引言
从本节开始,将对最优化理论与方法进行简单认识。
什么是最优化问题
无论是最优化理论还是最优化方法,讨论的对象都是最优化问题。
关于最优化问题的一种简单描述:最优化问题本质上属于决策问题。
- 例如路径选择问题:确定达到目的地最佳路径的计量标准。其中问题的目标可能包含:路径距离最短、行驶费用最少等等。
- 再例如车辆调度问题:通过制定行车路线,使车辆再满足一定约束条件下,有序通过一系列装货点和卸货点,以达到如最短路程、耗时最少、费用最小等目标。
也就是说,我们需要从若干个可执行策略中挑出一个/若干个策略,从而使待处理问题的目标达到最优。
具体的说,一个最优化问题会包含如下三个部分:
- 决策变量:在执行策略过程中需要做决定的信息。例如车辆调度问题中的路径选择。
- 目标函数:在制定策略之前,需要明确要优化的目标。而目标函数是对目标的计量方式进行表达。目标函数可能不止一个,不同角度的目标可能对应不同的目标函数。例如上述车辆调度问题中的最短路程、耗时最小、费用最小。它们都可以作为目标,从而制定相应的目标函数。
- 约束条件:由可行策略组成的集合,通常使用等式/不等式进行描述。
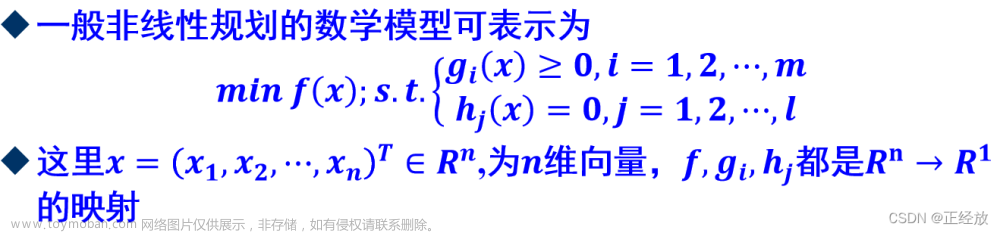
最优化问题的基本形式
关于最优化问题的数学符号表达如下:
{
min
or
max
f
(
x
)
x
=
(
x
1
,
⋯
,
x
p
)
T
s.t.
{
g
i
(
x
)
≤
0
i
=
1
,
2
,
⋯
,
m
h
j
(
x
)
=
0
j
=
1
,
2
,
⋯
,
l
x
∈
X
\begin{cases} \begin{aligned} & \min \text{ or } \max f(x) \quad x = (x_1,\cdots,x_p)^T \\ & \text{s.t. } \begin{cases} g_i(x) \leq 0 \quad i=1,2,\cdots,m \\ h_j(x) = 0 \quad j = 1,2,\cdots,l \\ \end{cases} \\ & x \in \mathcal X \end{aligned} \end{cases}
⎩
⎨
⎧min or maxf(x)x=(x1,⋯,xp)Ts.t. {gi(x)≤0i=1,2,⋯,mhj(x)=0j=1,2,⋯,lx∈X
-
其中 x i ( i = 1 , 2 , ⋯ , p ) x_i(i=1,2,\cdots,p) xi(i=1,2,⋯,p)是决策变量;而 x x x则表示由若干决策变量组成的决策向量。
-
而目标函数作为目标的计量方式,它必然与决策向量相关。它具体描述为关于决策向量的一个函数:
也就是说,一旦得到一个/一组确定的决策x x x,必然会得到目标相应的计量结果f ( x ) f(x) f(x)。
f ( x ) = f ( x 1 , x 2 , ⋯ , x p ) f(x) = f(x_1,x_2,\cdots,x_p) f(x)=f(x1,x2,⋯,xp)
而 min f ( x ) \min f(x) minf(x)与 max f ( x ) \max f(x) maxf(x)分别表示对目标函数最小化或最大化,根据实际情况而定。 -
而 g i ( x ) g_i(x) gi(x)同样是关于决策向量 x x x的一个函数。在执行决策的过程中,可能存在相关资源的限制。而 g i ( x ) ≤ 0 g_i(x) \leq 0 gi(x)≤0则是一种不等式相关的条件限制,称作不等式约束。
同理, h j ( x ) = 0 h_j(x) = 0 hj(x)=0则是一种等式相关的条件限制,被称作等式约束。
这里的i , j i,j i,j描述不等式/等式约束的编号,对应的m , l m,l m,l描述不等式/等式约束的数量。 -
而 x ∈ X x \in \mathcal X x∈X则表示决策向量 x x x的定义域空间 X \mathcal X X。通常情况下,对 X \mathcal X X的描述比较简单、宽泛。例如: X ∈ R p \mathcal X \in \mathbb R^p X∈Rp,即 x x x是一个实数向量; X ∈ R + p \mathcal X \in \mathbb R_+^p X∈R+p,即 x x x是一个非负的实数向量; X ∈ Z p \mathcal X \in \mathcal Z^p X∈Zp,即 x x x是一个整数向量等等。根据具体的实际问题具体设置。
虽然
X
\mathcal X
X描述了
x
x
x的基本性质,但并不代表
X
\mathcal X
X内的所有值
x
x
x都可以取到。观察如下集合:
S
=
{
x
∈
X
∣
g
i
(
x
)
≤
0
,
i
=
1
,
2
,
⋯
,
m
;
h
j
(
x
)
=
0
,
j
=
1
,
2
,
⋯
,
l
}
\mathcal S = \{x \in \mathcal X \mid g_i(x) \leq 0,i=1,2,\cdots,m;h_j(x) = 0,j=1,2,\cdots,l\}
S={x∈X∣gi(x)≤0,i=1,2,⋯,m;hj(x)=0,j=1,2,⋯,l}
这个集合
S
\mathcal S
S同样是描述决策向量
x
x
x的集合,但不同于
X
\mathcal X
X的是,它被称作上述优化问题的可行域。也就是说,决策向量
x
x
x可在可行域
S
\mathcal S
S内进行取值。而
x
∈
S
x \in \mathcal S
x∈S则表示在可行域范围
S
\mathcal S
S内的一种决策/一个决策向量
x
x
x,也被称作一个可行解。
最优化问题的分类
关于上述最优化问题的基本形式/一般形式,可以通过不同角度对最优化问题进行分类:这仅是几种常见分类~
- 如果最优化问题中没有约束条件(等式 h j ( x ) = 0 h_j(x) = 0 hj(x)=0、不等式 g i ( x ) ≤ 0 g_i(x) \leq 0 gi(x)≤0约束),被称作无约束优化;相反,被称作约束优化;
- 如果最优化问题中目标函数/约束条件中存在非线性函数,被称作非线性优化;反之,被称作线性优化;
其中线性优化也即运筹学中的线性规划。 - 关于决策向量
x
x
x,对其内部随机变量的离散/连续性,将其划分为离散优化/连续优化。
也可以通过可行域 S \mathcal S S内决策向量 x x x的数量进行表述。如果数量可数,则是离散优化;反之,则是连续优化。 - 如果最优化问题中同时存在多个目标函数,被称作多目标优化;反之,被称作单目标优化。
各分类最优化问题的数学表达
约束优化VS无约束优化
关于无约束优化的数学符号表示如下:
min
f
(
x
)
\min f(x)
minf(x)
虽然在整个运筹学中,最优化问题来自于实际的生产问题——在制定决策(目标函数)过程中,该决策必然伴随着约束条件。例如上面描述的资源限制、成本、人力、投资等等实际问题中的限制。
从而基于这些限制建模产生的优化问题通常情况下不会是无约束优化问题。但一些情况下:我们可以通过一些策略将约束优化问题转化为无约束优化问题的形式,并加以求解。例如一个约束优化示例表示如下:
{
min
f
(
x
)
s.t.
g
(
x
)
=
0
\begin{cases} \min f(x) \\ \text{s.t. } g(x) = 0 \end{cases}
{minf(x)s.t. g(x)=0
并将其转化为如下优化问题的表达形式:
min
{
f
(
x
)
+
M
⋅
[
g
(
x
)
]
2
}
\min \left\{ f(x) + \mathcal M \cdot [g(x)]^2 \right\}
min{f(x)+M⋅[g(x)]2}
其中
M
\mathcal M
M取一个充分大的数值。之所以将
M
\mathcal M
M取值充分大的目的是:
- 在保证 f ( x ) f(x) f(x)达到最小之前,必然要先保证 g ( x ) ⇒ 0 g(x) \Rightarrow 0 g(x)⇒0,因为如果 g ( x ) ≠ 0 g(x) \neq 0 g(x)=0,那么 [ g ( x ) ] 2 [g(x)]^2 [g(x)]2必然是一个正值,该结果与 M \mathcal M M相乘后必然是一个较大的量,从而该结果必然与要优化的目标相悖。
可以通过这种方法,可以将上述示例的约束优化问题转化为对应的无约束优化问题。一些常见的无约束优化方法如:这里没有添加链接的部分后续补上~
- 最速下降法(梯度下降法)
- 牛顿法
- 共轭梯度法
而上面这种将约束优化转化为无约束优化的约束优化方法被称作罚函数法。在后续进行逐步介绍。
线性规划VS非线性规划
关于线性规划标准形式的数学符号描述(示例)表示如下:
{
min
C
T
x
s.t.
A
x
=
b
;
x
≥
0
\begin{cases} \min \mathcal C^T x \\ \text{s.t. } \mathcal A x = b;x \geq 0 \end{cases}
{minCTxs.t. Ax=b;x≥0
针对求解线性规划问题的常用方法是单纯形算法
(
Simplex Algorithm
)
(\text{Simplex Algorithm})
(Simplex Algorithm)。它的思路可简单描述为:线性规划方法这里仅作科普使用~
- 算法支撑:如果线性规划问题的最优解存在,则一定可以在其可行域的顶点中找到。
- 具体思路:先找出可行域内的一个顶点,根据一定规则判断其是否最优;
- 如果上述顶点不是最优,则转换到与该顶点相邻的另一顶点,并使目标函数达到最优;直到找到某最优解为止。
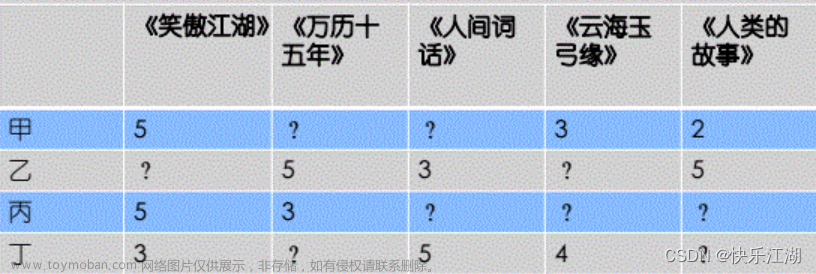
关于非线性规划(示例)—— Markowitz \text{Markowitz} Markowitz均值-方差模型:
-
假设投资市场中有 n n n个可投资的风险资产 ( Risk Assets ) (\text{Risk Assets}) (Risk Assets):对当前时刻的价格已知,但不知其未来时刻的价格;
-
其中编号为 i ( i = 1 , 2 , ⋯ , n ) i(i=1,2,\cdots,n) i(i=1,2,⋯,n)的资产,它的收益率表示为 R i \mathcal R_i Ri;作为投资者,在资产 i i i上的投资比重(单位:百分比)记作 x i x_i xi,其中 x i ∈ [ 0 , 1 ] x_i \in [0,1] xi∈[0,1];对应地,投资者对所有风险资产均存在一个投资比重,从而得到一个投资比重向量(决策向量) X \mathcal X X:
X = ( x 1 , x 2 , ⋯ , x n ) T ∑ i = 1 n x i = 1 \mathcal X = (x_1,x_2,\cdots,x_n)^T \quad \sum_{i=1}^n x_i = 1 X=(x1,x2,⋯,xn)Ti=1∑nxi=1 -
关于决策向量 X \mathcal X X对应的收益量是关于 X \mathcal X X的一个函数,并表示为如下形式:
R ( X ) = R 1 ⋅ x 1 + R 2 ⋅ x 2 + ⋯ + R n ⋅ x n \mathcal R(\mathcal X) = \mathcal R_1 \cdot x_1 + \mathcal R_2 \cdot x_2 + \cdots +\mathcal R_n \cdot x_n R(X)=R1⋅x1+R2⋅x2+⋯+Rn⋅xn
由于这些资产是风险资产,那么关于各资产的收益率 R i ( i = 1 , 2 , ⋯ , n ) \mathcal R_i(i=1,2,\cdots,n) Ri(i=1,2,⋯,n)自然是不确定的。因而 R i \mathcal R_i Ri是一个随机变量;在 Markowitz \text{Markowitz} Markowitz均值-方差模型中对收益描述表示为收益量期望 E [ R ( X ) ] \mathbb E[\mathcal R(\mathcal X)] E[R(X)]的形式:记E [ R i ] = r i ( i = 1 , 2 , ⋯ , n ) \mathbb E[\mathcal R_i] = r_i(i=1,2,\cdots,n) E[Ri]=ri(i=1,2,⋯,n)。
E [ R ( X ) ] = E [ R 1 ⋅ x 1 + R 2 ⋅ x 2 + ⋯ + R n ⋅ x n ] = r 1 ⋅ x 1 + r 2 ⋅ x 2 + ⋯ + r n ⋅ x n = ∑ i = 1 n r i ⋅ x i \begin{aligned} \mathbb E[\mathcal R(\mathcal X)] & = \mathbb E[\mathcal R_1 \cdot x_1 + \mathcal R_2 \cdot x_2 + \cdots + \mathcal R_n \cdot x_n] \\ & = r_1 \cdot x_1 + r_2 \cdot x_2 + \cdots + r_n \cdot x_n \\ & = \sum_{i=1}^n r_i \cdot x_i \end{aligned} E[R(X)]=E[R1⋅x1+R2⋅x2+⋯+Rn⋅xn]=r1⋅x1+r2⋅x2+⋯+rn⋅xn=i=1∑nri⋅xi
由于收益的不确定性越大,风险越大。因此 Markowitz \text{Markowitz} Markowitz均值-方差模型关于对风险的描述表示为收益量方差 Var [ R ( X ) ] \text{Var}[\mathcal R(\mathcal X)] Var[R(X)]:衡量随机变量 R ( X ) \mathcal R(\mathcal X) R(X)关于期望结果 E [ R ( X ) ] \mathbb E[\mathcal R(\mathcal X)] E[R(X)]附近波动程度的考量:其中Cov ( R i , R j ) \text{Cov}(\mathcal R_i,\mathcal R_j) Cov(Ri,Rj)表示随机变量R i , R j \mathcal R_i,\mathcal R_j Ri,Rj的协方差结果。记作σ i j \sigma_{ij} σij。
Var [ R ( X ) ] = ∑ i = 1 n ∑ j = 1 n Cov ( R i , R j ) x i x j = ∑ i = 1 n ∑ j = 1 n σ i j ⋅ x i x j \text{Var}[\mathcal R(\mathcal X)] = \sum_{i=1}^n\sum_{j=1}^n \text{Cov}(\mathcal R_i,\mathcal R_j) x_i x_j = \sum_{i=1}^n\sum_{j=1}^n \sigma_{ij} \cdot x_ix_j Var[R(X)]=i=1∑nj=1∑nCov(Ri,Rj)xixj=i=1∑nj=1∑nσij⋅xixj -
从而对应的最优化问题描述表示如下:
{ max ∑ i = 1 n r i ⋅ x i min ∑ i = 1 n ∑ j = 1 n σ i j ⋅ x i x j \begin{cases} \begin{aligned} & \max \sum_{i=1}^n r_i\cdot x_i \\ & \min \sum_{i=1}^n \sum_{j=1}^n \sigma_{ij} \cdot x_ix_j \end{aligned} \end{cases} ⎩ ⎨ ⎧maxi=1∑nri⋅ximini=1∑nj=1∑nσij⋅xixj
针对上述问题,一种建模方式是:在给定收益量范围的条件下,使风险达到最小:其中
Γ
\Gamma
Γ描述给定收益量范围的下界~
{
min
∑
i
=
1
n
∑
j
=
1
n
σ
i
j
⋅
x
i
x
j
s.t.
{
∑
i
=
1
n
r
i
⋅
x
i
≥
Γ
∑
i
=
1
n
x
i
=
1
X
≥
0
\begin{cases} \begin{aligned} & \min \sum_{i=1}^n \sum_{j=1}^n \sigma_{ij} \cdot x_i x_j \\ & \text{s.t. } \begin{cases} \sum_{i=1}^n r_i \cdot x_i \geq \Gamma \\ \sum_{i=1}^n x_i = 1 \\ \mathcal X \geq 0 \end{cases} \end{aligned} \end{cases}
⎩
⎨
⎧mini=1∑nj=1∑nσij⋅xixjs.t. ⎩
⎨
⎧∑i=1nri⋅xi≥Γ∑i=1nxi=1X≥0
很明显,虽然约束条件均是线性约束;但目标函数明显是二次的、非线性的。关于上述问题的建模方式不止一种,很容易能够联想到:在给定风险接受范围的条件下,使收益达到最大:
-
同理,这里的Δ \Delta Δ描述风险接受范围的上界~ -
无论上面还是下面,都可以称作‘均值-方差模型’Mean-Variance \text{Mean-Variance} Mean-Variance。 -
不管是目标函数还是约束条件中存在非线性函数,它们都称作非线性优化问题。
{ max ∑ i = 1 n r i ⋅ x i s.t. { ∑ i = 1 n ∑ j = 1 n σ i j ⋅ x i x j ≤ Δ ∑ i = 1 n x i = 1 X ≥ 0 \begin{cases} \begin{aligned} & \max \sum_{i=1}^n r_i \cdot x_i \\ & \text{s.t. } \begin{cases} \sum_{i=1}^n \sum_{j=1}^n \sigma_{ij} \cdot x_ix_j \leq \Delta \\ \sum_{i=1}^n x_i = 1 \\ \mathcal X \geq 0 \end{cases} \end{aligned} \end{cases} ⎩ ⎨ ⎧maxi=1∑nri⋅xis.t. ⎩ ⎨ ⎧∑i=1n∑j=1nσij⋅xixj≤Δ∑i=1nxi=1X≥0
连续优化VS离散优化
这里依然以上述的均值-方差模型为例,关于决策变量 x i ( i = 1 , 2 , ⋯ , n ) x_i(i=1,2,\cdots,n) xi(i=1,2,⋯,n)的取值 ∈ [ 0 , 1 ] \in [0,1] ∈[0,1],也就是说,该范围内的任意值均有意义。因而该优化也是连续优化;
如果在均值-方差模型约束条件的基础上,增加额外的约束条件:将风险资产的投资数量限制在
m
m
m个
(
m
<
n
)
(m < n)
(m<n),其余条件以及目标函数均不变。对应建模结果如下:可以利用指示函数
I
(
⋅
)
\mathbb I(\cdot)
I(⋅)对该约束条件进行描述
⇒
I
(
x
i
)
=
{
1
if
x
i
>
0
0
Otherwise
\Rightarrow \mathbb I(x_i) = \begin{cases} 1 \quad \text{if }x_i > 0 \\ 0 \quad \text{Otherwise} \end{cases}
⇒I(xi)={1if xi>00Otherwise
{
min
∑
i
=
1
n
∑
j
=
1
n
σ
i
j
⋅
x
i
x
j
s.t.
{
∑
i
=
1
n
r
i
⋅
x
i
≥
Γ
∑
i
=
1
n
x
i
=
1
X
≥
0
∑
i
=
1
n
I
(
x
i
)
≤
m
\begin{cases} \begin{aligned} & \min \sum_{i=1}^n \sum_{j=1}^n \sigma_{ij} \cdot x_i x_j \\ & \text{s.t. } \begin{cases} \sum_{i=1}^n r_i \cdot x_i \geq \Gamma \\ \sum_{i=1}^n x_i = 1 \\ \mathcal X \geq 0 \\ \sum_{i=1}^n \mathbb I(x_i) \leq m \end{cases} \end{aligned} \end{cases}
⎩
⎨
⎧mini=1∑nj=1∑nσij⋅xixjs.t. ⎩
⎨
⎧∑i=1nri⋅xi≥Γ∑i=1nxi=1X≥0∑i=1nI(xi)≤m
很明显:要从
n
n
n个风险资产中离散地选择
m
m
m个结果,这是明显的离散优化,并且是整数规划。
单目标优化VS多目标优化
依然可以使用
Markowitz
\text{Markowitz}
Markowitz均值-方差模型为例,关于它的最优化问题:
{
max
∑
i
=
1
n
r
i
⋅
x
i
min
∑
i
=
1
n
∑
j
=
1
n
σ
i
j
⋅
x
i
x
j
\begin{cases} \begin{aligned} & \max \sum_{i=1}^n r_i\cdot x_i \\ & \min \sum_{i=1}^n \sum_{j=1}^n \sigma_{ij} \cdot x_ix_j \end{aligned} \end{cases}
⎩
⎨
⎧maxi=1∑nri⋅ximini=1∑nj=1∑nσij⋅xixj
明显可以理解为:包含两个目标函数的多目标优化;关于多目标优化的处理方式:
- 按照非线性规划中的处理方式:将其中一个目标函数保留,其他目标函数转化为约束条件;
- 将多目标优化转化为单目标优化。即:多个目标函数整合成一个目标函数。例如:给各目标函数赋予权重:
-
通过负号将两个目标函数的优化方向归一; -
通过权重τ \tau τ控制两个目标函数的比重。
-
min { τ ⋅ [ ∑ i = 1 n ∑ j = 1 n σ i j ⋅ x i x j ] − ∑ i = 1 n r i ⋅ x i } \min \left\{\tau \cdot \left[\sum_{i=1}^n \sum_{j=1}^n \sigma_{ij} \cdot x_i x_j\right] - \sum_{i=1}^n r_i \cdot x_i\right\} min{τ⋅[i=1∑nj=1∑nσij⋅xixj]−i=1∑nri⋅xi}文章来源:https://www.toymoban.com/news/detail-681456.html
相关参考:
最优化理论与方法-第一讲:最优化问题概述文章来源地址https://www.toymoban.com/news/detail-681456.html
到了这里,关于机器学习笔记之最优化理论与方法(一)最优化问题概述的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!