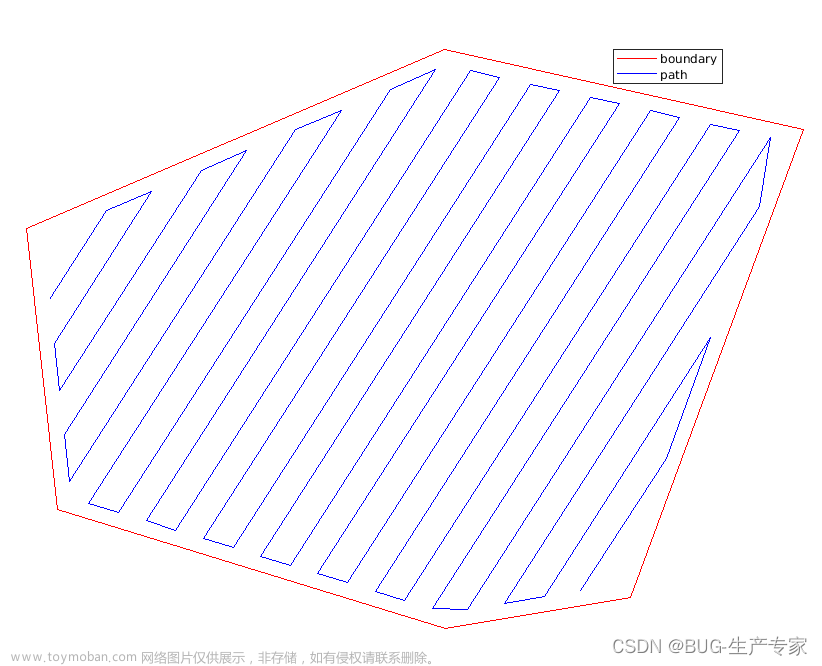
机器人路径规划是机器人自主导航的关键技术,旨在在有障碍物的环境中按照一定的标准寻找一条从起点到终点的无碰撞路径。本题要求考虑路程最短,起点和终点以及障碍物的相关数据在代码中给出。
解决方案:
本次实验采用RRT算法来进行机器人路径规划问题的求解,RRT即快速扩展搜索算法,通过快速扩展一群像树一样的路径以探索空间大部分区域,来找到可行路径,是对状态空间随机采样的说法,需要随机选取采样点,进行碰撞检测,但是该算法是非最优的。
- 设定起点与终点,以及状态状态采样空间
- 进行随机采样,若采样点在障碍物内部,则重新采样
- 若采样成功,则计算该采样点与已经生成的采样节点集合中所有节点的距离,获取最近的节点坐标,从该节点以给定步长为单位走向采样点
- 经过反复多次迭代,可生成随机扩展树,最终找到一条从起点到终点的目标路径
代码:文章来源:https://www.toymoban.com/news/detail-679645.html
mapinit.m文章来源地址https://www.toymoban.com/news/detail-679645.html
%随机生成障碍物
function [f,n1]=mapinit(n)
f=[];%储存障碍物信息
n1=n;%返回障碍物个数
p=0;
%二维障碍地图
%画出地图框
set(gca,'XTick',0:10:100);
set(gca,'YTick',0:10:100)到了这里,关于机器人路径规划+matlab的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!