第一章:需求与配置
一。项目需求
智能终端(应该是上位机)通过互联网发指令给中控主机,中控主机(stm32)接受到指令后再以无线形式对节点发出命令。
1.利用Zigbee实现教室内,无线传感网络搭建,对接环境传感器,教室内风扇,空调,灯,报警等装置
2.利用STM32实现Zigbee网关设计,运行触摸屏界面,嵌入式Web服务器

二。实现外设控制
注意:
先配置引脚,再配置外设。否则会出现一些不可预料的问题
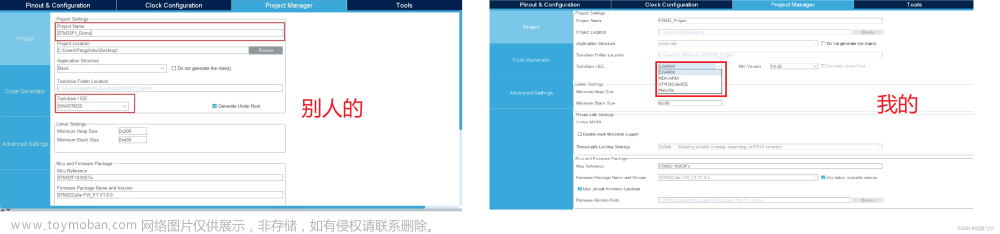
1.时钟,串口,灯,蜂鸣器配置
(1)RCC配置为外部时钟,修改时钟参数


(2)SWD配置:为了不引脚冲突,使用

(3)串口的使用(USART1,USART3)
<1>USART1
注意:大型项目串口使用中断,因为效率高


<2>USART3
串口3没有使用中断,观察原理图,使用串口母口与电脑通信。

(4)GPIO配置
1.GPIO灯的配置,设置为高电平(初始为灭)
2.GPIO蜂鸣器配置,设置为低电平(初始不响)

(5)LCD的FMSC配置

FMSC的LCD2配置,这是显示页面

(6)GPIO补充配置

(7)SPI的配置
PA5配置spi_sck

配置PB5,PB4

配置PH2为GPIO_OUTPUT

spi配置全双工

(8)Touch配置
设置SPi2,注意:PG15为高电平


设置SPI2

三。Webserver开发
1.SDIO配置
(1)PC12设置为SDIO_CK时钟

D0与D1配置

D2与D3

2.SDIO配置
DMA配置


3.ETH以太网接口
(1)根据原理图配置引脚
注意:有些引脚不需要配置,原因是采用RMII接口(需要看懂原理才可以自己配置)



(2)配置外设


时钟出现错误,修改

四。Freertos配置
1.调整时钟


2.任务的创建
(1)任务优先级的划分

优先级划分:WebServer优先级最高,GUI优先级最低。判断方式,用户体验最佳。
(2)堆栈大小划分

在Freertos中配置堆大小时,需要把上述除以4(原因未知,且不一定除以4,可能就是单纯的分配问题,因为板子内存本来就不多)
Touch

Gui

WebServer

Zigbee

3.其余优先级的配置

五。LWIP配置
(1)使能LWIP。关闭DHCP服务

(2)使能LWIP。关闭展示全部参数

(3)增大池大小

(4)回调函数调用

测试:使用上述回调函数,判断网络连接

if(netif_is_link_up(netif)){
printf("netif link is up\r\n");
if(!netif_is_up(netif)){
netif_set_up(netif);
printf("netif is up\r\n");
}
}else{
printf("netif link is down\r\n");
}
六。FatFs(文件管理)
1.FatFs配置
(1)配置SD卡(SDIO配置之后才可以配置这个)

(2)设置HEAP堆空间大小

(3)点击生成(会弹出警告,询问是否自动生成代码,点击确定)

2.FatFs文件解释
(1)配置FatFs之后会出现的文件。

具体细节看下面这个图。上述三个文件对应下面的图。通用底层接口,链接机制,DSP驱动。

补充实验1:读写SD卡的内容,使用了usb读写卡,通过他读写SD卡
加入初始化代码,init在Freertos.c中的第一个任务中自动添加。

uint8_t u8chr[] = "hello";
uint32_t u32Wbytes;
/* USER CODE END Variables */
void MX_FATFS_Init(void)
{
/*## FatFS: Link the SD driver ###########################*/
retSD = FATFS_LinkDriver(&SD_Driver, SDPath);
/* USER CODE BEGIN Init */
if(f_mount(&SDFatFS,SDPath,1) == FR_OK)
{
if(f_open(&SDFile,(const char*)"fatfs.txt",FA_CREATE_ALWAYS|FA_WRITE) == FR_OK)
{
if(f_write(&SDFile,u8chr,sizeof(u8chr),&u32Wbytes) == FR_OK)
{
f_close(&SDFile);
}
}
}
/* additional user code for init */
/* USER CODE END Init */
}运行之后,SD卡通过usb转接口连接电脑。里面有fatfs.txt文件,打开里面有Hello字符。
注意:也可以fatfs.txt文件替换成scv文件,这是excel文件后缀名。
3.FatFs函数的参考手册
(1)进入c盘(cubemx的包目录下),找到第三方库存放地(Third_Party)
(2)找到FatFs文件夹中的doc,点击html文件

(3)打开html文件,函数解释都在这里,需要研究英文

4.底层文件的简要介绍
(1)FatFS底层实现

(2)通用底层驱动API

(3)我们应该研究什么东西
这些都是在KEIL工程中
//FatFS 提供的通用驱动文件的实现
ff_gen_drv.c
//针对SD底层驱动实现,封装成为通用的底层驱动API
//如果使能freeRTOS,在read和Write里面,会用到操作系统的消息队列sd_diskio.c
//HAL库的二次封装,把所有基于SD卡的操作都在bsp_driver_sd实现
bsp_driver_sd.c
七。emWin移植
Cubemx配置
(1)使能CRC

(2)使能FSMC的写

创建有警告,正常
1.emWin的图形文件库的寻找,移植
(1)在stm32的Cubemx的第三方目录的同层文件夹下,有个ST文件夹

(2)ST文件夹下的STemWin就是图形文件库,移植就好(复制粘贴到Cubemx文件工程下面)

(3)移植到keil的工程目录的第三方文件夹下《这是keil项目文件夹中》
2.keil工程的创建工作组
(1)创建工作组

(2)对工作组进行管理

(3)工作组路径与名称的设置

3.添加库,主要包括下面文件

(1)工作组添加存在的库文件

(2)第三方的工程文件

(3)添加emWin的os的GUI文件

(4)GUIconf.c与GUIDRV_Template.c与LCD_Template.c

(5)GUI_X_Touch_Analog.c
这个是触控,自己定义,Ctrl+N创建工程,Ctrl+s保存,在第三方库文件夹下的emWin文件中创建src文件夹。

在文件夹中保存文件

(7)STemWin_CM4_OS_wc16_ot.a
这个文件源码不开放,在Lib中,文件选择.a

注意:Keil是无法识别.a这种文件的,所以需要手动配置

选择library file

4.把移植好的文件(.h)加入工程文件
加入的是上述关联的文件夹


八。对代码的修改
为什么要对这些进行修改?
我们使用的API接口是不统一的,一个是GUI驱动函数,一个是Lcd驱动函数,我们要同时使用他们,需要对双方进行连接,即代码相互调用。(一个驱动对硬件,一个驱动对液晶屏)
1.SD卡的初始化设置

#include "stdio.h"
#include "string.h"
uint8_t retSD; /* Return value for SD */
char SDPath[4]; /* SD logical drive path */
FATFS SDFatFS; /* File system object for SD logical drive */
FIL SDFile; /* File object for SD */
/* USER CODE BEGIN Variables */
char u8chr[] = "hello";
uint32_t u32Wbytes;
char SensorBuff[100];
/* USER CODE END Variables */
void MX_FATFS_Init(void)
{
/*## FatFS: Link the SD driver ###########################*/
retSD = FATFS_LinkDriver(&SD_Driver, SDPath);
/* USER CODE BEGIN Init */
if(f_mount(&SDFatFS,SDPath,1) == FR_OK)
{
if(f_open(&SDFile,(const char*)"fatfs.txt",FA_CREATE_ALWAYS|FA_WRITE) == FR_OK)
{
if(f_write(&SDFile,u8chr,sizeof(u8chr),&u32Wbytes) == FR_OK)
{
f_close(&SDFile);
}
}
}
//创建文件
if(f_open(&SDFile,(const char*)"Sensor.csv",FA_CREATE_ALWAYS|FA_WRITE) == FR_OK){
//格式化文件流
//创建表头
sprintf(SensorBuff, "序号,温度,湿度,光照\r\n");
f_write(&SDFile,SensorBuff,strlen(SensorBuff),&u32Wbytes);
//循环写入表项
for(int i; i < 10; i++){
sprintf(SensorBuff, "%d,%d,%d,%d\r\n",i + 1, i + 20, i + 30, i + 40);
f_write(&SDFile,SensorBuff,strlen(SensorBuff),&u32Wbytes);
//刷新到文件中
// f_sync(&SDFile);
}
//关闭文件,缓存写入文件内
f_close(&SDFile);
}
/* additional user code for init */
/* USER CODE END Init */
}
2.对GUIconfig.c图形库的设置
(1)对宏定义进行修改

#define GUI_NUMBYTES (512*1024) //定义外部存储器大小
#define GUI_BLOCKSUZE (0X80) //定义最小内存库操作大小
#define SRAM_BANK_ADDR ((U32)0x68000000) //定义外部存储器首地址(2)对GUI_X_Config的修改

void GUI_X_Config(void) {
//
// 32 bit aligned memory area
//
volatile U32* aMemory = (volatile U32*)(SRAM_BANK_ADDR);
//
// Assign memory to emWin
//分配GUI存储器首地址及最小操作内存块大小
GUI_ALLOC_AssignMemory((void *)aMemory, GUI_NUMBYTES);
GUI_ALLOC_SetAvBlockSize(GUI_BLOCKSUZE);
//
// Set default font
//
GUI_SetDefaultFont(GUI_FONT_32_1);
}3.对GUIDRV_Template.c进行修改
通过这种方式,lcd的驱动与GUI的驱动就连接起来,可以相互配合
(1)加入头文件,lcd.h,原因:GUI图形库与lcd连接,通过找到点 后向lcd拷贝即可

(2)对set与get函数进行处理
set来画点

//添加lcd画点接口
LCD_DrawPoint(x,y,PixelIndex);get来获取点位置

//添加lcd读取点接口
PixelIndex = lcd_read_gram(x,y);4.对LCDConf_FledColor_Templae.c进行修改
(1)屏幕大小,屏幕上下左右的AD值,触摸屏的处理

#define XSIZE_PHYS 480 // 屏幕X坐标长度
#define YSIZE_PHYS 272 // 屏幕Y坐标长度
#define GUI_TOUCH_AD_Y_TOP 170 // 屏幕X0点坐标AD值
#define GUI_TOUCH_AD_Y_BOTTOM 1900 // 屏幕X480点坐标AD值
#define GUI_TOUCH_AD_X_LEFT 100 // 屏幕Y0点坐标AD值
#define GUI_TOUCH_AD_X_RIGHT 1930 // 屏幕Y272点坐标AD值
(2)Config配置函数处理

void LCD_X_Config(void) {
//
// Set display driver and color conversion
//设置成自己的API接口
GUI_DEVICE_CreateAndLink(&GUIDRV_Template_API, GUICC_M565, 0, 0);
//
// Display driver configuration, required for Lin-driver
// 显示尺寸配置
LCD_SetSizeEx (0, XSIZE_PHYS , YSIZE_PHYS);
LCD_SetVSizeEx(0, VXSIZE_PHYS, VYSIZE_PHYS);
//
//触摸笔的校准
GUI_TOUCH_Calibrate(GUI_COORD_X, 0, 480, GUI_TOUCH_AD_X_LEFT , GUI_TOUCH_AD_X_RIGHT);
GUI_TOUCH_Calibrate(GUI_COORD_Y, 0, 272, GUI_TOUCH_AD_Y_TOP, GUI_TOUCH_AD_Y_BOTTOM);
}(3)在驱动中写如lcd初始化
加入#include "lcd.h",自写的文件可以直接写到最顶上

5.GUI_X_Touch_Analog.c(这是自写的文件)
#include "GUI.h"
#include "Touch.h"
void GUI_TOUCH_X_ActivateX(void)
{
}
void GUI_TOUCH_X_ActivateY(void)
{
}
//获取X坐标AD值
int GUI_TOUCH_X_MeasureX(void)
{
return XPT_Read_XY(CMD_RDX);
}
//获取Y坐标AD值
int GUI_TOUCH_X_MeasureY(void)
{
return XPT_Read_XY(CMD_RDY);
}6.Freertos.c中
#include "GUI.h"void Touch_Task(void const * argument)
{
/* init code for LWIP */
MX_LWIP_Init();
/* init code for FATFS */
MX_FATFS_Init();
GUI_Init();
GUI_SetBkColor(GUI_BLUE);
GUI_SetFont(GUI_FONT_32_1);
GUI_SetColor(GUI_YELLOW);
GUI_Clear();
/* USER CODE BEGIN Touch_Task */
GUI_PID_STATE State;
printf("system is runing!\r\n");
/* Infinite loop */
for(;;)
{
//执行触摸笔检测
GUI_TOUCH_Exec();
//获取触摸笔状态值
GUI_TOUCH_GetState(&State);
//是否按下
if(State.Pressed){
//打印触摸笔坐标信息
GUI_DispStringAt("X:",0,0);
GUI_DispDecAt(State.x,32,0,4);
GUI_DispStringAt("Y:",0,24);
GUI_DispDecAt(State.y,32,24,4);
}
osDelay(10);
}
/* USER CODE END Touch_Task */
}运行结果:

下一节补充文章来源:https://www.toymoban.com/news/detail-689037.html
本人暂时遇到的BUG,stm32刷新速度很慢,非常慢。发现串口循环打印,暂用资源,ping命令ping不通。文章来源地址https://www.toymoban.com/news/detail-689037.html
到了这里,关于项目:智慧教室(cubemx+webserver)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!