ROS2的humble安装
1、系统配置ubuntu 22.04
- 假如长期使用ros2,建议是ubuntu系统或者双系统下安装操作,不要在虚拟机中进行。
- ubuntu系统能用最新的大系统就用最新的,比如22.04。等明年24.04出来可以用24.04
2、humble安装
- ros版本选择humble版本,比较稳定,各公司用的多一点。
2.1、一键安装
- 利用鱼香ROS的安装指令一键安装即可
wget http://fishros.com/install -O fishros && . fishros
(1) 选择===> 一键安装:ROS(支持ROS和ROS2,树莓派Jetson)
(2) 选择===> 更换系统源再继续安装
(3) 选择===> humble系统
(4) 选择===> humble系统桌面版
接着等待安装即可
ROS2的rosdepc安装
鱼香ros中可以安装另外版本的rosdepc
wget http://fishros.com/install -O fishros && . fishros
选择3,一键配置rosdepc。安装完成后运行rosdepc update
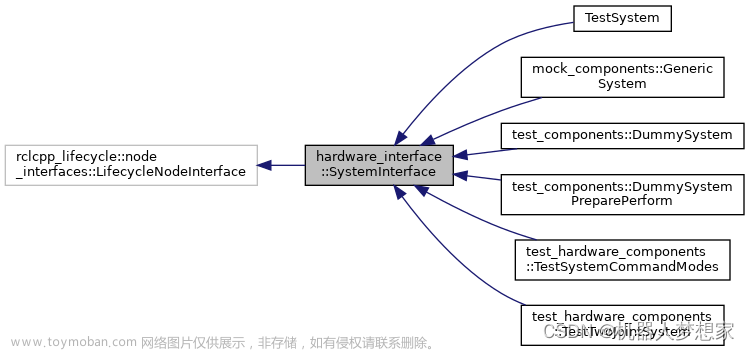
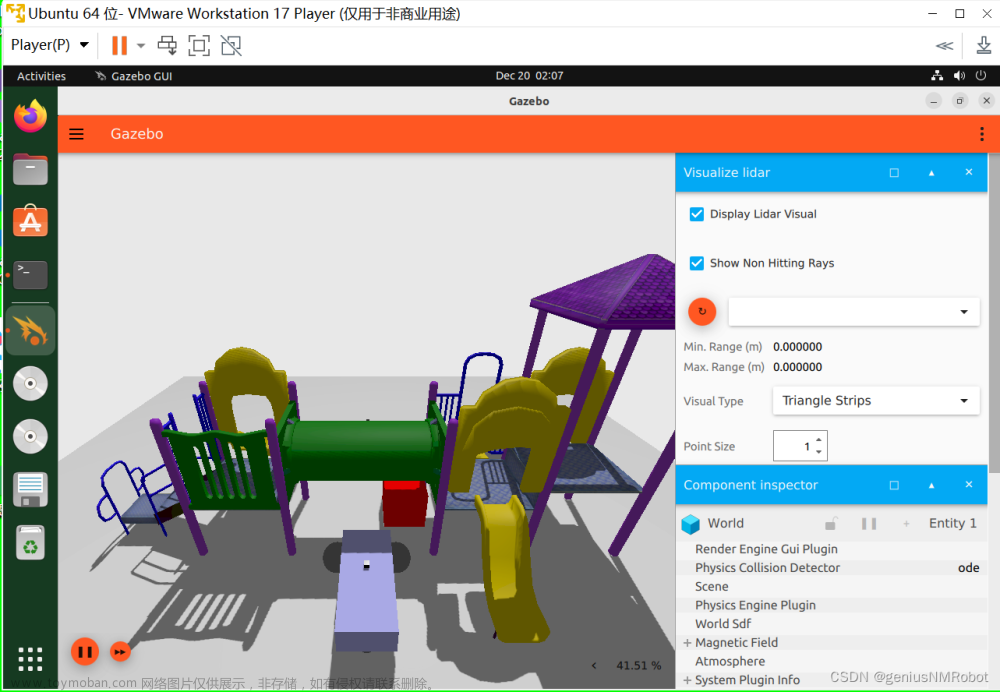
ROS2的cartographer安装
- Cartographer是Google开源的一个跨平台、实时定位与建图系统(SLAM)。它采用的激光传感器可以是2D或3D形式。
- cartographer的github地址
- cartographer_ros的github地址
- cartographer的参考文档地址
- cartographer_ros的参考文档地址
cartographer的安装方式有两种:apt安装和源码安装。推荐源码安装,便于查看和修改源码。文章来源:https://www.toymoban.com/news/detail-683340.html
1、源码安装
- 创建工作空间
mkdir -p carto_ws/src && cd carto_ws/src
- 克隆代码
git clone https://ghproxy.com/https://github.com/ros2/cartographer.git -b ros2
git clone https://ghproxy.com/https://github.com/ros2/cartographer_ros.git -b ros2
- 安装依赖
cd ~/carto_ws
rosdepc install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
- 编译
colcon build --packages-up-to cartographer_ros
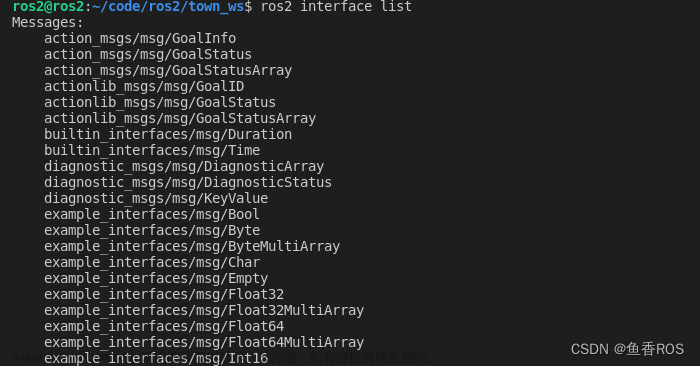
- 验证是否成功
source install/setup.bash
ros2 pkg list | grep cartographer
显示内容如下文章来源地址https://www.toymoban.com/news/detail-683340.html
cartographer_ros
cartographer_ros_msgs
到了这里,关于木叶飞舞之【机器人ROS2】篇章_第一节、ROS2 humble及cartorgrapher安装的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!