上一篇 文章中我们实现了 ProposalLayer 层, 它将的功能是输出建议区域矩形. 本文要实现另一个自定义层 RoiPoolingLayer. 在 Faster R-CNN 中, RoiPooling 层的目的是将不同大小的感兴趣区域(Region of Interest, ROI) 转换为固定大小的特征图作为后续步骤的输入
一 RoI 区域
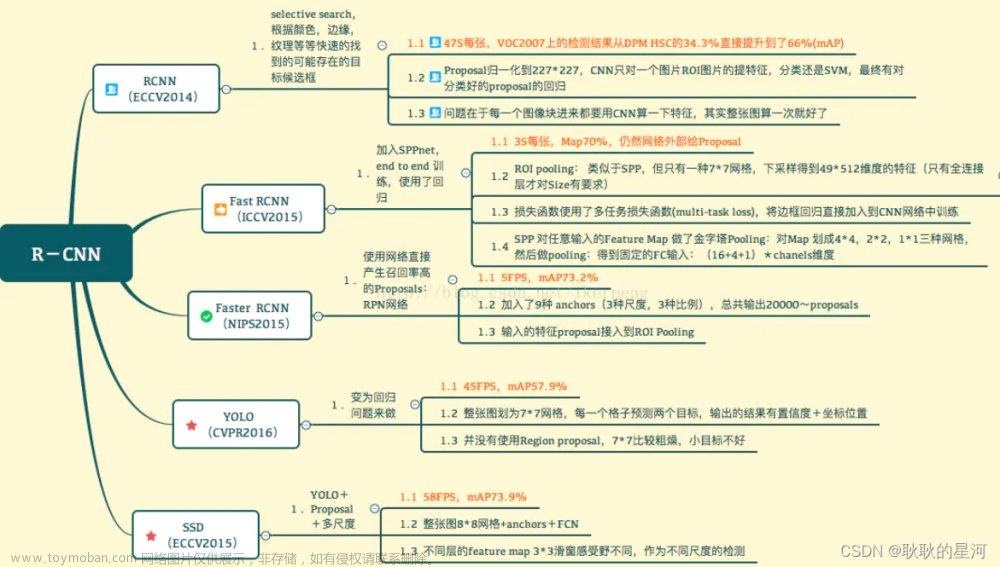
还是先把论文中的图贴出来

上图中已经标明了 RoI pooling 的位置, 个人觉得这张图是有问题的. 依据如下
- 图中 feature maps 的尺寸应该远比输入的图像的尺寸要小才对. 当然这个也不是问题, 可能是为了方便作图故意把输入图像画得比较小
- proposals 中的框和 RoI pooling 位置特征图中的框一样大. 这个是有问题的, 因为 RPN 输出的是建议框, 是 anchor_box 经过修正再做 NMS 后的矩形. 也是替代 Selective Search 区域的矩形. 建议框的坐标系是原图, 也就是说 proposals 位置的红框的尺寸要和原图一样大才对. 而 RoI pooling 需要将建议框缩放到 feature maps 尺度以 feature maps 为坐标系. 所以图中两处框的大小应该是不一样的
有了上面的解释后, 相信理解 RoiPooling 会相对容易一点
二. 定义 RoiPoolingLyaer
Keras 自定义层的套路在 保姆级 Keras 实现 Faster R-CNN 十 中已经讲过了, 这里就不那么细致的解释了. 不完全定义如下, 后面慢慢补全
class RoiPoolingLayer(Layer):
def __init__(self, pool_size = (7, 7), **kwargs):
self.pool_size = pool_size
super(RoiPoolingLayer, self).__init__(**kwargs)
def build(self, input_shape):
super(RoiPoolingLayer, self).build(input_shape)
def call(self, inputs):
pass
def compute_output_shape(self, input_shape):
pass
在上面的定义中, 需要一个初始化参数 pool_size, 指明我们需要将输出变形到什么样的尺寸. 默认是 ( 7 , 7 ) (7, 7) (7,7), 你要喜欢其他数字也可以
1. call 函数
我们要在 call 函数中实现 RoI pooling 的功能. 不用那么复杂, 再弄简单一点, 只需要一个 裁切 + 变形缩放 的功能
先秀代码, 下面再解释
def call(self, inputs):
images, features, rois = inputs
image_shape = tf.shape(images)[1: 3]
feature_shape = tf.shape(features)
roi_shape = tf.shape(rois)
batch_size = feature_shape[0]
num_rois = roi_shape[1]
feature_channels = feature_shape[3]
y_scale = 1.0 / tf.cast(image_shape[0] - 1, dtype = tf.float32)
x_scale = 1.0 / tf.cast(image_shape[1] - 1, dtype = tf.float32)
y1 = rois[..., 0] * y_scale
x1 = rois[..., 1] * x_scale
y2 = rois[..., 2] * y_scale
x2 = rois[..., 3] * x_scale
rois = tf.stack([y1, x1, y2, x2], axis = -1)
# 为每个 roi 分配对应 feature 的索引序号
indices = tf.range(batch_size, dtype = tf.int32)
indices = tf.repeat(indices, num_rois, axis = -1)
rois = tf.reshape(rois, (-1, roi_shape[-1]))
crops = tf.image.crop_and_resize(image = features,
boxes = rois,
box_indices = indices,
crop_size = self.pool_size,
method = "bilinear")
crops = tf.reshape(crops,
(batch_size, num_rois,
self.pool_size[0], self.pool_size[1], feature_channels))
return crops
对于变量的定义, 从名字就可以理解其意思. inputs 是一个列表, 有三个元素, 一个是原图, 二是特征图, 三是建议框. 这样的话, 就可以拆分成 image, feature_map, rois
那为什么需要 image 这个参数呢, 有了这个参数就可以动态的获取输入图像的尺寸. 从而适应输入图像大小变化的情况. 还有一个主要的原因是要将建议框缩小到特征图的尺度, 需要计算一个缩小的倍数, 在代码中有两个倍数, 分别是 y_scale 与 x_scale
两个计算式都有在图像尺寸上减 1, 这是为什么?
因为我们要将建议框坐标归一化到 [ 0 , 1 ] [0, 1] [0,1] 的范围, 从而在特征图上的坐标也是 [ 0 , 1 ] [0, 1] [0,1] 的范围. 这样并不能解释为什么要减 1. 举个具体数字的例子, 假设输入图像的尺寸是 ( 350 , 400 ) (350, 400) (350,400), 有一个建议框的坐标是 ( 200 , 349 , 300 , 399 ) (200, 349, 300, 399) (200,349,300,399), 坐标顺序是 ( y 1 , x 1 , y 2 , x 2 ) (y_1, x_1, y_2, x_2) (y1,x1,y2,x2), 因为坐标是从 0 开始的, 所以最大坐标到不了 350 和 400. 那归一化后最大坐标就不能取到 1. 将图像尺寸减 1 后, 最大坐标就是 349 与 399, 这样就可以取到 [ 0 , 1 ] [0, 1] [0,1] 范围
代码中将建议框各坐标乘以相应的缩小的倍数怎么可以将建议框坐标缩小到特征图的尺度并且还是 [ 0 , 1 ] [0, 1] [0,1] 的范围呢呢, 也是一样用刚才的例子
缩小倍数:
y
s
c
a
l
e
=
1
/
349
=
0.0028653
x
s
c
a
l
e
=
1
/
399
=
0.0025062
\begin{aligned} y_{scale} = 1 / 349 = 0.0028653 \\ x_{scale} = 1 / 399 = 0.0025062 \end{aligned}
yscale=1/349=0.0028653xscale=1/399=0.0025062
在原图上的归一化坐标:
y 1 = 200 ∗ y s c a l e = 200 ∗ 0.0028653 = 0.57306590 y 2 = 349 ∗ y s c a l e = 349 ∗ 0.0028653 = 0.99999999 x 1 = 300 ∗ x s c a l e = 300 ∗ 0.0025062 = 0.75187969 x 2 = 399 ∗ x s c a l e = 399 ∗ 0.0025062 = 0.99999999 \begin{aligned} y_1 = 200 * y_{scale} = 200 * 0.0028653 = 0.57306590 \\ y_2 = 349 * y_{scale} = 349 * 0.0028653 = 0.99999999 \\ \\ x_1 = 300 * x_{scale} = 300 * 0.0025062 = 0.75187969 \\ x_2 = 399 * x_{scale} = 399 * 0.0025062 = 0.99999999 \\ \end{aligned} y1=200∗yscale=200∗0.0028653=0.57306590y2=349∗yscale=349∗0.0028653=0.99999999x1=300∗xscale=300∗0.0025062=0.75187969x2=399∗xscale=399∗0.0025062=0.99999999
特征图相对于原图缩小了 16 倍, 所以要计算建议框在特征图上映射的坐标(此时还没有归一化), 可以按下面的计算式
y 1 = 200 / / 16 = 12 y 2 = 349 / / 16 = 21 x 1 = 300 / / 16 = 18 x 2 = 399 / / 16 = 24 \begin{aligned} y_1 = 200 // 16 = 12 \\ y_2 = 349 // 16 = 21 \\ \\ x_1 = 300 // 16 = 18 \\ x_2 = 399 // 16 = 24 \\ \end{aligned} y1=200//16=12y2=349//16=21x1=300//16=18x2=399//16=24
现在将其归一化, 在此之前先要计算特征图的尺寸, 这个也简单
h = 350 / / 16 = 21 w = 400 / / 16 = 25 \begin{aligned} h = 350 // 16 = 21 \\ w = 400 // 16 = 25 \\ \end{aligned} h=350//16=21w=400//16=25
归一化的坐标如下
y 1 = 12 / 21 = 0.57142857 y 2 = 21 / 21 = 1.00000000 x 1 = 18 / 25 = 0.72000000 x 2 = 24 / 25 = 0.96000000 \begin{aligned} y_1 = 12 / 21 = 0.57142857 \\ y_2 = 21 / 21 = 1.00000000 \\ \\ x_1 = 18 / 25 = 0.72000000 \\ x_2 = 24 / 25 = 0.96000000 \\ \end{aligned} y1=12/21=0.57142857y2=21/21=1.00000000x1=18/25=0.72000000x2=24/25=0.96000000
和在原图归一化后的坐标相比, 是很接近了, 误差源于原图不是 16 的整数倍, 会有舍入误差
为什么要将坐标归一化, 原来的坐标不好吗?
原来的坐标也不是不好, 只是不方便函数并行统一的操作. 还有一个根本的原因是我们要使用 TensorFlow 提供的函数 tf.image.crop_and_resize, 这个函数的参数就是这样规定的, 你不按规定来就得不到正确的结果
既然提到了 tf.image.crop_and_resize, 就有必要解释一下函数的各个参数. 函数原型如下
tf.image.crop_and_resize(
image,
boxes,
box_indices,
crop_size,
method = "bilinear",
extrapolation_value = 0.0,
name = None
)
- image: 输入图像, 这里是特征图, 形状为 [batch_size, height, width, channels]
- boxes: 一个浮点型的 Tensor, 形状为 [num_boxes, 4], 表示每个 RoI 区域的边界框坐标. 每个边界框的坐标是一个四元组 ( y 1 , x 1 , y 2 , x 2 ) (y_1, x_1, y_2, x_2) (y1,x1,y2,x2), 其中 ( y 1 , x 1 ) (y_1, x_1) (y1,x1) 是左上角的坐标, ( y 2 , x 2 ) (y_2, x_2) (y2,x2) 是右下角的坐标. 坐标值应在 0 到 1 之间
- box_indices: 一个整型的 Tensor, 形状为 [num_boxes], 表示每个 RoI 区域所属的样本索引, 也就是当前的 RoI 区域对应一个 batch 中的哪一张图像(在这里是特征图). 一个 RoI 区域就要对应一个索引. 再说白一点, 就是告诉模型, 对于当前的这个建议框, 你要去哪张图上面将其抠出来
- crop_size: 一个整型的元组, 表示裁剪后的大小, 形状为 [crop_height, crop_width]
- method: 缩放时的插值方式
- extrapolation_value: 一个浮点数, 表示当裁剪的位置超出输入图像范围(也就是坐标值大于了图像尺寸)时, 使用的填充值. 默认值为 0. 比如特征图的尺寸是 ( 18 , 25 ) (18, 25) (18,25), 你要裁切的矩形是 ( 14 , 19 , 15 , 26 ) (14, 19, 15, 26) (14,19,15,26), 那超过特征图的那些位置就要填充
- name: 操作的名称
理解了各参数的意义之后, 上面的代码就容易理解了, 可能有一点蒙的是下面这一段代码
# 为每个 roi 分配对应 feature 的索引序号
indices = tf.range(batch_size, dtype = tf.int32)
indices = tf.repeat(indices, num_rois, axis = -1)
rois = tf.reshape(rois, (-1, roi_shape[-1]))
这一段的功能是为每个 roi 分配对应 feature 的索引序号, ProposalLyaer 输出的建议框的坐标, 形状是 [batch_size, num_rois, 4], 这些建议框个数在一个 batch 内的图像之间是平均分配的. 0 ~ num_rois - 1 的序号对就第一张图, num_rois ~ 2 * num_rois - 1 对应第二张图, 这样类推下去
- indices = tf.range(batch_size, dtype = tf.int32): 产生 0 ~ batch_size - 1 的序列, 比如 batch 为 4, 那序列就是 [ 0 , 1 , 2 , 3 ] [0, 1, 2, 3] [0,1,2,3]. 表示建议框分别对应的图像索引有 0, 1, 2, 3 四张
- indices = tf.repeat(indices, num_rois, -1): 将 0, 1, 2, 3 这些数字重复, 一个序号重复 num_rois 次, 这样就为每一个建议框分配了一个对应于 batch 内特征图的索引序号, 重复后的形式为 [ 0 , 0 , 0 , . . . , 0 , 0 , 0 , 1 , 1 , 1 , . . . , 1 , 1 , 1 , 2 , 2 , 2 , . . . , 2 , 2 , 2 , 3 , 3 , 3 , . . . , 3 , 3 , 3 ] [0, 0, 0, ..., 0, 0, 0, 1, 1, 1, ..., 1, 1, 1, 2, 2, 2, ..., 2, 2, 2, 3, 3, 3, ..., 3, 3, 3] [0,0,0,...,0,0,0,1,1,1,...,1,1,1,2,2,2,...,2,2,2,3,3,3,...,3,3,3]. 这是对应于有规律的情况, 没有规律的话, 你也可以手动指定, 比如 [ 0 , 1 , 2 , 1 , 1 , 2 , . . . , 3 , 1 , 2 ] [0, 1, 2, 1, 1, 2, ..., 3, 1, 2] [0,1,2,1,1,2,...,3,1,2] 这样的. 也不要求各序号数量要相等
- rois = tf.reshape(rois, (-1, roi_shape[-1])): 将 rois 的形状从 [batch_size, num_rois, 4] 变成 tf.image.crop_and_resize 需要的 [num_boxes, 4]
经过上面的一顿操作, tf.image.crop_and_resize 就能正常使用了, 实现了从特征图中将建议框对应的地方抠出来, 变形到 ( 7 , 7 ) (7, 7) (7,7) 的形状, 最后一句
crops = tf.reshape(crops,
(batch_size, num_rois,
self.pool_size[0], self.pool_size[1], feature_channels))
将输出变到能做到 batch 操作的形状
2. compute_output_shape 函数
这个就比较容易了, 指定输出的形状
def compute_output_shape(self, input_shape):
image_shape, feature_shape, roi_shape = input_shape
batch_size = image_shape[0]
num_rois = roi_shape[1]
feature_channels = feature_shape[3]
return (batch_size, num_rois, self.pool_size[0], self.pool_size[1], feature_channels)
这样 RoiPoolingLayer 就完成了, 完整的定义如下
# 定义 RoiPoolingLayer
class RoiPoolingLayer(Layer):
def __init__(self, pool_size = (7, 7), **kwargs):
self.pool_size = pool_size
super(RoiPoolingLayer, self).__init__(**kwargs)
def build(self, input_shape):
super(RoiPoolingLayer, self).build(input_shape)
def call(self, inputs):
images, features, rois = inputs
image_shape = tf.shape(images)[1: 3]
feature_shape = tf.shape(features)
roi_shape = tf.shape(rois)
batch_size = feature_shape[0]
num_rois = roi_shape[1]
feature_channels = feature_shape[3]
y_scale = 1.0 / tf.cast(image_shape[0] - 1, dtype = tf.float32)
x_scale = 1.0 / tf.cast(image_shape[1] - 1, dtype = tf.float32)
y1 = rois[..., 0] * y_scale
x1 = rois[..., 1] * x_scale
y2 = rois[..., 2] * y_scale
x2 = rois[..., 3] * x_scale
rois = tf.stack([y1, x1, y2, x2], axis = -1)
# 为每个 roi 分配对应 feature 的索引序号
indices = tf.range(batch_size, dtype = tf.int32)
indices = tf.repeat(indices, num_rois, axis = -1)
rois = tf.reshape(rois, (-1, roi_shape[-1]))
crops = tf.image.crop_and_resize(image = features,
boxes = rois,
box_indices = indices,
crop_size = self.pool_size,
method = "bilinear")
crops = tf.reshape(crops,
(batch_size, num_rois,
self.pool_size[0], self.pool_size[1], feature_channels))
return crops
def compute_output_shape(self, input_shape):
image_shape, feature_shape, roi_shape = input_shape
batch_size = image_shape[0]
num_rois = roi_shape[1]
feature_channels = feature_shape[3]
return (batch_size, num_rois, self.pool_size[0], self.pool_size[1], feature_channels)
三. 将 RoiPoolingLayer 加入模型
现在把 RoiPoolingLayer 加入到模型如下
# RoiPooling 模型
x = keras.layers.Input(shape = (None, None, 3), name = "input")
feature = vgg16_conv(x)
rpn_cls, rpn_reg = rpn(feature)
proposal = ProposalLayer(base_anchors, num_rois = TRAIN_NUM, iou_thres = 0.7,
name = "proposal")([x, rpn_cls, rpn_reg])
roi_pooling = RoiPoolingLayer(name = "roi_pooling")([x, feature, proposal])
roi_pooling_model = keras.Model(x, roi_pooling, name = "roi_pooling_model")
roi_pooling_model.summary()
有了模型, 就可以测试一下效果了, 不过在之前, 要加载 保姆级 Keras 实现 Faster R-CNN 八 训练好的参数
# 加载训练好的参数
roi_pooling_model.load_weights(osp.join(log_path, "faster_rcnn_weights.h5"), True)
再定义一个预测函数
# roi_pooling 模型预测
# 一次预测一张图像
# x: 输入图像或图像路径
# 返回值: 返回原图像和预测结果
def roi_pooling_predict(x):
# 如果是图像路径, 那要将图像预处理成网络输入格式
# 如果不是则是 input_reader 返回的图像, 已经满足输入格式
if isinstance(x, str):
img_src = cv.imread(x)
img_new, scale = new_size_image(img_src, SHORT_SIZE)
x = [img_new]
x = np.array(x).astype(np.float32) / 255.0
y = roi_pooling_model.predict(x)
return y
# 利用训练时划分的测试集
test_reader = input_reader(test_set, CATEGORIES, batch_size = 4, train_mode = False)
接下来就是见证奇迹的时刻了
# roi_pooling 测试
x, y = next(test_reader)
outputs = roi_pooling_predict(x)
print(x.shape, outputs.shape)
print(outputs)
输出如下
(4, 325, 400, 3) (4, 256, 7, 7, 512)
[[[[[0.00000000e+00 0.00000000e+00 0.00000000e+00 ... 0.00000000e+00
8.52627680e-03 0.00000000e+00]
[0.00000000e+00 0.00000000e+00 0.00000000e+00 ... 0.00000000e+00
3.18351114e-04 0.00000000e+00]
[0.00000000e+00 0.00000000e+00 0.00000000e+00 ... 0.00000000e+00
9.16954782e-03 0.00000000e+00]
...
[0.00000000e+00 0.00000000e+00 0.00000000e+00 ... 0.00000000e+00
2.82486826e-02 0.00000000e+00]
[0.00000000e+00 0.00000000e+00 0.00000000e+00 ... 0.00000000e+00
3.77882309e-02 0.00000000e+00]
[0.00000000e+00 0.00000000e+00 0.00000000e+00 ... 0.00000000e+00
3.84687856e-02 0.00000000e+00]]
可以看到输出的形状对了, 数值对不对以后验证
四. 代码下载
示例代码可下载 Jupyter Notebook 示例代码文章来源:https://www.toymoban.com/news/detail-688920.html
上一篇: 保姆级 Keras 实现 Faster R-CNN 十
下一篇: 保姆级 Keras 实现 Faster R-CNN 十二文章来源地址https://www.toymoban.com/news/detail-688920.html
到了这里,关于保姆级 Keras 实现 Faster R-CNN 十一的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!