✨简介:
通过STM32控制传感器实现气体浓度的测量:RS485+MODBUS+串口DMA+定时器。
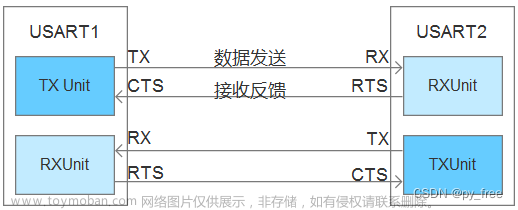
其中,USART2负责控制数据的发送和接受,USART3负责将询问帧、应答帧以及处理后数据打印出来,TIM1负责每隔1秒发送一次询问帧。
持续更新手中的项目(导师给的活)经验。。。
打工人加油🐱🚀🐱🚀🐱🚀
✨工具:
STM32CubeMX、串口调试助手、Modbus Poll、Modbus Slave
✨RS485协议:
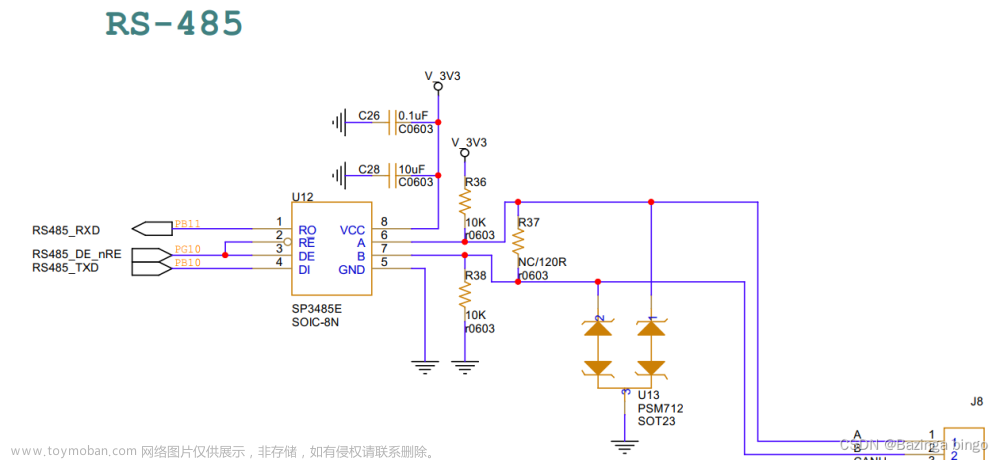
废话不多说,RS485协议是一个硬件层的通信协议,与之相似的还有RS232协议。硬件层协议就好比两个要通信的设备之间修了一条路。一般我们只要知道芯片如何用就行,比如RS485一般就用MAX485ESA,通常有6个引脚,其中:RT、RX负责和MCU进行数据的收发;AI+、BI+和外设(LYNDIR传感器)连接;DE、RE通常连接起来,通过MCU给“0”或“1”使能MAX485ESA进行收/法数据。
✨MODBUS协议:
废话不多说,MODBUS协议是一个软件层的通信协议((是 OSI 模型第 7 层上的应用层报文传输协议))。相对硬件层通信协议它就好比这条公路上规定的交通规则,规定了车辆通过的数量和方向等。
😁协议描述:
该协议就是主从应答方式实现,主机向从机发送一串数据,从机收到后执行相应的操作(读/写寄存器),之后向主机发送一串数据(包含传感器测得数据,如:SO2的浓度,压力值等)。
😜1. 主机向从机发送的数据:
设备地址:从机的地址
功能码:通常用到0x03(读取从机寄存器的数据);0x06(向一个寄存器中写入数据);0x10(多个寄存器写入数据)
例如: 20 03 00ED 0005 13 4D-------------------其中:20从机的地址,03功能码,00ED起始寄存器地址,0005就是读到地址为00F1的寄存器(其实就是要读寄存器的个数:五个), 13 4D校验码(💖💖💖后附代码发送时自动生成)。
😜2.从机应答的数据:
设备地址和功能码:对应发送帧,不变。
**例如:0X20 03 0A 42C85C900104144CCCD 7158 **-----------------其中:0A是接受的数据长度(10个字节);71 58校验码。
😜3. 小结:
关于MODBUS协议其实就是通过MCU按照外设(LYNDIR传感器)规定的传输方式发送数据,然后传感器读取后返回数据。
本次项目使用的是STM32F103ZET6的USART2以及MAX485ESA芯片实现MODEBUS协议。其中USART2使用的DMA接受。
💖💖💖后附具体代码
✨串口DMA模式收发数据:
😜1. DMA模式:
DMA传输将数据从一个地址空间复制到另一个地址空间,提供在外设和存储器之间或者存储器和存储器之间的高速数据传输。
在实现DMA传输时,是由DMA控制器直接掌管总线,因此,存在着一个总线控制权转移问题。即DMA传输前,CPU要把总线控制权交给DMA控制器,而在结束DMA传输后,DMA控制器应立即把总线控制权再交回给CPU。一个完整的DMA传输过程必须经过DMA请求、DMA响应、DMA传输、DMA结束4个步骤。
😜2. STM32CubMX配置:


😜3. 接受的代码
①stm32f1xx_it.c
void USART2_IRQHandler(void)
{
/* USER CODE BEGIN USART2_IRQn 0 */
uint8_t ii;
if(__HAL_UART_GET_FLAG(&huart2,UART_FLAG_IDLE) != RESET)
{
__HAL_UART_CLEAR_IDLEFLAG(&huart2);
__HAL_UART_FLUSH_DRREGISTER(&huart2); //清除 IDLE中断
U2RxIdleCplt();
}
if(__HAL_UART_GET_FLAG(&huart2, UART_FLAG_IDLE|UART_FLAG_PE
| UART_FLAG_ORE | UART_FLAG_NE |UART_FLAG_FE) != RESET)//出错
{
__HAL_UART_CLEAR_FLAG(&huart2, UART_FLAG_IDLE|UART_FLAG_PE |
UART_FLAG_ORE | UART_FLAG_NE | UART_FLAG_FE);//串口异常处理:Overrun溢出等
//读SR后读DR清除ORE (清除方法是“先读SR寄存器,再读DR寄存器”,清除IDLE中断)
ii = huart2.Instance->SR;
ii = huart2.Instance->DR;
ii++;
}
//清除标志位
__HAL_UART_CLEAR_IDLEFLAG(&huart2);
/* USER CODE END USART2_IRQn 0 */
HAL_UART_IRQHandler(&huart2);
/* USER CODE BEGIN USART2_IRQn 1 */
②usart.c
void U2RxIdleCplt(void)
{
__HAL_UART_CLEAR_IDLEFLAG(&huart2); //清楚中断标记
HAL_UART_DMAStop(&huart2); //同时关收发DMA
gi_U2RxCounter = U2RXLTH - __HAL_DMA_GET_COUNTER(&hdma_usart2_rx); //接受的=总的数据量减去未接受的数据量
gb_U2RxCplt = 1;//接受标记位
memcpy(U2DataBuffer,dataBuff,gi_U2RxCounter);
HAL_UART_AbortReceive(&huart2); //只关闭接收的函数
HAL_UART_Receive_DMA(&huart2,dataBuff,U2RXLTH); //重新启动DMA接受
#ifdef MASTER_MODBUS
if(gi_U2RxCounter >= 15)//
{
MD_bus_master_rev_Cplt(U2DataBuffer,gi_U2RxCounter);
}
#endif
}
③ mian.cl
HAL_UART_DMAStop(&huart2);
HAL_UART_AbortReceive(&huart2);
HAL_UART_Receive_DMA(&huart2,dataBuff,sizeof(dataBuff)); //打开串口DMA接收
__HAL_UART_ENABLE_IT(&huart2, UART_IT_IDLE); //开启空闲中断
😜4. 发送的代码
RS485_TX_ENABLE; //使能485的发送引脚
HAL_UART_Transmit_DMA(&huart2,modbus.Host_Txbuf,8); //串口2DMA方式发送,modbus.Host_Txbuf发送帧存的数组,8个字节长度
✨其他代码:(本部分为我自己遇到到的一些盲点和难点,大佬当看笑话就行😘)
😜1. CRC校验:直接调用就行
/* CRC 高位字节值表 */
const uint8_t auchCRCHi[] = {
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40
} ;
/* CRC低位字节值表*/
const uint8_t auchCRCLo[] = {
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06,
0x07, 0xC7, 0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD,
0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09,
0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A,
0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14, 0xD4,
0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3,
0xF2, 0x32, 0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4,
0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A,
0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29,
0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED,
0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60,
0x61, 0xA1, 0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67,
0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F,
0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68,
0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E,
0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,
0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71,
0x70, 0xB0, 0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92,
0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C,
0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B,
0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89, 0x4B, 0x8B,
0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,
0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42,
0x43, 0x83, 0x41, 0x81, 0x80, 0x40
} ;
/******************************************************************
功能: CRC16校验
输入:
输出:
******************************************************************/
uint16_t Modbus_CRC16( uint8_t *puchMsg, uint16_t usDataLen )
{
uint8_t uchCRCHi = 0xFF ; // 高CRC字节初始化
uint8_t uchCRCLo = 0xFF ; // 低CRC 字节初始化
unsigned long uIndex ; // CRC循环中的索引
while ( usDataLen-- ) // 传输消息缓冲区
{
uIndex = uchCRCHi ^ *puchMsg++ ; // 计算CRC
uchCRCHi = uchCRCLo ^ auchCRCHi[uIndex] ;
uchCRCLo = auchCRCLo[uIndex] ;
}
return ( uchCRCHi << 8 | uchCRCLo ) ;
}
😜2.需要将十六进制转换为float型:(例如:0X42C85C29------->100.18)
原理:链接: link
实际应用中通常利用联合体实现转化,直接上代码:
static union {
float flo;
char buf[4];
}HexFloat;
float write_hex_to_float(uint32_t number)
{
uint16_t dat0 = number & 0x0000FFFF;
uint16_t dat1 = (number >> 16) & 0x0000FFFF;
HexFloat.buf[0] = dat0 & 0xFF;
HexFloat.buf[1] = (dat0 >> 8) & 0xFF;
HexFloat.buf[2] = dat1 & 0xFF;
HexFloat.buf[3] = (dat1 >> 8) & 0xFF;
float fdata = HexFloat.flo;
return fdata;
}
😜3.需要将uint_8转化为uint_16和uint_32类型(十六进制):
uint16_t num_1_2=(Rc_dat[1]<<8)+Rc_dat[2];
uint32_t num_Pressure=(Rc_dat[3]<<24)+(Rc_dat[4]<<16)+(Rc_dat[5]<<8)+(Rc_dat[6]);
uint16_t num_7_8=(Rc_dat[7]<<8)+Rc_dat[8];
uint32_t num_potency=(Rc_dat[9]<<24)+(Rc_dat[10]<<16)+(Rc_dat[11]<<8)+(Rc_dat[12]);
😍😍😍注意:printf打印输出会自动省略十六进制高位0的。
利用%x-------->%02x:打印输出两位并且高位补零(0x2------->0x02)
printf("Receive:0X%02x%04x%08x%04x%08x\r\n",Rc_dat[0],num_1_2,num_Pressure,num_7_8,num_potency);
😜4. 复制数组:
首先记得添加头文件:#include “string.h”
memcpy(DataBuffer,dataBuff,RxCounter);
注意:以dataBuff指向的地址为起点,将连续的RxCounter个字节数据,复制到以DataBuffer指向的地址为起点的内存中。
函数有三个参数,第一个是目标地址,第二个是源地址,第三个是数据长度。
😜5. 定时器1:一秒钟发一次询问帧
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) //定时器1重写回调函数
{
if(htim->Instance==TIM2)
{
modbus.Host_Sendtime++;//发送完上一帧后的时间计数
if(modbus.Host_Sendtime>1000)//距离发送上一帧数据1s了
{
//1s时间到
modbus.Host_time_flag=1;//发送数据标志位置1
}
}
}
😜 6. 其他的好像没什么难点了,都是STM32F103常规的代码
✨实验结果:
😜 1. STM32F103作为主机与Modbus Slave(从机)进行初步测试:
本次测试只是测试USART2的发送功能(是否正确发送询问帧)
Modbus Slave的具体配置看参考:
https://blog.csdn.net/u012749085/article/details/125308525?spm=1001.2014.3001.5506
😜2. 最终测试结果MCU+USART2+USART3+TMI+RS485+MODBUS:
STM32F103ZET6控制USART2和RS485的RE/DE脚实现询问帧的发送和应答帧的接受,TM1实现轮询,USART3实现发送和接受数据的打印。
 文章来源:https://www.toymoban.com/news/detail-680303.html
文章来源:https://www.toymoban.com/news/detail-680303.html
✨总结:
本人也是在校生一枚,导师让完成项目,也是自己一边学一边做,大佬勿喷。🌹🌹🌹
如果文章对你帮助的话,可以给我点个赞,点个收藏,评论下更先显温情呦!🌹🌹🌹
欢迎大家讨论,互相学习,一起努力。QQ2544066178🌹🌹🌹
最后祝大家顺利毕业。🌹🌹🌹
持续更新手中的项目经验。。。文章来源地址https://www.toymoban.com/news/detail-680303.html
到了这里,关于# 项目一:STM32+串口DMA+RS485+MODBUS+传感器实现SO2的测试的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!