目录
什么是定时器?
软件定时器优缺点
软件定时器原理
软件定时器相关配置
单次定时器和周期定时器
软件定时器相关 API 函数
1. 创建软件定时器
2. 开启软件定时器
3. 停止软件定时器
4. 复位软件定时器
5. 更改软件定时器定时时间
实操
cubeMX配置
代码实现
什么是定时器?
简单可以理解为闹钟,到达指定一段时间后,就会响铃。
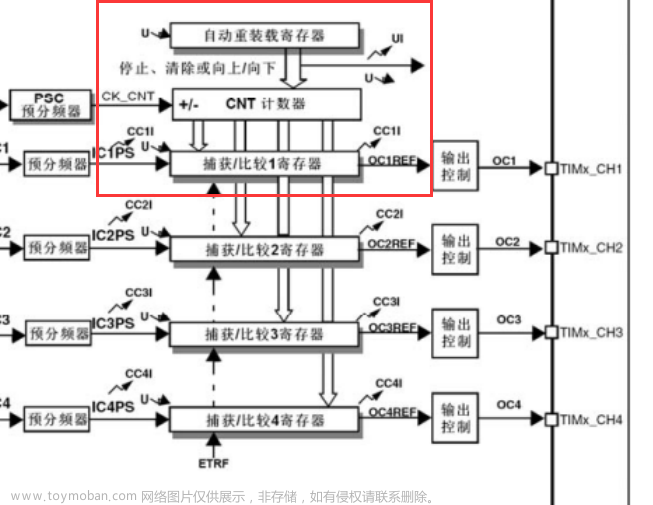
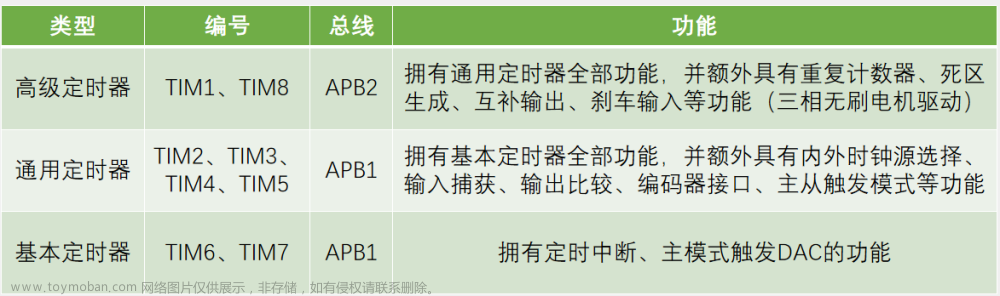
STM32
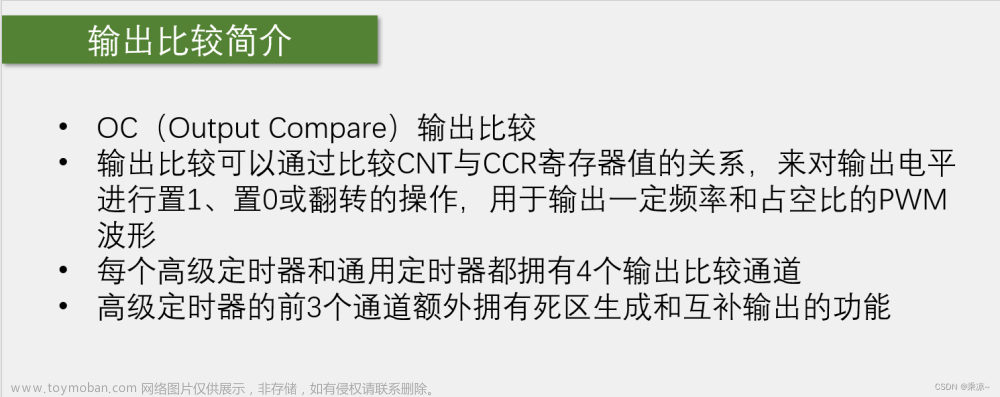
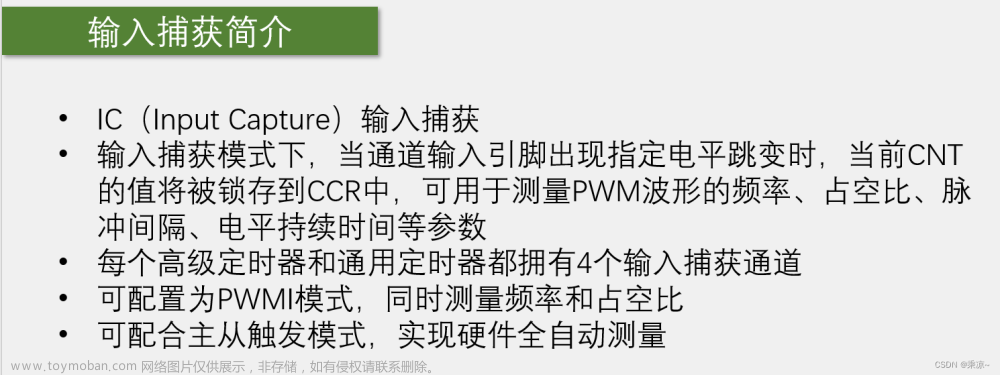
芯片自带硬件定时器,精度较高,达到定时时间后会触发中断,也可以生成
PWM
、输入
捕获、输出比较,等等,功能强大,但是由于硬件的限制,个数有限。
软件定时器也可以实现定时功能,达到定时时间后可调用回调函数,可以在回调函数里处理信
息。
软件定时器优缺点
优点:
1.
简单、成本低;
2.
只要内存足够,可创建多个;
缺点:
精度较低,容易受中断影响。在大多数情况下够用,但对于精度要求比较高的场合不建议使用。
软件定时器原理
定时器是一个可选的、不属于
FreeRTOS
内核的功能,它是由定时器服务任务来提供的。
在调用函数
vTaskStartScheduler()
开启任务调度器的时候,会创建一个用于管理软件定时器的任
务,这个任务就叫做软件定时器服务任务。
1.
负责软件定时器超时的逻辑判断
2.
调用超时软件定时器的超时回调函数
3.
处理软件定时器命令队列
FreeRTOS
提供了很多定时器有关的
API
函数,这些
API
函数大多都使用
FreeRTOS
的队列发送命令给
定时器服务任务。
这个队列叫做定时器命令队列
。定时器命令队列是提供给
FreeRTOS
的软件定时
器使用的,
用户不能直接访问
!

文章来源:https://www.toymoban.com/news/detail-680501.html
软件定时器相关配置
软件定时器有一个定时器服务任务和定时器命令队列,这两个东西肯定是要配置的,相关的配置
也是放到文件
FreeRTOSConfig.h
中的,涉及到的配置如下:
1
、
configUSE_TIMERS
如果要使用软件定时器的话宏
configUSE_TIMERS
一定要设置为
1
,当设置为
1
的话定时器服务任务就会在启动FreeRTOS
调度器的时候自动创建。
2
、
configTIMER_TASK_PRIORITY
设置软件定时器服务任务的任务优先级,可以为
0~(configMAX_PRIORITIES-1)
。优先级一定要根
据实际的应用要求来设置。如果定时器服务任务的优先级设置的高的话,定时器命令队列中的命 令和定时器回调函数就会及时的得到处理。
3
、
configTIMER_QUEUE_LENGTH
此宏用来设置定时器命令队列的队列长度。
4
、
configTIMER_TASK_STACK_DEPTH
此宏用来设置定时器服务任务的任务堆栈大小。
单次定时器和周期定时器
单次定时器:
只超时一次,调用一次回调函数。可手动再开启定时器;
周期定时器:
多次超时,多次调用回调函数。
软件定时器相关 API 函数
|
函数
|
描述
|
|
xTimerCreate()
|
动态方式创建软件定时
|
|
xTimerCreateStatic()
|
静态方式创建软件定时器
|
|
xTimerStart()
|
开启软件定时器定时
|
|
xTimerStop()
|
停止软件定时器定时
|
|
xTimerReset()
|
复位软件定时器定时
|
|
xTimerChangePeriod()
|
更改软件定时器的定时超时时间
|
|
xTimerStartFromISR()
|
在中断中开启软件定时器定时
|
|
xTimerStopFromISR()
|
在中断中停止软件定时器定时
|
|
xTimerResetFromISR()
|
在中断中复位软件定时器定时
|
|
xTimerChangePeriodFromISR()
|
在中断中更改定时超时时间
|
1. 创建软件定时器
TimerHandle_t xTimerCreate( const char * const pcTimerName ,const TickType_t xTimerPeriod ,const UBaseType_t uxAutoReload ,void * const pvTimerID ,TimerCallbackFunction_t pxCallbackFunction );
参数:
pcTimerName
:软件定时器名称
xTimerPeriodInTicks
:定时超时时间,单位:系统时钟节拍。宏
pdMS_TO_TICKS()
可用于将以毫秒为单位指定的时间转换为以
tick
为单位指定的时间。
uxAutoReload
:定时器模式,
pdTRUE
:周期定时器,
pdFALSE
:单次定时器
pvTimerID
:软件
定时器
ID
,用于多个软件定时器公用一个超时回调函数
pxCallbackFunction
:软件定时器超时回
调函数
返回值:
成功:定时器句柄
失败:
NULL
2. 开启软件定时器
BaseType_t xTimerStart ( TimerHandle_t xTimer ,TickType_t xBlockTime );
参数:
xTimer
:待开启的软件定时器的句柄
xTickToWait
:发送命令到软件定时器命令队列的最大等待时
间
返回值:
pdPASS
:开启成功
pdFAIL
:开启失败
3. 停止软件定时器
BaseType_t xTimerStop ( TimerHandle_t xTimer ,TickType_t xBlockTime );
参数与返回值同上。
4. 复位软件定时器
BaseType_t xTimerReset ( TimerHandle_t xTimer ,TickType_t xBlockTime );
参数与返回值同上。
该功能将使软件定时器的重新开启定时,复位后的软件定时器以复位时的时刻作为开启时刻重新
定时。
5. 更改软件定时器定时时间
BaseType_t xTimerChangePeriod ( TimerHandle_t xTimer ,TickType_t xNewPeriod ,TickType_t xBlockTime );
xNewPeriod
:新的定时超时时间,单位:系统时钟节拍。
其余参数与返回值同上。
实操
实验需求
创建两个定时器:
定时器
1
,周期定时器,每
1
秒打印一次
CHL shuai
定时器
2
,单次定时器,启动后
2
秒打印一次
laochen shuai
cubeMX配置
 文章来源地址https://www.toymoban.com/news/detail-680501.html
文章来源地址https://www.toymoban.com/news/detail-680501.html
代码实现
/* USER CODE BEGIN Header */
/**
******************************************************************************
* File Name : freertos.c
* Description : Code for freertos applications
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
/* USER CODE END Variables */
osThreadId defaultTaskHandle;
osTimerId myTimer01Handle;
osTimerId myTimer02Handle;
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartDefaultTask(void const * argument);
void Callback01(void const * argument);
void Callback02(void const * argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/* GetIdleTaskMemory prototype (linked to static allocation support) */
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize );
/* GetTimerTaskMemory prototype (linked to static allocation support) */
void vApplicationGetTimerTaskMemory( StaticTask_t **ppxTimerTaskTCBBuffer, StackType_t **ppxTimerTaskStackBuffer, uint32_t *pulTimerTaskStackSize );
/* USER CODE BEGIN GET_IDLE_TASK_MEMORY */
static StaticTask_t xIdleTaskTCBBuffer;
static StackType_t xIdleStack[configMINIMAL_STACK_SIZE];
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCBBuffer;
*ppxIdleTaskStackBuffer = &xIdleStack[0];
*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
/* place for user code */
}
/* USER CODE END GET_IDLE_TASK_MEMORY */
/* USER CODE BEGIN GET_TIMER_TASK_MEMORY */
static StaticTask_t xTimerTaskTCBBuffer;
static StackType_t xTimerStack[configTIMER_TASK_STACK_DEPTH];
void vApplicationGetTimerTaskMemory( StaticTask_t **ppxTimerTaskTCBBuffer, StackType_t **ppxTimerTaskStackBuffer, uint32_t *pulTimerTaskStackSize )
{
*ppxTimerTaskTCBBuffer = &xTimerTaskTCBBuffer;
*ppxTimerTaskStackBuffer = &xTimerStack[0];
*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
/* place for user code */
}
/* USER CODE END GET_TIMER_TASK_MEMORY */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* Create the timer(s) */
/* definition and creation of myTimer01 */
osTimerDef(myTimer01, Callback01);
myTimer01Handle = osTimerCreate(osTimer(myTimer01), osTimerPeriodic, NULL);
/* definition and creation of myTimer02 */
osTimerDef(myTimer02, Callback02);
myTimer02Handle = osTimerCreate(osTimer(myTimer02), osTimerOnce, NULL);
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the defaultTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN StartDefaultTask */
//osTimerStart(myTimer01Handle, 1000);
xTimerChangePeriod(myTimer01Handle, pdMS_TO_TICKS(1000), 0);
osTimerStart(myTimer02Handle, 2000);
/* Infinite loop */
for(;;)
{
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}
/* Callback01 function */
void Callback01(void const * argument)
{
/* USER CODE BEGIN Callback01 */
printf("liangxu shuai\r\n");
/* USER CODE END Callback01 */
}
/* Callback02 function */
void Callback02(void const * argument)
{
/* USER CODE BEGIN Callback02 */
printf("laochen shuai\r\n");
/* USER CODE END Callback02 */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */
到了这里,关于STM32软件定时器的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!