1.详细介绍FreeRTOS操作系统,然后举了几个实例
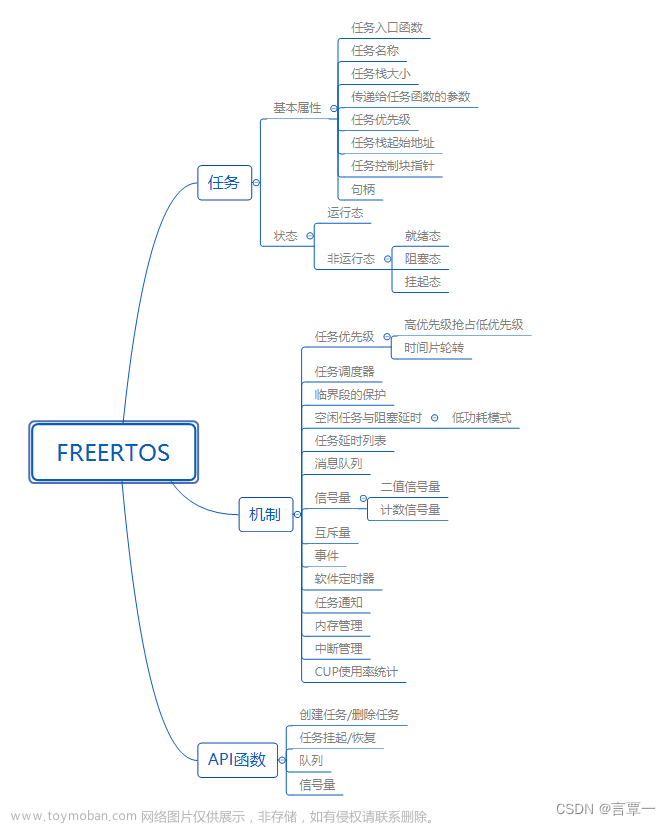
FreeRTOS(Free Real-Time Operating System)是一个开源的嵌入式实时操作系统,它专门设计用于在资源有限的嵌入式系统中运行。FreeRTOS提供了一些用于任务管理、调度、同步和通信的功能,使开发者能够轻松地创建可靠的嵌入式系统。
以下是FreeRTOS的一些特点和功能:
-
轻量级:FreeRTOS的内核非常小巧,通常只占用很少的ROM和RAM资源,适合在资源有限的嵌入式系统中使用。
-
实时性:FreeRTOS支持实时任务调度,能够处理实时任务的优先级和截止期限,从而保证任务能够按照预定的时间要求得到执行。
-
多任务支持:FreeRTOS可以创建多个任务,每个任务都有自己的栈空间和优先级,并且可以独立地运行,实现多任务并发执行。
-
任务管理:FreeRTOS提供了丰富的任务管理功能,包括任务的创建、删除、挂起、恢复和优先级控制等。
-
调度器:FreeRTOS采用优先级抢占式调度策略,支持多任务之间的优先级管理和任务切换。
-
通信和同步:FreeRTOS提供了多种通信和同步机制,如信号量、互斥量、消息队列和事件标志组等,方便任务之间的通信和资源共享。
-
硬件抽象:FreeRTOS提供了硬件抽象层接口,支持在不同硬件平台上的移植,方便在不同的嵌入式系统上使用。
以下是一些使用FreeRTOS的实际应用示例:
以上这些示例只是FreeRTOS应用的一小部分,实际上FreeRTOS可以广泛应用于各种嵌入式系统,包括工业控制、自动化、通信、医疗、消费电子等领域。通过合理地使用FreeRTOS的任务管理、调度、同步和通信功能,开发者可以构建出高效可靠的嵌入式系统。
-
智能家居系统:在智能家居系统中,需要对多个传感器和执行器进行实时的任务调度和控制,例如温度传感器、光照传感器、门窗控制等。使用FreeRTOS可以方便地创建多个任务来处理这些任务,并通过信号量和消息队列等通信机制进行任务间的同步和通信。
-
工业自动化系统:在工业自动化系统中,需要对多个设备进行实时的任务调度和控制,例如控制器、传感器、执行器等。使用FreeRTOS可以方便地创建多个任务来处理这些任务,并通过互斥量和事件标志组等通信机制进行任务间的同步和通信。
-
汽车电控系统:在汽车电控系统中,需要对多个子系统进行实时的任务调度和控制,例如引擎控制、车身控制、通信模块等。使用FreeRTOS可以方便地创建多个任务来处理这些
任务,并通过消息队列和事件标志组等通信机制进行任务间的同步和通信。例如,可以创建一个任务来监控引擎的工作状态,另一个任务来处理车辆的通信模块,而另一个任务则负责处理车身控制。这些任务可以通过FreeRTOS的任务管理和通信机制进行协同工作,实现汽车电控系统的实时控制和管理。
-
医疗设备:在医疗设备中,例如呼吸机、心电监护仪等,需要对多个传感器和控制器进行实时的任务调度和控制。使用FreeRTOS可以方便地创建多个任务来处理这些任务,并通过互斥量和消息队列等通信机制进行任务间的同步和通信。例如,可以创建一个任务来处理呼吸机的呼吸控制,另一个任务来处理心电监护仪的数据采集和处理,从而实现医疗设备的实时监控和控制。
-
智能监控系统:在智能监控系统中,需要对多个摄像头、传感器和控制器进行实时的任务调度和处理,例如图像处理、数据传输、报警处理等。使用FreeRTOS可以方便地创建多个任务来处理这些任务,并通过消息队列和事件标志组等通信机制进行任务间的同步和通信。例如,可以创建一个任务来处理图像采集和处理,另一个任务来处理报警事件,从而实现智能监控系统的实时监测和报警处理。
2.如何通过合理地使用FreeRTOS的任务管理、调度、同步和通信功能
使用FreeRTOS的任务管理、调度、同步和通信功能,可以通过以下方式合理地进行应用:
-
任务管理:合理规划和管理任务是使用FreeRTOS的第一步。可以根据系统需求和任务的优先级,创建不同的任务,并设置其堆栈大小、优先级和任务处理函数。同时,可以使用FreeRTOS提供的任务管理函数,如xTaskCreate()、vTaskDelete()、vTaskSuspend()、vTaskResume()等,来动态地创建、删除、挂起和恢复任务。
-
任务调度:FreeRTOS提供了基于优先级的抢占式任务调度。任务的优先级越高,越容易获取CPU的执行权。合理设置任务的优先级,可以确保系统按照预期的方式进行任务调度。同时,可以使用FreeRTOS提供的任务延时、任务挂起和任务恢复等函数,如vTaskDelay()、vTaskSuspend()、vTaskResume()等,来进行任务的时间控制和状态管理。
-
同步和通信:在多任务系统中,任务之间通常需要进行同步和通信,以确保数据的一致性和任务的协同工作。FreeRTOS提供了多种同步和通信机制,如信号量、互斥量、队列、事件标志组等。可以合理地使用这些功能来实现任务之间的同步和通信,确保任务按照预期的顺序和方式进行执行。
-
中断处理:在嵌入式系统中,中断处理是一种常见的任务。FreeRTOS提供了中断安全的API函数,如xSemaphoreGiveFromISR()、xSemaphoreTakeFromISR()、xQueueSendFromISR()、xQueueReceiveFromISR()等,用于在中断处理中进行任务间的同步和通信。合理地使用这些函数可以确保中断处理与任务调度之间的正确协同工作。
-
资源管理:在嵌入式系统中,资源管理是一项重要的任务。可以通过合理地使用FreeRTOS的任务管理、调度、同步和通信功能,对系统的资源进行管理和分配,包括CPU资源、内存资源、外设资源等,从而实现系统的高效利用和资源优化。
需要注意的是,合理地使用FreeRTOS的任务管理、调度、同步和通信功能需要根据具体的应用场景和系统需求进行设计和实现。开发者应根据系统的实际情况,灵活选择和配置FreeRTOS的功能,以满足系统的实时性、可靠性和性能需求。同时,需要仔细考虑任务的优先级、任务之间的同步和通信机制、中断处理等因素,以确保系统的正确运行和稳定性。
3.使用STM32CubeMX创建简单的FreeRTOS项目
步骤
- 用stm32cubemi新建一个c8t6的工程
- RCC进行配置

3.配置调试器,同时这里设置FreeRTOS基础时钟TIM1,要不然默认选择systick时,在使用FreeRTOS时会将systick用作基础时钟。

4.选择GPIO口输出当作LED灯

5.选择FreeRTOS,这里选择的是CMSIS_V2,一般对于新的设计,我们应该选择新的版本,所以选择CMSIS_V2

6.添加任务,设置led闪烁任务

7.配置时钟

8.最后生成工程,打个项目工程文件,在freertos中找到添加的任务修改代码
void LED2(void *argument)
{
/* USER CODE BEGIN LED2 */
/* Infinite loop */
for(;;)
{
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_5);
osDelay(1000);
}
/* USER CODE END LED2 */
}
9.实验现象:设置的led灯一闪一闪。文章来源:https://www.toymoban.com/news/detail-680089.html
有何相关问题评论区尽管提问,我会尽可能回答!文章来源地址https://www.toymoban.com/news/detail-680089.html
到了这里,关于STM32初学者入门FreeRTOS操作系统,多任务实时系统的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!