背景
这里为什么要写串口通信,因为实际项目上使用了串口,STM8S003F3P6的串口简单啊,不值得一提。本文写的串口确实简单,因为这里我想先从简单的写起来,慢慢的把难的引出来。这里呢,做个提纲说明,本文涉及的串口,是使用STM8S003F3P6片上的IO模拟串口。由于STM8S003F3P6资源有限,双机通信资源时常不够,下篇文章提出用IO模拟串口的方式进行数据收发。
IO模拟串口还是有一定的难度的,调试起来非常消耗时间,我记得这里我调试了一个多星期。需要对串口时序的理解比较深刻,才可以调试,如果对串口的时序还不清楚,那看代码会一头雾水。
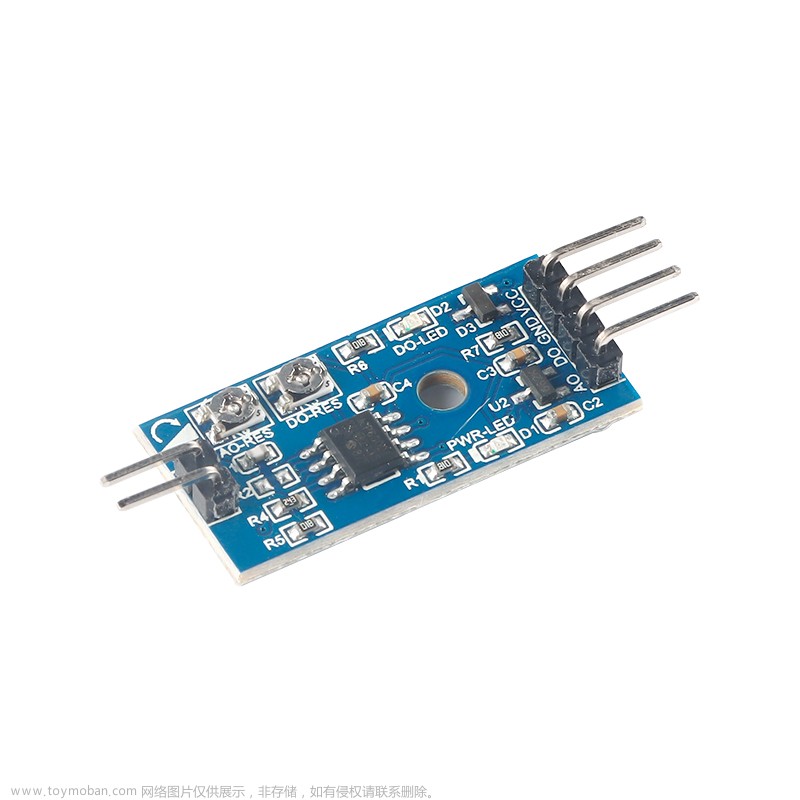
原理图

如上图这里是STM8S003F3P6的串口
当然这里标题说的串口的双机通信,也可以是指别的单片机或者直接对应电脑的串口
有人会说,哎,你这里么有把串口TTL电平转换为RS232或者其他电平。
是的,这里确实没有,这里可以通过上图中的CN2连接 TTL转USB的小模块,接入电脑或者笔记本进行调试。
软件设计
系统主频设置,采用内部时钟16M,即HSI 1分频
这里必须提一下时钟,因为,串口的波特率有个延时,延时时间是和主频有很密切的关联
/************************************************
函数名称 : CLK_Configuration
功 能 : 时钟配置
参 数 : 无
返 回 值 : 无
作 者 :
*************************************************/
void CLK_Configuration(void)
{
/*
ErrorStatus clk_return_status;
CLK_HSIPrescalerConfig(CLK_PRESCALER_HSIDIV8); //HSI = 16M (8分频)=2MHZ
//切换内部低速时钟128khz
clk_return_status = CLK_ClockSwitchConfig(CLK_SWITCHMODE_AUTO, CLK_SOURCE_LSI, DISABLE, CLK_CURRENTCLOCKSTATE_DISABLE);
if (clk_return_status == SUCCESS) //SUCCESS or ERROR
{
CLK_ClockSwitchCmd(ENABLE);
CLK_LSICmd(ENABLE);
CLK_ClockSwitchCmd(DISABLE);
}*/
// CLK_HSIPrescalerConfig(CLK_PRESCALER_HSIDIV1); //HSI = 16M (1分频)
//ErrorStatus clk_return_status;
CLK_HSIPrescalerConfig(CLK_PRESCALER_HSIDIV1); //HSI = 16M (8分频)=2MHZ
/*
//切换内部低速时钟8M
clk_return_status = CLK_ClockSwitchConfig(CLK_SWITCHMODE_AUTO, CLK_SOURCE_HSE, DISABLE, CLK_CURRENTCLOCKSTATE_DISABLE);
if (clk_return_status == SUCCESS) //SUCCESS or ERROR
{
CLK_ClockSwitchCmd(ENABLE);
CLK_HSECmd(ENABLE);
CLK_ClockSwitchCmd(DISABLE);
}*/
CLK_DeInit();//设置为默认值
CLK_HSICmd(ENABLE);//启用HSI
CLK_HSIPrescalerConfig(CLK_PRESCALER_HSIDIV1);//HSI分频
CLK_SYSCLKConfig(CLK_PRESCALER_CPUDIV1);//CPU分频
}串口初始化配置
这里配置,如原理图所示
PC4为串口的发送管脚,配置为输出
PC5为串口的接收管脚,配置为输入中断
void IO_UART_init(void)
{
vm_UART_RX_O = 0;
vm_UART_RX_P = 0;
memset(vm_UART_RX_BUF, 0 ,sizeof(vm_UART_RX_BUF));
//VM_UART_TXD_PORT_IN;//发送初始化
//外部中断
///EXTI_CR1 &=~(3<<4);//清零///这里源程序针对PC管脚配置外部中断,需要修改PB管脚即可
///EXTI_CR1 |=2<<4;//下降沿触发
VM_UART_TXD_PORT_OUT;
VM_UART_RXD_PORT_INT_IN;//接收初始化
EXTI_CR1 &=~(3<<4);//清零//这里需要修改为PC管脚
//EXTI_CR1 |=3<<2;//上升沿和下降沿触发
EXTI_CR1 |=2<<4;//下降沿触发
}
涉及的宏定义如下
#define PC_ODR (GPIOC->ODR)
#define PC_IDR (GPIOC->IDR)
#define PC_DDR (GPIOC->DDR)
#define PC_CR1 (GPIOC->CR1)
#define PC_CR2 (GPIOC->CR2)
#define PB_ODR (GPIOC->ODR)
#define PB_IDR (GPIOC->IDR)
#define PB_DDR (GPIOC->DDR)
#define PB_CR1 (GPIOC->CR1)
#define PB_CR2 (GPIOC->CR2)
#define EXTI_CR1 (EXTI->CR1)
#define TIM2_CR1 (TIM2->CR1)
#define TIM2_IER (TIM2->IER)
#define TIM2_SR1 (TIM2->SR1)
#define TIM2_SR2 (TIM2->SR2)
#define TIM2_EGR (TIM2->EGR)
#define TIM2_CCMR1 (TIM2->CCMR1)
#define TIM2_CCMR2 (TIM2->CCMR2)
#define TIM2_CCMR3 (TIM2->CCMR3)
#define TIM2_CCER1 (TIM2->CCER1)
#define TIM2_CCER2 (TIM2->CCER2)
#define TIM2_CNTRH (TIM2->CNTRH)
#define TIM2_CNTRL (TIM2->CNTRL)
#define TIM2_PSCR (TIM2->PSCR)
#define TIM2_ARRH (TIM2->ARRH)
#define TIM2_ARRL (TIM2->ARRL)
#define TIM2_CCR1H (TIM2->CCR1H)
#define TIM2_CCR1L (TIM2->CCR1L)
#define TIM2_CCR2H (TIM2->CCR2H)
#define TIM2_CCR2L (TIM2->CCR2L)
#define TIM2_CCR3H (TIM2->CCR3H)
#define TIM2_CCR3L (TIM2->CCR3L)
#define TIM1_CR1 (TIM1->CR1)
#define TIM1_CR2 (TIM1->CR2)
#define TIM1_SMCR (TIM1->SMCR)
#define TIM1_ETR (TIM1->ETR)
#define TIM1_IER (TIM1->IER)
#define TIM1_SR1 (TIM1->SR1)
#define TIM1_SR2 (TIM1->SR2)
#define TIM1_EGR (TIM1->EGR)
#define TIM1_CCMR1 (TIM1->CCMR1)
#define TIM1_CCMR2 (TIM1->CCMR2)
#define TIM1_CCMR3 (TIM1->CCMR3)
#define TIM1_CCMR4 (TIM1->CCMR4)
#define TIM1_CCER1 (TIM1->CCER1)
#define TIM1_CCER2 (TIM1->CCER2)
#define TIM1_CNTRH (TIM1->CNTRH)
#define TIM1_CNTRL (TIM1->CNTRL)
#define TIM1_PSCRH (TIM1->PSCRH)
#define TIM1_PSCRL (TIM1->PSCRL)
#define TIM1_ARRH (TIM1->ARRH)
#define TIM1_ARRL (TIM1->ARRL)
#define TIM1_RCR (TIM1->RCR)
#define TIM1_CCR1H (TIM1->CCR1H)
#define TIM1_CCR1L (TIM1->CCR1L)
#define TIM1_CCR2H (TIM1->CCR2H)
#define TIM1_CCR2L (TIM1->CCR2L)
#define TIM1_CCR3H (TIM1->CCR3H)
#define TIM1_CCR3L (TIM1->CCR3L)
#define TIM1_CCR4H (TIM1->CCR4H)
#define TIM1_CCR4L (TIM1->CCR4L)
#define TIM1_BKR (TIM1->BKR)
#define TIM1_DTR (TIM1->DTR)
#define TIM1_OISR (TIM1->OISR)
#define TIM4_CR1 (TIM4->CR1)
#define TIM4_IER (TIM4->IER)
#define TIM4_SR1 (TIM4->SR1)
#define TIM4_EGR (TIM4->EGR)
#define TIM4_CNTR (TIM4->CNTR)
#define TIM4_PSCR (TIM4->PSCR)
#define TIM4_ARR (TIM4->ARR)
#define TIM1_timer 1667 //接收定时器
#define TIM2_timer 1667 //发送定时器
//#define TIM1_timer 139 //接收定时器
//#define TIM2_timer 139 //发送定时器
#define vm_UART_RX_BUF_L 32//接收缓存长度
#define TIM2_START TIM2_CNTRL = 0;TIM2_CNTRH = 0;TIM2_CR1|= 1<<0 //计数器置零,启动定时器2
#define TIM2_STOP TIM2_CR1 &= (~1<<0) //停止定时器
#define TIM1_START TIM1_CNTRL = 0;TIM1_CNTRH = 0;TIM1_CR1 |= 1<<0 //计数器置零,启动定时器1
#define TIM1_STOP TIM1_CR1 &= ~(1<<0) //停止定时器
#define VM_UART_TXD_PORT_WriteHigh PC_ODR|= 1<<4 //高电平
#define VM_UART_TXD_PORT_WriteLow PC_ODR &=~(1<<4) //低电平
#define VM_UART_TXD_PORT_OUT PC_DDR|=1<<4 ;PC_CR1|=(1<<4 );PC_CR2 &=~(1<<4)//设定为输出
#define VM_UART_TXD_PORT_IN PC_DDR&=~(1<<4 );PC_CR1|=(1<<4 );PC_CR2&=~(1<<4 )//设定为输入
#define VM_UART_RXD_PORT_IN PB_DDR&=~(1<<5);PB_CR1|=(1<<5);PB_CR2&=~(1<<5) //设置只上拉输入 不中断
#define VM_UART_RXD_PORT_INT_IN PB_DDR&=~(1<<5);PB_CR1|=(1<<5);PB_CR2|=(1<<5) //设置只上拉输入 中断
采用定时器4为串口的接收扫描函数
总的来说,串口的发送比较简单,只需要将PC4管脚,按照串口的时序拉高拉低即可
但是串口接收就比较麻烦
这里首先解释一下接收思路
就是开启一个定时器不停的扫描串口接收管脚PC5,然后将扫描的数据进行提取,获取最终的接收数据。
/* TIM4 configuration:
- TIM4CLK is set to 16 MHz, the TIM4 Prescaler is equal to 128 so the TIM1 counter
clock used is 16 MHz / 128 = 125 000 Hz
- With 125 000 Hz we can generate time base:
max time base is 2.048 ms if TIM4_PERIOD = 255 --> (255 + 1) / 125000 = 2.048 ms
min time base is 0.016 ms if TIM4_PERIOD = 1 --> ( 1 + 1) / 125000 = 0.016 ms
- In this example we need to generate a time base equal to 1 ms
so TIM4_PERIOD = (0.001 * 125000 - 1) = 124 */
void Tim4_Init(void)
{
TIM4_DeInit();
//TIM4_TimeBaseInit(TIM4_PRESCALER_32, 52);
///TIM4_TimeBaseInit(TIM4_PRESCALER_8, 208);
TIM4_TimeBaseInit(TIM4_PRESCALER_8, 208);
///TIM4_TimeBaseInit(TIM4_PRESCALER_16, 21);//提升5倍采样率,没有用
//TIM4_TimeBaseInit(TIM4_PRESCALER_32, 208);
TIM4_ClearFlag(TIM4_FLAG_UPDATE); //清除标志位
TIM4_ARRPreloadConfig(ENABLE);
TIM4_ITConfig(TIM4_IT_UPDATE, ENABLE); //使能更新UPDATE中断
/* Enable TIM4 */
TIM4_Cmd(DISABLE);
}
串口接收数据实现
首先串口接收管脚捕获到中断,启动定时器4
如下图所示,所有接收故事就由此开始
这里首先将PC5管脚配置为输入模式,清空一些变量,启动定时器4
/**
* @brief External Interrupt PORTC Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTC_IRQHandler, 5)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
//外中断一次收一个字节,只识别起始位
if((PB_IDR &0x20) == 0)
{
VM_UART_RXD_PORT_IN; //只上拉输入 不中断
vm_uart_rx_flag = 1;//开启发送
vm_UART_RX_byte = 0;
vm_UART_RX_bit = 0;
//TIM1_START;//启动定时器
TIM4_CNTR = 0;//清零计数器
TIM4_CR1|= 1<<0;//启动定时器
}
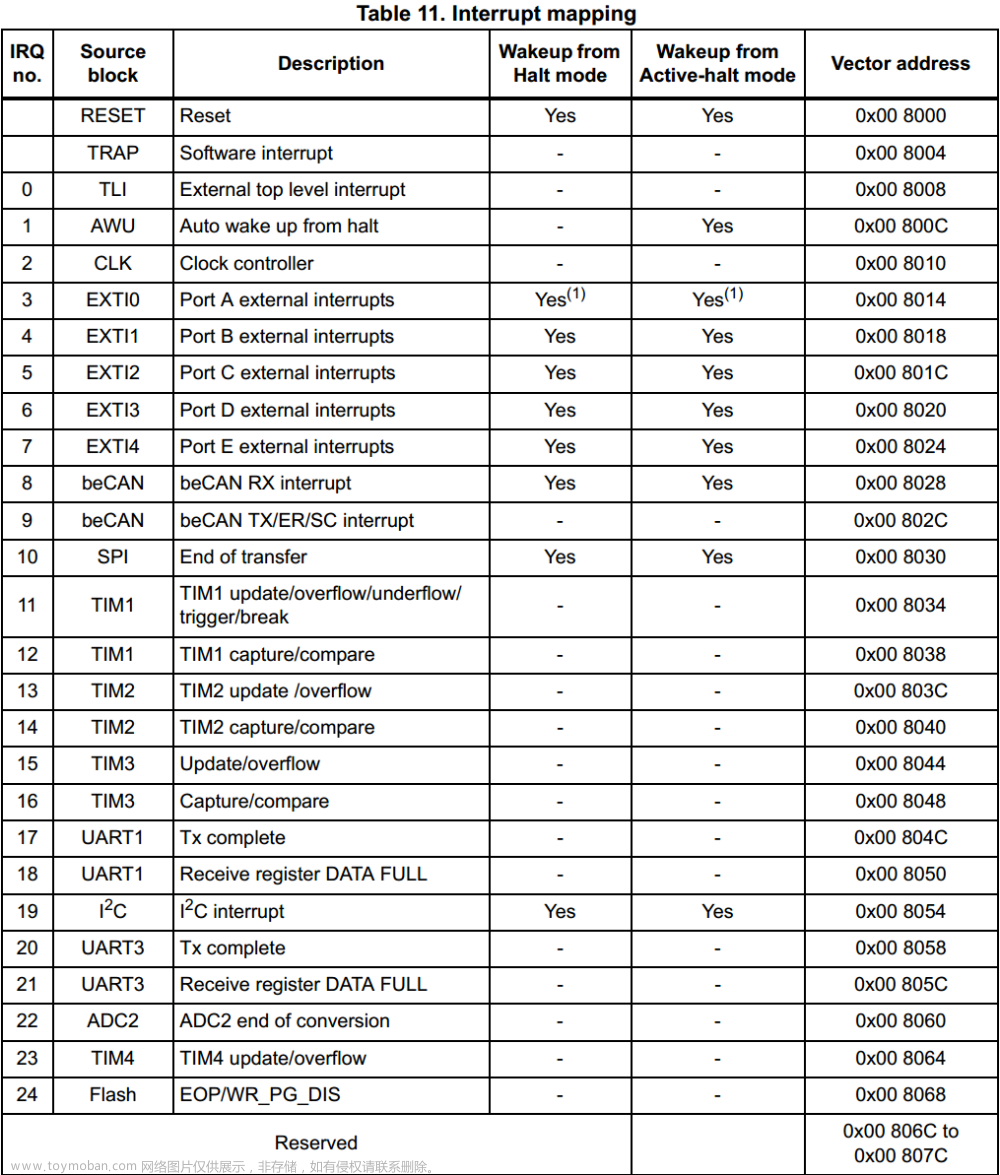
}定时器4的中断函数函数如下
定时器4的中断函数就是不停的扫描PC5管脚,从中获取串口数据,这里就需要对串口时序有一定的认识
/**
* @brief Timer4 Update/Overflow Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM4_UPD_OVF_IRQHandler, 23)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
TIM4_SR1&=~(1<<0);//清空标志位
if((PB_IDR &0x20) == 0)
{
vm_UART_RX_byte /= 2;
}
else
{
vm_UART_RX_byte /= 2;
vm_UART_RX_byte |= 0X80;
}
vm_UART_RX_bit++;
if(vm_UART_RX_bit >= 8)
{
//GPIO_WriteReverse(GPIOB, GPIO_PIN_4);//高取反,低取高,必须配置为输出
///(uint8_t)PC_ODR_ODR4>0?0:1;//高取反,低取高,必须配置为输出
//TIM4_STOP;//停止定时器
TIM4_CR1 &= ~(1<<0);
VM_UART_RXD_PORT_INT_IN;
vm_uart_rx_flag = 0;
vm_UART_RX_bit = 0;//
//if(((vm_UART_RX_P + 1) & (vm_UART_RX_BUF_L - 1)) != vm_UART_RX_O)
{
vm_UART_RX_BUF[vm_UART_RX_P] = vm_UART_RX_byte; //一个字节时接收完毕
vm_UART_RX_P++;
vm_UART_RX_P &= (vm_UART_RX_BUF_L - 1);
}
}
}串口发送函数文章来源:https://www.toymoban.com/news/detail-687723.html
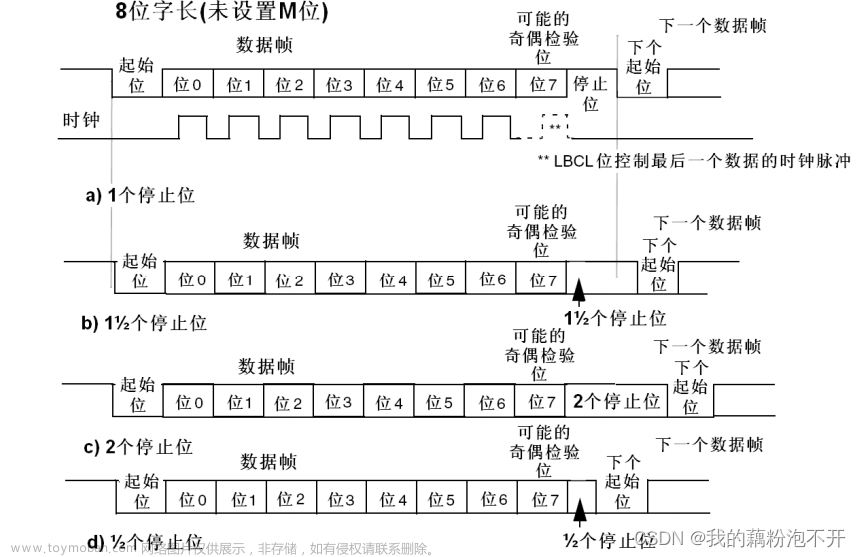
根据波形做对应延时,拉出来对应的时序即可文章来源地址https://www.toymoban.com/news/detail-687723.html
//发送一个字节
//以stm8中9600bit/s的波特率计算的过程为例(1秒钟传输9600位)。
//可以计算出传输1位所需要的时间 T1 = 1/9600 约为104us。
void WriteByte( unsigned char sdata ) //波特率9600
{
//如果数据误码率比较高,可以修改delay_us延时时间
unsigned char i;
unsigned char value = 0;
VM_UART_TXD_PORT_OUT;
//发送起始位
Send_0();
delay_us( DELAY_CNT );
//发送数据位
for( i = 0; i < 8; i++ )
{
value = ( sdata & 0x01 ); //先传低位
if( value )
{
Send_1();
}
else
{
Send_0();
}
delay_us( DELAY_CNT ); //经测试延时100us 数据没有误差 示波器上观察波形时间为104us左右
sdata = sdata >> 1;
}
//停止位
Send_1();
delay_us( DELAY_CNT );
VM_UART_TXD_PORT_WriteHigh;
///VM_UART_TXD_PORT_IN;
}
//发送字符串
void WriteString( unsigned char *s )
{
while( *s != 0 )
{
WriteByte( *s );
//vm_UARTsend_byte(*s);
s++;
}
}到了这里,关于STM8、STM8S003F3P6 双串口通信(IO模拟串口)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!