实验目的:驱动风扇,蜂鸣器,马达进行工作
目录
一,PWM相关概念
有源蜂鸣器和无源蜂鸣器
二,分析电路图,框图
三,分析RCC章节
1,确定总线连接
2,根据总线内容确定基地址
3.分析RCC章节所需寄存器
1,RCC_MP_AHB4ENSETR寄存器
2,RCC_MP_APB1ENSETR寄存器
四,分析GPIO章节寄存器
1,GPIOx_MODER寄存器
2,GPIOx_AFRL寄存器
五,分析TIM4章节
1,概述:编辑
2,特点:
计数方式:
3.内部框图
4,捕获 / 比较寄存器 CCR(Capture / Compare 1register)
5,分频工作原理
6,分析TIM4寄存器
1,分析TIMx_CR1寄存器
2,分析TIMx_CCMR1寄存器
3,分析TIMx_CCER寄存器
4,分析TIMx_PSC寄存器
5,分析TIMx_ARR寄存器
6,分析TIMx_CCR1寄存器
六,风扇,马达
一,PWM相关概念
PWM:(Pulse Width Modulation)脉冲宽度调制:是一种占空比可变的脉冲波形,是一种对模拟信号电平进行数字编码的方法
脉冲: 方波信号,高低电平变化会产生方波信号
周期:高低电平变化所需要的时间,单位ms
频率:周期和频率之间成倒数关系,单位:HZ,1s中可以产生多少个方波信号
占空比:在一个方波内,高电平占整个周期的百分比

有源蜂鸣器和无源蜂鸣器
1,源不是电源,是震荡源
2,有源蜂鸣器内部有一个震荡源,高电平发出响声,编程给高低电平即可
3,无源蜂鸣器内部没有震荡源,需要特定的方波信号驱动进行工作,价格较便宜
4,本实验开发板有缘当无源使用,产生PWM方波
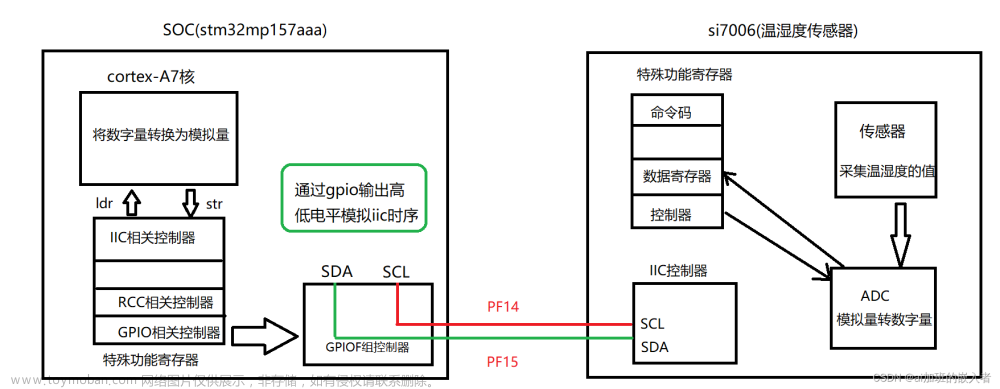
二,分析电路图,框图
1.根据扩展版原理图 网络编号:结合资源扩展板 对应引脚:
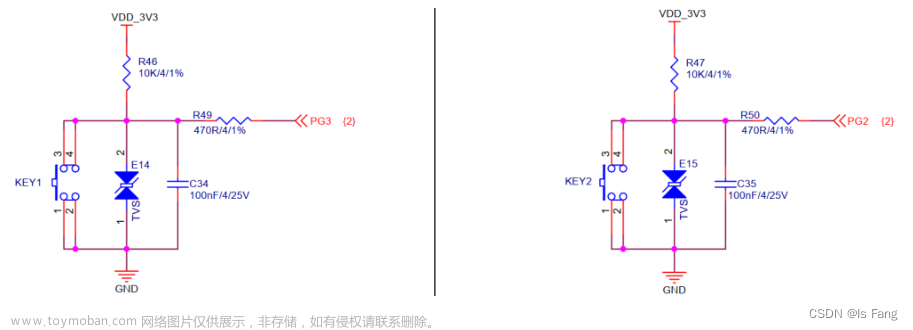
蜂鸣器:TIM4_CH1 === PB6
马达:TIM16_CH1 === PF6
风扇:TIM1_CH1 === PE9
2.实验以蜂鸣器为例
框图

分析:
1,需要分析芯片手册 RCC/GPIO/TIM4章节
2,RCC:使能GPIOB组/TIM4组控制器
3,GPIO:1)设置复用功能, 2)设置复用功能TIM4_CH1
4,TIM4:产生PWM方波信号
三,分析RCC章节
1,确定总线连接
根据Memory and bus architecture 章节中 Memory map and register boundary addresses 篇确定GPIO总线:APB4;TIM总线:APB1
2,根据总线内容确定基地址
RCC: 0x5000 0000
GPIOB:0x5000 3000
TIM4: 0x4000 2000
根据基地址和寄存器的偏移量确定寄存器的地址: 寄存器地址 = 基地址 + 偏移地址
3.分析RCC章节所需寄存器
1,RCC_MP_AHB4ENSETR寄存器
作用:使能GPIOB组控制器
地址:0x5000000 + 0xA28 = 0x50000A28
伪代码:RCC_MP_AHB4ENSETR [1] = 1
2,RCC_MP_APB1ENSETR寄存器
作用:使能TIM4组寄存器
地址:0x5000000 + 0xA00 = 0x50000A00
伪代码:RCC_MP_APB1ENSETR [2] = 1
四,分析GPIO章节寄存器
1,GPIOx_MODER寄存器
作用:设置GPIOB引脚模式为复用功能模式(共四种:输入,输出,复用,模拟)
地址:0x50003000 + 0x00 = 0x50003000
操作:GPIOB_MODER [13:12] = 10
2,GPIOx_AFRL寄存器
作用:设置GPIOB引脚复用功能为TIM4_CH1功能
地址:0x50003000 + 0x20 = 0x50003020
伪代码:GPIOB_AFRL [27:24] = 0010 (复用功能 根据 Pinouts, pin description and alternate functions章节确定要给定的值)
五,分析TIM4章节
1,概述:
1,自动重载计数器,可编程分频器
2,输出方波
3,定时器预分频器,RCC时钟控制器预分频器
4,独立通道
2,特点:

1,16位递增,递减,递增/递减自动重载计数器
2,递增,递减:边沿对齐模式
3,递增/递减:中心对齐模式
计数方式:
例:递增计数器:驱动递增计数器时钟信号,每来一个时钟周期,计数器中的值进行加1操作,加到和递增计数器中的值相等以后,从0开始,开启下一个时钟周期
3.内部框图

1,系统提供时钟源209MHz,通过PSC(prescaler)预分频器分频,分频值为209分频(自定义)
2,定时器启动后,自动重载计数器ARR(Auto-reload register)中的值会自动加载到递减计数器CNT(counter)中
3,时钟信号驱动递减计数器进行工作,一个时钟周期内,计数器中数字连续减1操作,直到减到0后,自动重载计数器(ARR)中的值自动加载到递减计数器中,开启下一个时钟周期
4,捕获 / 比较寄存器 CCR(Capture / Compare 1register)
作用: 1,产生PWM方波
2,当递减计数器(CNT)中的值和捕获比较寄存器(CCR)中的值相等之后,电平会发生翻转
5,分频工作原理

CK_PSC:系统提供的时钟源
CEN:使能信号
Timerclock = CK_CNT:计数器时钟
Counter register :计数器寄存器
Update event(UEV):更新事件
Prescaler control register:预分频控制寄存器
Prescaler buffer:分频器缓冲区
Prescaler counter:分频器计数器
TIMx_CR1寄存器中ARPE的值会影响自动重载计数器加载,=0,立即加载, =1,下一时钟周期加载
6,分析TIM4寄存器
1,分析TIMx_CR1寄存器
作用:初始化寄存器相关操作
地址:0x40002000 + 0x00 = 0x40002000
伪代码:
TIM4_CR1[7] = 1 ==== 设置自动重载预加载寄存器(ARR)使能
TIM4_CR1[6:5] = 00 ==== 边沿对齐模式(CNT采用递减模式,边沿对齐)
TIM4_CR1[4] = 1 ==== 设置计数器CNT设置为递减计数方式
TIM4_CR1[0] = 1 ==== 设置计数器CNT使能
2,分析TIMx_CCMR1寄存器
作用:配置比较捕获寄存器
地址:0x40002000 + 0x18 = 0x40002018
伪操作:TIM4_CCMR1 [16][6:4] = 0110 ==== 设置通道1比较捕获模式为PWM模式
TIM4_CCMR1 [3] = 1 ==== 设置捕获 / 比较寄存器预加载使能
TIM4_CCMR1 [1:0] = 00 ==== 设置输出通道为通道1
3,分析TIMx_CCER寄存器
作用:设置比较捕获寄存器(CCR)默认输出极性
地址:0x40002000 + 0x20 = 0x40002020
伪代码:TIM4_CCER [3][1] = 00 / 01 ==== 设置比较捕获寄存器,默认输出极性高/低电平(自定义)
TIM_CCER [0] = 1 ==== 设置比较捕获寄存器输出使能
4,分析TIMx_PSC寄存器
作用:设置系统时钟分频值
地址:0x40002000 + 0x28 = 0x40002028
伪代码:TIM4_PSC = 209 - 1 (自定义)
5,分析TIMx_ARR寄存器
作用:设置自动重载计数器(ARR)中的的值
地址:0x40002000 + 0x2C = 0x4000202C
伪代码:TIM4_ARR = 1000(自定义)
6,分析TIMx_CCR1寄存器
作用:设置捕获比较器(CCR)中的值
地址:0x40002000 + 0x34 = 0x40002034
伪代码:TIM4_CCR1 = 300(自定义)
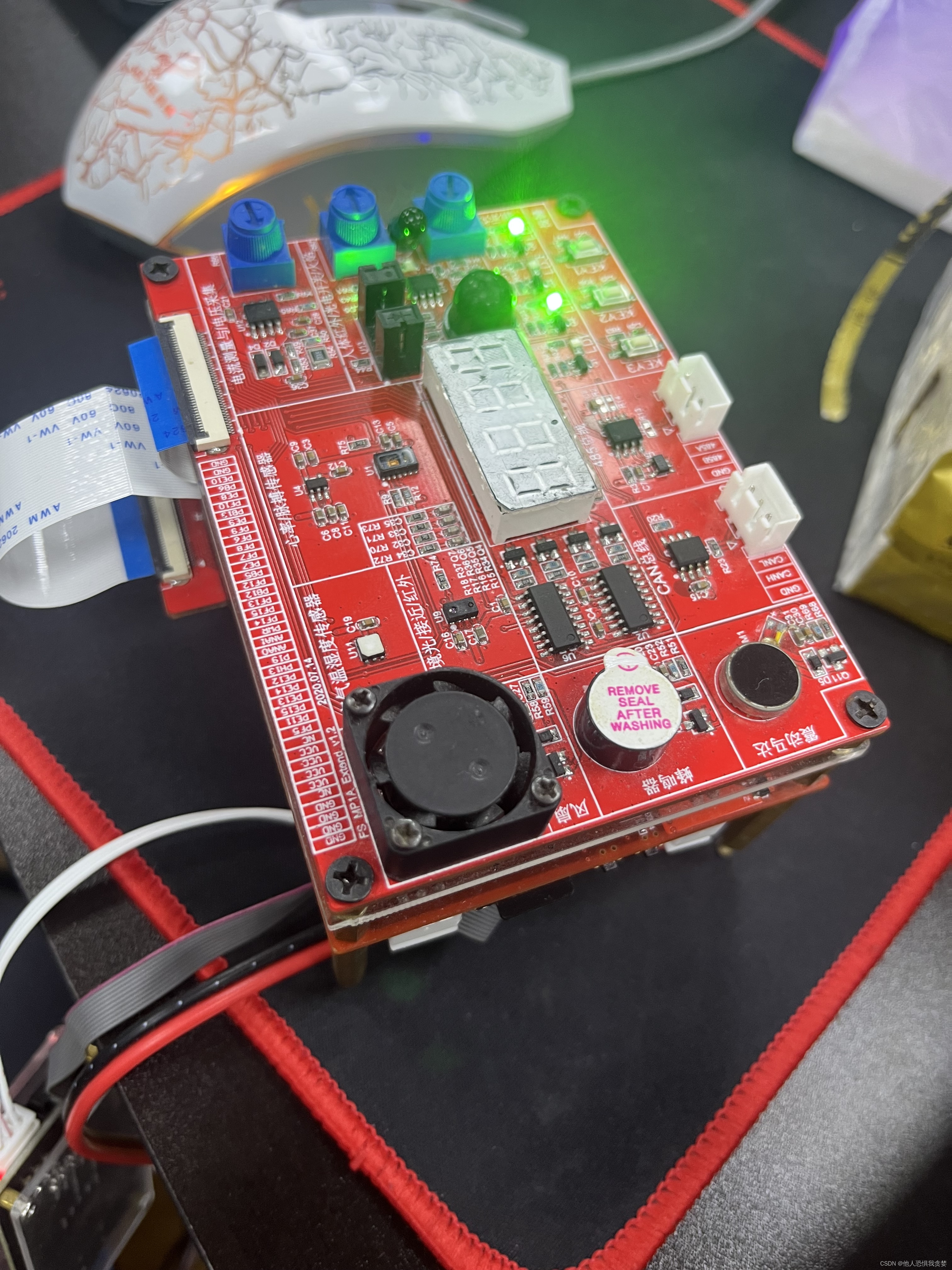
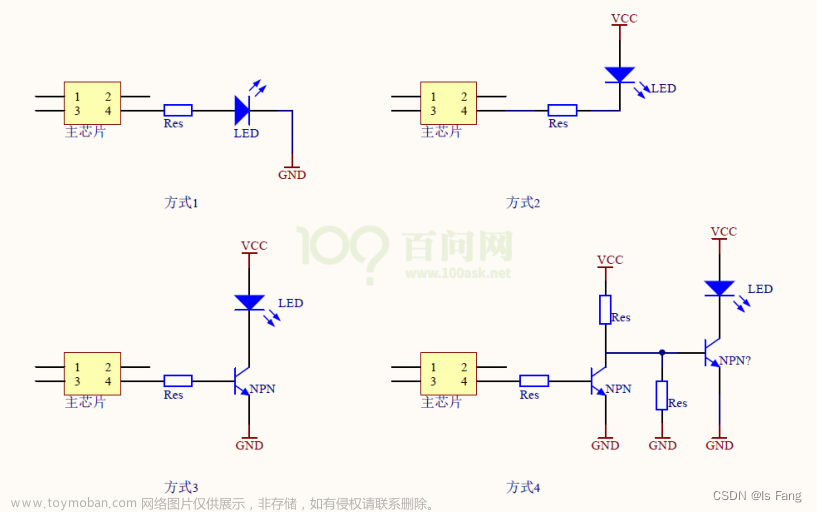
六,风扇,马达
风扇和马达根据网络编号,通道和对应引脚编号更改寄存器中的值即可
另:马达不用设置CR1寄存器边沿对齐模式和递减计数方式
风扇和马达多一个寄存器BDTR
TIMx_BDTR
作用:主输出使能
地址:0x40002000 + 0x44 = 0x40002044文章来源:https://www.toymoban.com/news/detail-681673.html
伪代码:TIMx_BDTR [15] = 1(x根据网络编号)文章来源地址https://www.toymoban.com/news/detail-681673.html
到了这里,关于cortex-A7核PWM实验--STM32MP157的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!